一种游戏机手柄的水平旋转自动回正操控装置的制作方法
:
1.本实用新型涉及游戏手柄技术领域,特指一种游戏机手柄的水平旋转自动回正操控装置。
背景技术:
2.游戏手柄是一种常见电子游戏机的部件,通过操纵其按钮等,实现对游戏虚拟角色的控制,在现代社会科技的高速发展之下,娱乐方式也开始呈现多元化,其中游戏机及其设备的发展过程令人叹为观止,市场上的游戏设备也是百花齐放,其中又属游戏手柄最为多样。
3.在玩游戏过程中,根据游戏的特点,需要通过遥杆来操控游戏中的人物动作,即:向上、下、左、右。
4.具体而言,当在玩赛车游戏或类似游戏时,通过向左、向右拨动摇杆控制赛车游戏中汽车方向盘的方向旋转,与现实生活中的汽车方向盘转向控制大为不同,对于新手有又逻辑上的偏差,导致操控摇杆需要大量的练习才能熟练掌握,但是也会影响体验感,即摇杆操控的体验感不好。
5.现实中的汽车方向盘往一侧满打的角度通常为540-630
°
,其中,车前轮的单向转向角度为40-42
°
,方向盘每转动13-16
°
,车前轮转动1
°
。但是由于摇杆的自身结构限制,其摆动角度通常较小,导致摇杆小幅度摆动后,游戏中车前轮也会相对小幅度转动,其操控精度不高,体验感不佳。例如专利号为zl202010130072.3的中国实用新型专利申请公开的一种游戏手柄及其摇杆反馈力装置,其清楚显示了摇杆的装配结构,此类型的摇杆受到壳体以及转动轴和旋转架的限制,以致摇杆左右摆动的角度相对较小。
6.具体而言,由于摇杆自身结构限制,其摆动角度通常较小,从中间位置(即原点位置)往一侧打满的角度通常为15-23
°
,即当摇杆每摆动1
°
,游戏中车前轮转动2
°
,也就是说,现实中的方向盘与车前轮的转向比约为13:1,传统游戏手柄摇杆与游戏中车辆转向比约为0.5:1,使摇杆的操控精度不高,从而导致游戏中的车辆时常出现转向过快致使车辆失控,左右打飘的问题,进而影响赛车游戏的体验感。
7.有鉴于此,本发明人提出以下技术方案。
技术实现要素:
8.本实用新型的目的在于克服现有技术的不足,提供一种游戏机手柄的水平旋转自动回正操控装置。水平旋转自动回正操控装置中的方向操控盘往一侧满打的角度较大,可以有效提高操控精度,具体而言,方向操控盘往一侧满打的角度约为23-350
°
,以将游戏中车辆转向比最大可做到约8.5:1,其操控精度相较于传统摇杆,可提高了约17倍,同时模拟了现实中汽车方向盘的自动回正的操作,进而可以提高游戏的体验感。
9.为了解决上述技术问题,本实用新型采用了下述技术方案:该游戏机手柄的水平旋转自动回正操控装置包括壳体、穿设于该壳体内并可转动的轴芯轮、安装于轴芯轮的上
轴体的方向操控盘以及设置于壳体内并用于驱使逆时针/顺时针转动后的轴芯轮自动回正的自动回正机构,该轴芯轮的上轴体伸出于该壳体上端外,且方向操控盘显露于手柄主体表面并可大角度水平转动。
10.进一步而言,上述技术方案中,所述方向操控盘在水平方向逆时针转动或顺时针转动的角度大于23
°
。
11.进一步而言,上述技术方案中,所述壳体上、下端分别镶嵌固定有同轴心分布的第一轴承和第二轴承,所述轴芯轮的上轴体穿设于该第一轴承中并伸出于该壳体上端外,所述轴芯轮的下轴体穿设于该第二轴承中并伸出于该壳体端外。
12.进一步而言,上述技术方案中,所述上轴体上端固定有压环体,所述方向操控盘以可拆卸更换的方式固定于压环体上。
13.进一步而言,上述技术方案中,所述自动回正机构包括设置于壳体内腔上部并可滑动的第一定位摆锤和用于驱使滑动后的第一定位摆锤进行复位回正的第一复位元件、设置于壳体内腔下部并可滑动的第二定位摆锤和用于驱使滑动后的第二定位摆锤进行复位回正的第二复位元件;所述轴芯轮受外力驱动以在一个方向转动时,仅驱动第一定位摆锤或第二定位摆锤中的一个滑动;当外力消失后,由第一复位元件提供恢复力驱使第一定位摆锤反方向滑动以驱使该轴芯轮反方向转动,使轴芯轮回正;或是由第二复位元件提供恢复力驱使第二定位摆锤反方向滑动以驱使该轴芯轮反方向转动,使轴芯轮回正。
