一种智能玩具机器人控制组件的制作方法
本技术属于控制组件,特别涉及一种智能玩具机器人控制组件。
背景技术:
1、智能玩具机器人控制组件包括用于控制智能玩具机器人工作的控制器以及用于连接智能玩具机器人和控制器的数据线,智能玩具机器人主要适用于小孩,主要是通过数据线将相应的控制器和智能玩具机器人进行连接以输入相应的指令以操控智能玩具机器人的具体工作。
2、经检索,现有技术中,中国专利申请号:cn201820593148.4,申请日:2018-04-24,公开了一种智能玩具机器人控制组件,该装置结构上设有拆卸装置,针从插孔插入,然后带动压块向右移动,带动受压杆向右移动,受压杆带动移动板移动,使其动触点和静触点分离,提高导线使其控制器停止运动,然后控制器通过导线传输给电路板,电路板通过导线对其线圈断电,线圈失去电源,使其电磁板失去电磁力,使铁块和电磁板分离,然后对其机体进行维修,简化拆卸的方式,节省时间,减少时间成本。
3、但该装置仍存在以下缺陷:
4、该装置的线圈与电路板的导线发生损坏时,电路板无法为线圈进行供电的时,电磁板和铁块就会分离,从而导致外壳和机体分离、掉落,从而容易产生损坏。
技术实现思路
1、针对上述问题,本实用新型提供了一种智能玩具机器人控制组件。包括机体、安装组件、拆卸组件和卡接组件,所述安装组件和拆卸组件均安装在机体上,所述卡接组件安装在拆卸组件上;
2、所述卡接组件包括卡接块、螺纹杆、螺纹套筒、轴承和两组定位杆,所述螺纹杆的一端转动连接在卡接块的底部内壁上,所述螺纹杆的另一端安装有齿轮,所述螺纹套筒螺纹连接在螺纹杆上,所述螺纹套筒上安装有两组第一铰接座,两组所述第一铰接座以螺纹套筒的中轴线为中心对称设置,所述轴承安装在螺纹杆上,所述轴承位于螺纹套筒的下方,所述轴承上安装有两组固定杆,两组所述固定杆以轴承的中轴线为中心对称设置。
3、进一步的,两组所述定位杆分别套接在两组固定杆上,两组所述定位杆上均固定安装有第二铰接座,两组所述第一铰接座上均铰接有铰接杆,两组所述铰接杆的一端分别铰接在两组第二铰接座上。
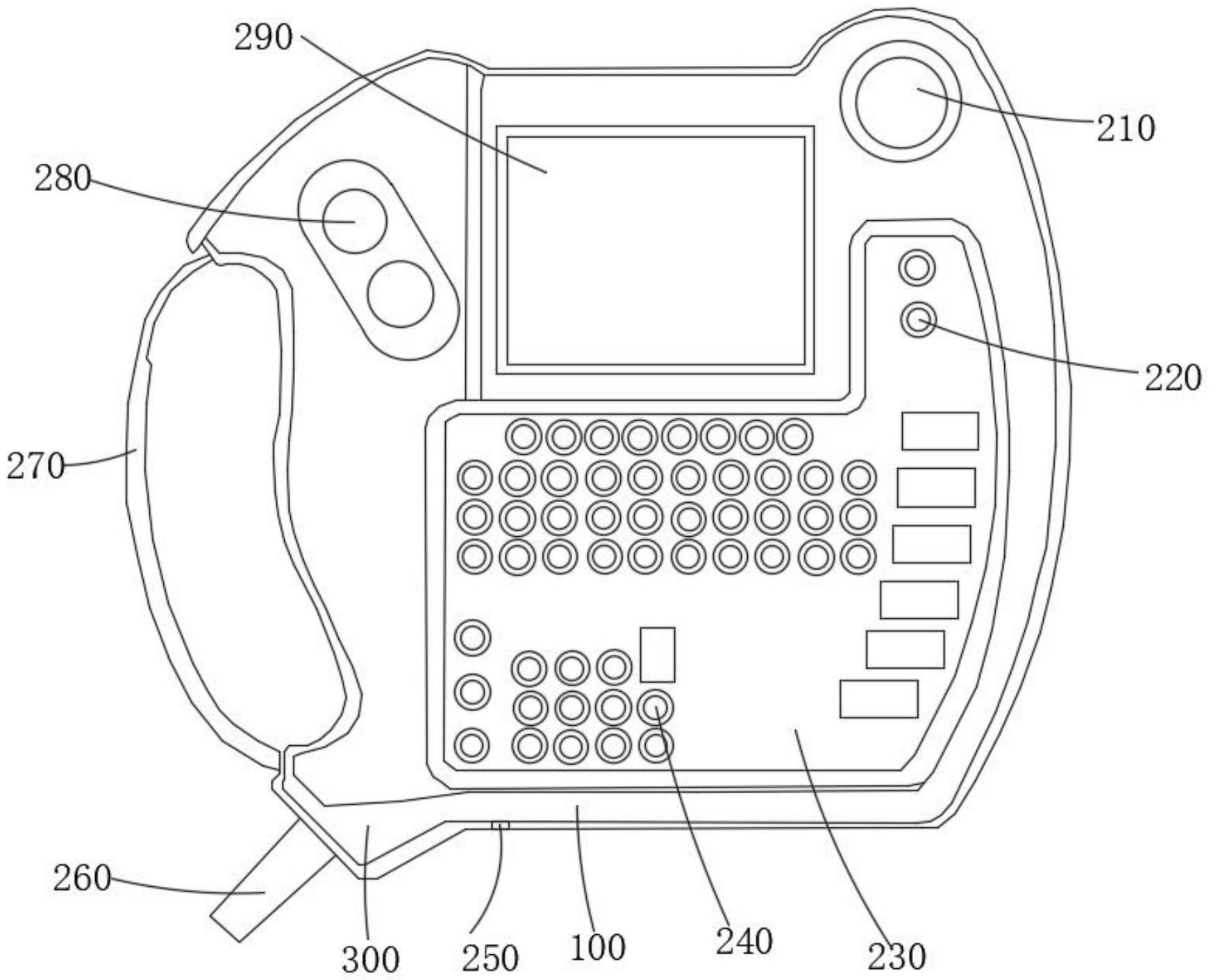
4、进一步的,所述安装组件包括开关按钮、操作按钮和操作面板,所述开关按钮、操作按钮和操作面板均安装在机体上,所述开关按钮位于机体的正前方上端右侧,所述操作按钮位于开关按钮的正下方,所述操作按钮位于操作面板正前方上端右侧。
5、进一步的,所述安装组件还包括控制按钮、连接块和连接杆,所述控制按钮嵌入安装于操作面板正前方下端左侧,所述连接块安装于机体左侧面,所述连接杆右侧面与连接块左侧面相连接。
6、进一步的,所述安装组件还包括把手、调节按钮和显示屏,所述把手右侧面与机体左侧面相焊接,所述调节按钮嵌入安装于机体正前方上端左侧,所述显示屏位于调节按钮右侧。
7、进一步的,所述机体上开设有第一安装槽和第二安装槽,所述第一安装槽内开设有定位槽,所述定位槽和定位杆配合使用,所述第一安装槽和卡接块配合使用。
8、进一步的,所述拆卸组件包括插孔、压块、外壳和受压杆,所述插孔安装在压块的外表面,所述压块安装在外壳的内侧左端,所述受压杆安装于外壳内侧并与压块右侧相连接。