14.进一步而言,上述技术方案中,所述壳体内腔上部设置有阻挡第一定位摆锤的第一回正定位面;所述壳体内腔下部设置有阻挡第二定位摆锤的第二回正定位面,该第一回正定位面与第二回正定位面在同一竖直平面。
15.进一步而言,上述技术方案中,所述轴芯轮上端设置有第一驱动部,该第一驱动部与第一定位摆锤侧面接触并仅能驱使该第一定位摆锤沿一个方向滑动;所述轴芯轮上端设置有第二驱动部,该第二驱动部与第二定位摆锤侧面接触并仅能驱使该第二定位摆锤沿一个方向滑动。
16.进一步而言,上述技术方案中,所述第一复位元件和第二复位元件均为拉力弹簧、发条弹簧、橡皮筋、扭力弹簧中的任意一种。
17.进一步而言,上述技术方案中,当第一复位元件和第二复位元件均为拉力弹簧时,所述壳体内腔上部和下部分别设置有第一圆弧滑槽和第二圆弧滑槽,所述第一复位元件和第一定位摆锤均设置于第一圆弧滑槽内,且该第一复位元件一端通过第一螺丝与第一圆弧滑槽固定连接,该第一定位摆锤与第一复位元件另一端连接,第一定位摆锤一侧设置有与轴芯轮上端的第一驱动部对应的第一开放式槽;所述第二复位元件和第二定位摆锤均设置于第二圆弧滑槽内,且该第二复位元件一端通过第二螺丝与第二圆弧滑槽固定连接,该第二定位摆锤与第二复位元件另一端连接,第二定位摆锤一侧设置有与轴芯轮下端的第二驱动部对应的第二开放式槽;所述第一定位摆锤上端设置有向上凸起的第一弧形轨,该第一弧形轨嵌入该第一圆弧滑槽底部设置的第一轨槽内,且该第一轨槽一侧内壁作为第一回正定位面;所述第二定位摆锤下端设置有向下凸起的第二弧形轨,该第二弧形轨嵌入该第二圆弧滑槽底部设置的第二轨槽内,且该第二轨槽一侧内壁作为第二回正定位面,第一回正定位面与第二回正定位面在同一竖直平面。
18.进一步而言,上述技术方案中,当第一复位元件和第二复位元件均为发条弹簧时,
所述壳体内腔上部设置有第一偏心环体以及位于第一偏心环体外侧的第三圆弧滑槽,所述第一复位元件套设于第一偏心环体外围,其中该第一复位元件的内端与第一偏心环体外壁固定连接,第一定位摆锤以可滑动的方式安装于第三圆弧滑槽内,且该第一复位元件的外端伸入第三圆弧滑槽以与第一定位摆锤外壁固定连接,第一定位摆锤一侧设置有与第一驱动部对应的第一开放式槽;所述壳体内腔下部设置有第二偏心环体以及位于第二偏心环体外侧的第四圆弧滑槽,所述第二复位元件套设于第二偏心环体外围,其中该第二复位元件的内端与第二偏心环体外壁固定连接,第二定位摆锤以可滑动的方式安装于第四圆弧滑槽内,且该第二复位元件的外端伸入第四圆弧滑槽以与第二定位摆锤外壁固定连接,第二定位摆锤一侧设置有与第二驱动部对应的第二开放式槽;所述第三圆弧滑槽的一侧内壁作为第一回正定位面;所述第四圆弧滑槽的一侧内壁作为第二回正定位面;第一回正定位面与第二回正定位面在同一竖直平面;所述壳体内腔上部的内壁设置有第一弧形凸部,该第一弧形凸部与第二偏心环体半径最大的一侧相对应,并且第一弧形凸部与第一复位元件的最外圈抵压;所述壳体内腔下部的内壁设置有第二弧形凸部,该第二弧形凸部与第二偏心环体半径最大的一侧相对应,并且第二弧形凸部与第二复位元件的最外圈抵压。
19.采用上述技术方案后,本实用新型与现有技术相比较具有如下有益效果:本实用新型中水平旋转自动回正操控装置的结构与现有技术中的摇杆结构(例如zl202010130072.3)完全不同,操作方式也不同,为一种全新设计。所述水平旋转自动回正操控装置中的方向操控盘无外力作用时,该方向操控盘在自动回正机构的作用下处于平衡状态的原点(即处于初始状态位置),在使用过程中,用户可以通过拇指放置于方向操控盘上并推动该方向操控盘在水平方向沿着逆时针/顺时针转动,当方向操控盘转动后,轴芯轮也会随着同步转动,此时,该感应元件检测/感应轴芯轮的旋转角度并反馈至手柄主体内的pcb板,当方向操控盘上无外力作用后,该自动回正机构可以驱使旋转后的轴芯轮和方向操控盘复位,即可使方向操控盘自动回正(即自动回到初始状态位置),以便下一次操控,使用起来极为方便,并且方向操控盘是通过水平旋转实现操作,其旋转角度不会受限,以致使该方向操控盘的旋转角度可以设计得较大,以致能够使方向操控盘能够实现大角度转动,且高度模拟了赛车操控方式,与现实生活中的驾驶方式/习惯一致,大大的提高了游戏上手度和游玩体验,而且能够提高操控精度,以致更好地控制赛车游戏中的方向盘,可有效避免游出现戏中的车辆时常转向过快致使车辆失控,左右打飘的问题,大大增强了游戏体验感,令本实用新型具有极强的市场竞争力。