9、进一步的,所述拆卸组件还包括导线、电路板和控制器,所述电路板和控制器均安装在外壳的内部,所述导线的前端与电路板相连接,所述控制器位于受压杆正下方并与导线末端相贴合。
10、进一步的,所述拆卸组件还包括固定板、静触点、动触点和移动板,所述固定板设于外壳的内侧右端,所述静触点设有两组并安装于固定板的右侧两端,所述静触点和动触点配合使用,所述动触点设有两个并设于移动板的左侧两端,所述移动板安装于外壳的内侧右端,且所述移动板安装在受压杆远离压块的一端。
11、进一步的,所述拆卸组件还包括弹簧、线圈、电磁板和铁块,所述弹簧位于移动板的右侧并相连接,所述弹簧的另一端安装在外壳的内壁上,所述铁块安装在第二安装槽内,所述电磁板位于铁块正下方并相贴合,所述线圈安装于电磁板外表面,所述线圈和电路板电性连接。
12、本实用新型的有益效果是:
13、本实用新型通过设置卡接组件,在线圈和电路板的导线发生损坏时,电路板无法为线圈进行供电的时,卡接块将外壳固定在机体上,从而使得外壳不会分离、掉落,使得控制组件不容易产生损坏,提高了安全性。
14、本实用新型的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过在说明书以及附图中所指出的结构来实现和获得。
技术特征:
1.一种智能玩具机器人控制组件,其特征在于:包括机体(100)、安装组件、拆卸组件(300)和卡接组件,所述安装组件和拆卸组件(300)均安装在机体(100)上,所述卡接组件安装在拆卸组件(300)上;
2.根据权利要求1所述的一种智能玩具机器人控制组件,其特征在于:两组所述定位杆(490)分别套接在两组固定杆(480)上,两组所述定位杆(490)上均固定安装有第二铰接座(450),两组所述第一铰接座(440)上均铰接有铰接杆(460),两组所述铰接杆(460)的一端分别铰接在两组第二铰接座(450)上。
3.根据权利要求2所述的一种智能玩具机器人控制组件,其特征在于:所述安装组件包括开关按钮(210)、操作按钮(220)和操作面板(230),所述开关按钮(210)、操作按钮(220)和操作面板(230)均安装在机体(100)上,所述开关按钮(210)位于机体(100)的正前方上端右侧,所述操作按钮(220)位于开关按钮(210)的正下方,所述操作按钮(220)位于操作面板(230)正前方上端右侧。
4.根据权利要求3所述的一种智能玩具机器人控制组件,其特征在于:所述安装组件还包括控制按钮(240)、连接块(250)和连接杆(260),所述控制按钮(240)嵌入安装于操作面板(230)正前方下端左侧,所述连接块(250)安装于机体(100)左侧面,所述连接杆(260)右侧面与连接块(250)左侧面相连接。
5.根据权利要求4所述的一种智能玩具机器人控制组件,其特征在于:所述安装组件还包括把手(270)、调节按钮(280)和显示屏(290),所述把手(270)右侧面与机体(100)左侧面相焊接,所述调节按钮(280)嵌入安装于机体(100)正前方上端左侧,所述显示屏(290)位于调节按钮(280)右侧。