附图说明:
20.图1是本实用新型的使用状态图;
21.图2是本实用新型中采用第一种自动回正机构的水平旋转自动回正操控装置的剖视图;
22.图3是本实用新型中轴芯轮的主视图;
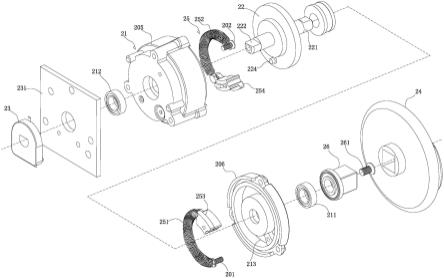
23.图4是本实用新型中水平旋转自动回正操控装置的爆炸图;
24.图5是本实用新型中底壳与第二拉链弹簧及第二定位摆锤的装配图;
25.图6是本实用新型中面壳与第一拉链弹簧及第一定位摆锤的装配图;
26.图7是本实用新型中面壳的结构图;
27.图8是图7沿a-a向的剖视图;
28.图9是本实用新型中底壳的结构图;
29.图10是图9沿b-b向的剖视图;
30.图11是本实用新型中第一定位摆锤的立体图;
31.图12是本实用新型中第一定位摆锤另一视角的立体图;
32.图13是本实用新型中采用第二种自动回正机构的水平旋转自动回正操控装置的立体图;
33.图14是图13的爆炸图;
34.图15是本实用新型中底壳与第二发条弹簧及第四定位摆锤的装配图;
35.图16是本实用新型中面壳与第一发条弹簧及第三定位摆锤的装配图。
36.图17是本发明采用第三种自动回正机构中面壳与第一复位元件及第一定位摆锤的装配图;
37.图18为图17的分解图;
38.图19是本发明采用第三种自动回正机构中底壳与第二复位元件及第二定位摆锤的装配图。
具体实施方式:
39.下面结合具体实施例和附图对本实用新型进一步说明。
40.见图1所示,为一种游戏手柄,其包括手柄主体1以及设置于手柄主体1上的水平旋转自动回正操控装置2,该水平旋转自动回正操控装置2与手柄主体1内的pcb板电性连接,以实现操控。
41.具体而言,结合图2-19所示,为水平旋转自动回正操控装置2的具体结构,所述水平旋转自动回正操控装置2包括壳体21、穿设于该壳体21内并可转动的轴芯轮22、用于检测/感应轴芯轮22旋转角度的感应元件23、安装于轴芯轮22的上轴体221的方向操控盘24以及设置于壳体21内并用于驱使逆时针/顺时针转动后的轴芯轮22自动回正的自动回正机构25,该轴芯轮22的上轴体221伸出于该壳体21上端外,且方向操控盘24显露于手柄主体1表面并可大角度水平转动。方向操控盘24可大角度水平转动是指在水平方向转动的角度大于23
°
。该水平旋转自动回正操控装置2中的方向操控盘24无外力作用时,该方向操控盘24在自动回正机构25的作用下处于平衡状态的原点(即处于初始状态位置),在使用过程中,用户可以通过拇指放置于方向操控盘24上并推动该方向操控盘24在水平方向沿着逆时针/顺时针转动,当方向操控盘24转动后,轴芯轮22也会随着同步转动,此时,该感应元件23检测/感应轴芯轮22的旋转角度并反馈至手柄主体1内的pcb板,当方向操控盘24上无外力作用后,该自动回正机构25可以驱使旋转后的轴芯轮22和方向操控盘24复位,即可使方向操控盘24自动回正(即自动回到初始状态位置),以便下一次操控,使用起来极为方便,并且方向操控盘24是通过水平旋转实现操作,与现有技术中的摇杆结构(例如zl202010130072.3)完全不同,操控方式也完全不同,而本实用新型中的方向操控盘24其旋转角度不会受限,以致使该方向操控盘24的旋转角度可以设计得较大,以致能够使方向操控盘24能够实现大角度转动,且高度模拟了赛车操控方式,与现实生活中的驾驶方式/习惯一致,大大的提高了游戏上手度和游玩体验,而且能够提高操控精度,以致更好地控制赛车游戏中的方向盘,可有
效避免游出现戏中的车辆时常转向过快致使车辆失控,左右打飘的问题,大大增强了游戏体验感,令本实用新型具有极强的市场竞争力。
42.相对背景技术的技术问题而言,本实用新型中的水平旋转自动回正操控装置的方向操控盘24往一侧满打的角度较大,可以有效提高操控精度,具体而言,方向操控盘往一侧(即往一个方向)满打的角度约为23-350