6.根据权利要求5所述的一种智能玩具机器人控制组件,其特征在于:所述机体(100)上开设有第一安装槽和第二安装槽,所述第一安装槽内开设有定位槽,所述定位槽和定位杆(490)配合使用,所述第一安装槽和卡接块(400)配合使用。
7.根据权利要求3所述的一种智能玩具机器人控制组件,其特征在于:所述拆卸组件(300)包括插孔(301)、压块(302)、外壳(303)和受压杆(304),所述插孔(301)安装在压块(302)的外表面,所述压块(302)安装在外壳(303)的内侧左端,所述受压杆(304)安装于外壳(303)内侧并与压块(302)右侧相连接。
8.根据权利要求7所述的一种智能玩具机器人控制组件,其特征在于:所述拆卸组件(300)还包括导线(305)、电路板(315)和控制器(306),所述电路板(315)和控制器(306)均安装在外壳(303)的内部,所述导线(305)的前端与电路板(315)相连接,所述控制器(306)位于受压杆(304)正下方并与导线(305)末端相贴合。
9.根据权利要求8所述的一种智能玩具机器人控制组件,其特征在于:所述拆卸组件(300)还包括固定板(307)、静触点(308)、动触点(309)和移动板(310),所述固定板(307)设于外壳(303)的内侧右端,所述静触点(308)设有两组并安装于固定板(307)的右侧两端,所述静触点(308)和动触点(309)配合使用,所述动触点(309)设有两个并设于移动板(310)的左侧两端,所述移动板(310)安装于外壳(303)的内侧右端,且所述移动板(310)安装在受压杆(304)远离压块(302)的一端。
10.根据权利要求9所述的一种智能玩具机器人控制组件,其特征在于:所述拆卸组件(300)还包括弹簧(311)、线圈(312)、电磁板(313)和铁块(314),所述弹簧(311)位于移动板(310)的右侧并相连接,所述弹簧(311)的另一端安装在外壳(303)的内壁上,所述铁块(314)安装在第二安装槽内,所述电磁板(313)位于铁块(314)正下方并相贴合,所述线圈(312)安装于电磁板(313)外表面,所述线圈(312)和电路板(315)电性连接。
技术总结
本技术涉及控制组件技术领域,特别涉及一种智能玩具机器人控制组件。包括机体、安装组件、拆卸组件和卡接组件,所述安装组件和拆卸组件均安装在机体上,所述卡接组件安装在拆卸组件上;所述卡接组件包括卡接块、螺纹杆、螺纹套筒、轴承和两组定位杆,所述螺纹杆的一端转动连接在卡接块的底部内壁上,所述螺纹杆的另一端安装有齿轮,所述螺纹套筒螺纹连接在螺纹杆上,所述螺纹套筒上安装有两组第一铰接座。本技术通过设置卡接组件,在线圈和电路板的导线发生损坏时,电路板无法为线圈进行供电的时,卡接块将外壳固定在机体上,从而使得外壳不会分离、掉落,使得控制组件不容易产生损坏,提高了安全性。
技术研发人员:吴江鹏,陈泳欣
受保护的技术使用者:六安市智博科技有限公司
技术研发日:20221215
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!