°
,以将游戏中车辆转向比最大可做到约8.5:1,其操控精度相较于传统摇杆,可提高了约17倍,同时模拟了现实中汽车方向盘的自动回正的操作,进而可以提高游戏的体验感。
43.具体而言,所述方向操控盘24在水平方向逆时针转动或顺时针转动的角度大于23
°
,也就是说,方向操控盘24在水平方向逆时针转动的角度大于23
°
,方向操控盘24在水平方向顺时针转动的角度大于23
°
,其区别于现有技术中摇杆的摆动最大为23
°
,以此能够更好的提高操控精度,即在方向操控盘24旋转一个相对大的角度后,赛车游戏中车前轮转动小角度,进而提高操控精度,避免赛车游戏中的车辆时常出现转向过快致使车辆失控、左右打飘的问题,进而影响赛车游戏的体验感。方向操控盘24在水平方向逆时针转动的角度大于23
°
,小于360
°
,也就是说,只要角度在24-359
°
之间的任意数值均可实现,并不作限制。
44.再进一步,作为优选的实施例,所述方向操控盘24在水平方向逆时针转动或顺时针转动的角度大于180
°
,小于360
°
,也就是说,方向操控盘24在水平方向逆时针转动的角度大于180
°
,方向操控盘24在水平方向顺时针转动的角度大于180
°
,以此能够更好的提高操控精度,即在方向操控盘24旋转13-16
°
后,赛车游戏中车前轮转动1
°
,进而提高操控精度,避免赛车游戏中的车辆时常出现转向过快致使车辆失控、左右打飘的问题,进而影响赛车游戏的体验感。
45.所述轴芯轮22的下轴体222与感应元件23配合安装,感应元件23用于检测/感应轴芯轮22旋转角度,所述感应元件23为电位器,该电位器安装于该电路板231上,且轴芯轮22的下轴体222与电位器连接,该电路板231安装于壳体21上。该电路板231通过连接器或导线与手柄主体1内的pcb板电性连接。当然,该感应元件23还可以是其它类型的感知角度变化的传感器即可,例如角度传感器、霍尔传感器、转角传感器、编码器等等。
46.结合图2和图4所示,所述上轴体221上端固定有压环体26,所述方向操控盘24以可拆卸更换的方式固定于压环体26上,以致用户可以根据实际使用要求更换不同造型的方向操控盘24,使用起来更加方便。具体而言,该压环体26通过第三螺丝261固定于该上轴体221上端,且该压环体26上端呈多边形,所述方向操控盘24下端设置有镶嵌槽,该镶嵌槽的形状与压环体26上端的造型相匹配,以致该压环体26上端镶嵌于该镶嵌槽中后以致固定,以此使方向操控盘24固定于该压环体26上端。
47.结合图2-4所示,所述壳体21上、下端分别镶嵌固定有同轴心分布的第一轴承211和第二轴承212,所述轴芯轮22的上轴体221穿设于该第一轴承211中并伸出于该壳体21上端外,所述轴芯轮22的下轴体222穿设于该第二轴承212中并伸出于该壳体21端外,以此保轴芯轮22安装的稳定性,并且保证同心度,以致可以时方向操控盘旋转起来更加顺畅,手感更佳。
48.以下对自动回正机构25的结构做具体说明:
49.结合图3-17所示,所述自动回正机构25包括设置于壳体21内腔上部并可滑动的第一定位摆锤253和用于驱使滑动后的第一定位摆锤253进行复位回正的第一复位元件251、
设置于壳体21内腔下部并可滑动的第二定位摆锤254和用于驱使滑动后的第二定位摆锤254进行复位回正的第二复位元件252。
50.在初始状态,第一复位元件251的作用力驱使第一定位摆锤253定位在初始位置,第二复位元件252的作用力驱使第二定位摆锤254定位在初始位置,进而驱使该轴芯轮22定位在初始位置。
51.当所述轴芯轮22受外力驱动以在一个方向转动时,仅驱动第一定位摆锤253或第二定位摆锤254中的一个滑动;例如,该轴芯轮22在顺时针旋转时,驱使该第一定位摆锤253顺时针滑动,此时,该第一复位元件251会被拉伸或压缩以形成恢复力,但是第二定位摆锤254在第二复位元件252的作用力下不动作。该轴芯轮22在逆时针旋转时,驱使该第二定位摆锤254逆时针滑动,此时,该第二复位元件252会被拉伸或内压缩以形成恢复力,第一定位摆锤253在第一复位元件251的作用力下不动作。
52.当外力消失后,由第一复位元件251提供恢复力驱使第一定位摆锤253反方向滑动以驱使该轴芯轮22反方向转动,使轴芯轮22回正;或是由第二复位元件252提供恢复力驱使第二定位摆锤254反方向滑动以驱使该轴芯轮22反方向转动,使轴芯轮22回正。
53.所述壳体21内腔上部设置有阻挡第一定位摆锤253的第一回正定位面2001;所述壳体21内腔下部设置有阻挡第二定位摆锤254的第二回正定位面2002,该第一回正定位面2001与第二回正定位面2002在同一竖直平面;在初始状态时,第一复位元件251的作用力驱使第一定位摆锤253定位在初始位置(即第一定位摆锤253与第一回正定位面2001接触的位置),第二复位元件252的作用力驱使第二定位摆锤254定位在初始位置,进而驱使该轴芯轮22定位在初始位置(即第二定位摆锤254与第二回正定位面2002接触的位置)。
54.所述轴芯轮22与第一定位摆锤253和第二定位摆锤254的装配方式均为非固定式装配。具体而言,所述轴芯轮22上端设置有第一驱动部223,该第一驱动部223与第一定位摆锤253侧面接触并仅能驱使该第一定位摆锤253沿一个方向滑动,例如,当轴芯轮22在顺时针方向转动时,通过该第一驱动部223与第一定位摆锤253侧面接触以推动该第一定位摆锤253在顺时针方向滑动;当轴芯轮22在逆时针方向转动时,该第一驱动部223与第一定位摆锤253侧面分离,此时该第一定位摆锤253不滑动。所述轴芯轮22上端设置有第二驱动部224,该第二驱动部224与第二定位摆锤254侧面接触并仅能驱使该第二定位摆锤254沿一个方向滑动。例如,当轴芯轮22在逆时针方向转动时,通过该第二驱动部224与第二定位摆锤254侧面接触以推动该第二定位摆锤254在逆时针方向滑动;当轴芯轮22在顺时针方向转动时,该第二驱动部224与第二定位摆锤254侧面分离,此时该第二定位摆锤254不滑动。
55.为了能够使第一驱动部223在随轴芯轮22转动的过程中稳定地推动第一定位摆锤253滑动,而又可以使第一驱动部223在反方向转动时能够顺畅脱离第一定位摆锤253,做出了以下设计:第一定位摆锤253一侧设置有与轴芯轮22上端的第一驱动部223对应的第一开放式槽2530,当该第一驱动部223进入该第一开放式槽2530后并推动该第一定位摆锤253滑动时,该第一驱动部223不会相对第一定位摆锤253打滑或错位而影响第一定位摆锤253滑动,且该第一驱动部223在反方向转动时能够顺畅脱离第一定位摆锤25。
56.为了能够使第二驱动部224在随轴芯轮22转动的过程中稳定地推动第二定位摆锤254滑动,而又可以使第二驱动部224在反方向转动时能够顺畅脱离第二定位摆锤254,做出了以下设计:第二定位摆锤254一侧设置有与轴芯轮22下端的第二驱动部224对应的第二开
放式槽2540,当该第二驱动部224进入该第二开放式槽2540后并推动该第二定位摆锤254滑动时,该第二驱动部224不会相对第二定位摆锤254打滑或错位而影响第二定位摆锤254滑动,且该第二驱动部224在反方向转动时能够顺畅脱离第一定位摆锤25。
57.所述第一复位元件251和第二复位元件252均为拉力弹簧、发条弹簧、橡皮筋、扭力弹簧中的任意一种。
58.具体而言,结合2-12所示,当第一复位元件251和第二复位元件252均为拉力弹簧时,为第一种自动回正机构,所述壳体21内腔上部和下部分别设置有第一圆弧滑槽213和第二圆弧滑槽214,所述第一复位元件251和第一定位摆锤253均设置于第一圆弧滑槽213内,且该第一复位元件251一端通过第一螺丝201与第一圆弧滑槽213固定连接,该第一定位摆锤253与第一复位元件251另一端连接,第一定位摆锤253一侧设置有与轴芯轮22上端的第一驱动部223对应的第一开放式槽2530;所述第二复位元件252和第二定位摆锤254均设置于第二圆弧滑槽214内,且该第二复位元件252一端通过第二螺丝202与第二圆弧滑槽214固定连接,该第二定位摆锤254与第二复位元件252另一端连接,第二定位摆锤254一侧设置有与轴芯轮22下端的第二驱动部224对应的第二开放式槽2540;优选的,该轴芯轮22的轴心与第二驱动部224和第一驱动部223在同一直线上。
59.所述第一复位元件251和第二复位元件252的安装方向相反,以提供两个方向的力,即该第一复位元件251在一个方向拉住第一定位摆锤253,例如在顺时针方向,与之对应的,第二复位元件252在一个方向拉住第二定位摆锤254,例如在逆时针方向,以致使该第一复位元件251和第二复位元件252在两个方向拉住第一定位摆锤253和第二定位摆锤254,并由该第一定位摆锤253和第二定位摆锤254定位轴芯轮22,使轴芯轮22处于原点位置/初始位置。更具体而言,在此状态时,该轴芯轮22的第一驱动部223进入第一开放式槽2530,同时该轴芯轮22的第二驱动部224进入第二开放式槽2540,即在第一复位元件251和第二复位元件252分别对第一驱动部223和第二驱动部224提供作用力,以确保轴芯轮22在无外力作用下,轴芯轮22的第一驱动部223定位于第一开放式槽2530中,同时该轴芯轮22的第二驱动部224定位于第二开放式槽2540中,进入在两个方向顶住轴芯轮22,使轴芯轮22定位而不能转动,以处于原点位置/初始位置。
60.所述第一定位摆锤253上端设置有向上凸起的第一弧形轨2533,该第一弧形轨2533嵌入该第一圆弧滑槽213底部设置的第一轨槽2131内,其滑动起来更加稳定性,且该第一轨槽2131一侧内壁作为第一回正定位面2001;所述第二定位摆锤254下端设置有向下凸起的第二弧形轨2543,该第二弧形轨2543嵌入该第二圆弧滑槽214底部设置的第二轨槽2141内,其滑动起来更加稳定性,且该第二轨槽2141一侧内壁作为第二回正定位面2002,第一回正定位面2001与第二回正定位面2002在同一竖直平面。
61.所述原点位置/初始位置均是指方向操控盘不转动时的平衡状态。
62.该第一复位元件251在一个方向拉住第一定位摆锤253时,该第一定位摆锤253被第一回正定位面2001阻挡,并定位于此处。与之对应的,第二复位元件252在一个方向拉住第二定位摆锤254,该第二定位摆锤254被第二回正定位面2002阻挡,并定位于此处。以致在初始状态时,第一复位元件251的作用力驱使第一定位摆锤253定位在初始位置(即第一定位摆锤253与第一回正定位面2001接触的位置),第二复位元件252的作用力驱使第二定位摆锤254定位在初始位置,进而驱使该轴芯轮22定位在初始位置(即第二定位摆锤254与第
二回正定位面2002接触的位置)。
63.当外力驱使所述方向操控盘24顺时针旋转后,驱使轴芯轮22同步在顺时针方向转动时,轴芯轮22通过该第一驱动部223与第一定位摆锤253侧面接触以推动该第一定位摆锤253在顺时针方向滑动,此时该第一复位元件251被拉伸以具有恢复力;而该轴芯轮22的第二驱动部224与第二定位摆锤254侧面分离,此时该第二定位摆锤254不滑动。在外力消失后,该第一复位元件251在其自身的恢复力缩回,同时会驱使该第一定位摆锤253复位,即可控制轴芯轮22及方向操控盘24自动回正,即自动回到初始位置。
64.或者是,当外力驱使所述方向操控盘24逆时针旋转后,驱使轴芯轮22同步在逆时针方向转动时,该第一驱动部223与第一定位摆锤253侧面分离,此时该第一定位摆锤253不滑动。轴芯轮22通过该第二驱动部224与第二定位摆锤254侧面接触以推动该第二定位摆锤254在逆时针方向滑动,第二复位元件252则会被拉伸以形成恢复力。在外力消失后,该第二复位元件252在其自身的恢复力缩回,同时会驱使该第二定位摆锤254复位,即可控制轴芯轮22及方向操控盘24自动回正,即自动回到初始位置。
65.所述壳体21包括有对合固定在一起的底壳205和面壳206,所述底壳205内设置有第二圆弧滑槽214;所述面壳206设置有所述的第一圆弧滑槽213。
66.所述第一定位摆锤253的侧面设置有用于与第一复位元件251另一端的第一钩体2511连接的第一连接部2531,该第一钩体2511直接勾住该第一连接部2531即可,装配起来极为方便。
67.所述第二定位摆锤254的侧面设置有用于与第二复位元件252另一端的第二钩体2521连接的第二连接部2541,该第二钩体2521直接勾住该第二连接部2541即可,装配起来极为方便。
68.所述第一复位元件251和第二复位元件252均为橡皮筋时,该橡皮筋的装配结构与拉力弹簧的装配结构相同,且原理及效果也相同。
69.所述第一复位元件251和第二复位元件252均为发条弹簧时,为第二种自动回正机构,结合图13-16所示,所述壳体21内腔上部设置有第一偏心环体215以及位于第一偏心环体215外侧的第三圆弧滑槽216,所述第一复位元件251套设于第一偏心环体215外围,其中该第一复位元件251的内端与第一偏心环体215外壁固定连接,第一定位摆锤253以可滑动的方式安装于第三圆弧滑槽216内,且该第一复位元件251的外端伸入第三圆弧滑槽216以与第一定位摆锤253外壁固定连接,第一定位摆锤253一侧设置有与第一驱动部223对应的第一开放式槽2530;所述壳体21内腔下部设置有第二偏心环体217以及位于第二偏心环体217外侧的第四圆弧滑槽218,所述第二复位元件252套设于第二偏心环体217外围,其中该第二复位元件252的内端与第二偏心环体217外壁固定连接,第二定位摆锤254以可滑动的方式安装于第四圆弧滑槽218内,且该第二复位元件252的外端伸入第四圆弧滑槽218以与第二定位摆锤254外壁固定连接,第二定位摆锤254一侧设置有与第二驱动部224对应的第二开放式槽2540;
70.所述第一复位元件251和第二复位元件252的安装方向相反,以提供两个方向的力,即该第一复位元件251在一个方向拉住第一定位摆锤253,例如在顺时针方向,与之对应的,第二复位元件252在一个方向拉住第二定位摆锤254,例如在逆时针方向,以致使该第一复位元件251和第二复位元件252在两个方向拉住第一定位摆锤253和第二定位摆锤254,并
由该第一定位摆锤253和第二定位摆锤254定位轴芯轮22,使轴芯轮22处于原点位置/初始位置。更具体而言,在此状态时,该轴芯轮22的第一驱动部223进入第一开放式槽2530,同时该轴芯轮22的第二驱动部224进入第二开放式槽2540,即在第一复位元件251和第二复位元件252分别对第一驱动部223和第二驱动部224提供作用力,以确保轴芯轮22在无外力作用下,轴芯轮22的第一驱动部223定位于第一开放式槽2530中,同时该轴芯轮22的第二驱动部224定位于第二开放式槽2540中,进入在两个方向顶住轴芯轮22,使轴芯轮22定位而不能转动,以处于原点位置/初始位置。
71.所述第一定位摆锤253上端设置有向上凸起的第一弧形轨2533,该第一弧形轨2533嵌入该第三圆弧滑槽216底部设置的第一轨槽2131内,其滑动起来更加稳定性,且该第一轨槽2131一侧内壁作为第一回正定位面2001;所述第二定位摆锤254下端设置有向下凸起的第二弧形轨2543,该第二弧形轨2543嵌入该第四圆弧滑槽217底部设置的第二轨槽2141内,其滑动起来更加稳定性,且该第二轨槽2141一侧内壁作为第二回正定位面2002,第一回正定位面2001与第二回正定位面2002在同一竖直平面。
72.所述原点位置/初始位置均是指方向操控盘不转动时的平衡状态。
73.该第一复位元件251在一个方向拉住第一定位摆锤253时,该第一定位摆锤253被第一回正定位面2001阻挡,并定位于此处。与之对应的,第二复位元件252在一个方向拉住第二定位摆锤254,该第二定位摆锤254被第二回正定位面2002阻挡,并定位于此处。以致在初始状态时,第一复位元件251的作用力驱使第一定位摆锤253定位在初始位置(即第一定位摆锤253与第一回正定位面2001接触的位置),第二复位元件252的作用力驱使第二定位摆锤254定位在初始位置,进而驱使该轴芯轮22定位在初始位置(即第二定位摆锤254与第二回正定位面2002接触的位置)。
74.所述第三圆弧滑槽216的一侧内壁作为第一回正定位面2001;所述第四圆弧滑槽218的一侧内壁作为第二回正定位面2002;第一回正定位面2001与第二回正定位面2002在同一竖直平面;
75.当外力驱使所述方向操控盘24顺时针旋转后,驱使轴芯轮22同步在顺时针方向转动时,轴芯轮22通过该第一驱动部223与第一定位摆锤253侧面接触以推动该第一定位摆锤253在顺时针方向滑动,此时该第一复位元件251被拉伸以具有恢复力;而该轴芯轮22的第二驱动部224与第二定位摆锤254侧面分离,此时该第二定位摆锤254不滑动。在外力消失后,该第一复位元件251在其自身的恢复力缩回,同时会驱使该第一定位摆锤253复位,即可控制轴芯轮22及方向操控盘24自动回正,即自动回到初始位置。
76.或者是,当外力驱使所述方向操控盘24逆时针旋转后,驱使轴芯轮22同步在逆时针方向转动时,该第一驱动部223与第一定位摆锤253侧面分离,此时该第一定位摆锤253不滑动。轴芯轮22通过该第二驱动部224与第二定位摆锤254侧面接触以推动该第二定位摆锤254在逆时针方向滑动,第二复位元件252则会被拉伸以形成恢复力。在外力消失后,该第二复位元件252在其自身的恢复力缩回,同时会驱使该第二定位摆锤254复位,即可控制轴芯轮22及方向操控盘24自动回正,即自动回到初始位置。
77.所述壳体21内腔上部的内壁设置有第一弧形凸部203,该第一弧形凸部203与第二偏心环体217半径最大的一侧相对应,并且第一弧形凸部203与第一复位元件251的最外圈抵压,以此可以防止第一复位元件251过度松散,以保证第一复位元件251的弹力能力;所述
壳体21内腔下部的内壁设置有第二弧形凸部204,该第二弧形凸部204与第二偏心环体217半径最大的一侧相对应,并且第二弧形凸部204与第二复位元件252的最外圈抵压,以此可以防止第二复位元件252过度松散,以保证第二复位元件252的弹力能力。
78.所述壳体21包括有对合固定在一起的底壳205和面壳206,所述底壳205内设置有第四圆弧滑槽218;所述面壳206设置有所述的第三圆弧滑槽217。
79.结合17-19所示,当第一复位元件251和第二复位元件252均为扭力弹簧时,为第三种自动回正机构,其装配结构与发条弹簧的装配结构基本相同,控制第一定位摆锤253和第二定位摆锤254回正的原理也基本相同,达到的技术效果也相同,在此不再一一赘述。
80.综上所述,本实用新型中水平旋转自动回正操控装置2的结构与现有技术中的摇杆结构(例如zl202010130072.3)完全不同,操控方式也完全不同,为一种全新设计。所述水平旋转自动回正操控装置2中的方向操控盘24无外力作用时,该方向操控盘24在自动回正机构25的作用下处于平衡状态的原点(即处于初始状态位置),在使用过程中,用户可以通过拇指放置于方向操控盘24上并推动该方向操控盘24在水平方向沿着逆时针/顺时针转动,当方向操控盘24转动后,轴芯轮22也会随着同步转动,此时,该感应元件23检测/感应轴芯轮22的旋转角度并反馈至手柄主体1内的pcb板,当方向操控盘24上无外力作用后,该自动回正机构25可以驱使旋转后的轴芯轮22和方向操控盘24复位,即可使方向操控盘24自动回正(即自动回到初始状态位置),以便下一次操控,使用起来极为方便,并且方向操控盘24是通过水平旋转实现操作,其旋转角度不会受限,以致使该方向操控盘24的旋转角度可以设计得较大,以致能够使方向操控盘24能够实现大角度转动,且高度模拟了赛车操控方式,与现实生活中的驾驶方式/习惯一致,大大的提高了游戏上手度和游玩体验,而且能够提高操控精度,以致更好地控制赛车游戏中的方向盘,可有效避免游出现戏中的车辆时常转向过快致使车辆失控,左右打飘的问题,大大增强了游戏体验感,令本实用新型具有极强的市场竞争力。
81.当然,以上所述仅为本实用新型的具体实施例而已,并非来限制本实用新型实施范围,凡依本实用新型申请专利范围所述构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型申请专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1