一种椭圆机控制方法、系统、存储介质及智能终端与流程
本技术涉及椭圆机的领域,尤其是涉及一种椭圆机控制方法、系统、存储介质及智能终端。
背景技术:
1、椭圆机又叫太空漫步机,作为一种用于心肺功能锻炼效果很好的器械,它受到不少使用者和专业人士的喜爱。椭圆机的斜坡设计、阻力抵抗调节功能、编排好的运动模式以及专门对下肢某组织肌肉进行锻炼的能力让它成为专业健身房和家庭起居室里常见的运动器械。
2、相关技术中,椭圆机最大的特点是锻炼时膝关节不存在着力点,不仅能预防、降低、缓解颈椎病、肩周炎及上背部的疼痛,而且避免了跑步时所产生的冲击力,具备更好的安全系数。进而对膝关节受到损害的康复人群具有较好的训练效果,使康复人群在进行锻炼的同时保护了关节,达到较好的康复治疗效果。
3、针对上述中的相关技术,发明人认为现在的椭圆机调节模式较为单一,阻力值恒定,即使现在已经存在自动根据心率调节阻力的功能,但是却忽略了康复人员的病患情况,严重影响了病患的恢复,尚有改进的空间。
技术实现思路
1、为了改善现在的椭圆机阻力值恒定,忽略了康复人员的病患情况,严重影响了病患的恢复的问题,本技术提供一种椭圆机控制方法、系统、存储介质及智能终端。
2、第一方面,本技术提供一种椭圆机控制方法,采用如下的技术方案:
3、一种椭圆机控制方法,包括:
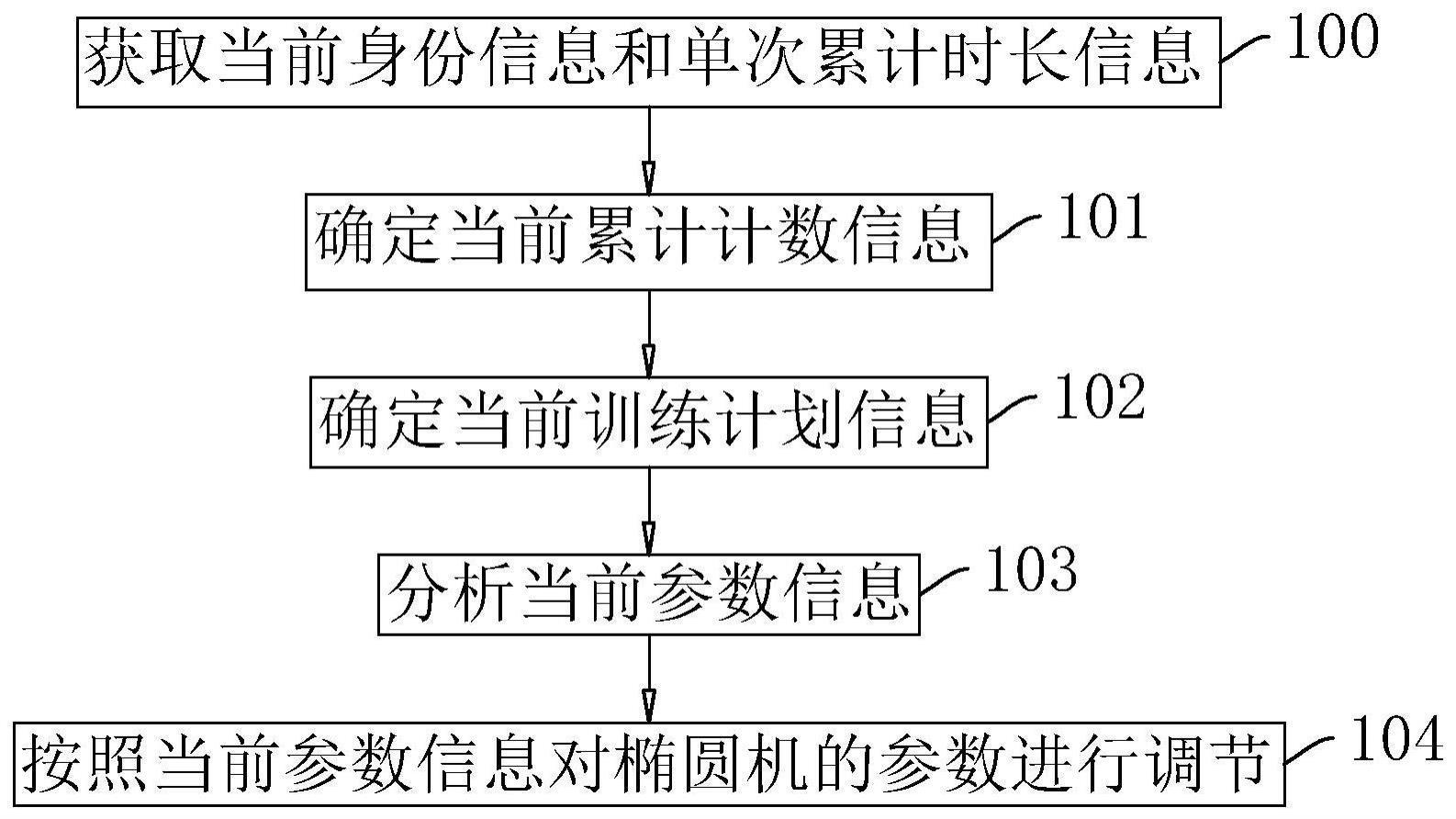
4、获取当前身份信息和单次累计时长信息;
5、根据预设的动态数据库中所存储的累计计数信息和当前身份信息进行匹配分析以确定当前身份信息所对应的累计计数,将该累计计数定义为当前累计计数信息;
6、根据预设的计划数据库中所存储的训练计划信息和当前累计计数信息进行进行匹配分析以确定当前累计计数信息所对应的训练计划,将当前累计计数信息所对应的训练计划定义为当前训练计划信息;
7、根据当前训练计划信息和单次累计时长信息分析出当前参数信息;
8、按照当前参数信息对椭圆机的参数进行调节。
9、通过采用上述技术方案,通过确定用户在数据库内记录的次数确定用户当次的康复训练计划,从而针对性地给到用户合理的有氧康复训练,提高了用户使用的合理性。
10、可选的,按照当前参数信息对椭圆机的参数进行调节的方法包括:
11、获取出现相同重复曲线的左右侧脚部下压力度曲线信息和左右侧手部握力曲线信息;
12、根据两侧的左右侧脚部下压力度曲线信息与预设的标准脚部下压力度曲线信息计算出脚部下压力度差值曲线信息;
13、根据两侧的左右侧手部握力曲线信息与预设的标准手部握力曲线信息计算出手部握力差值曲线信息;
14、判断脚部下压力度差值曲线信息是否落入预设的压力范围区域信息内且手部握力差值曲线信息是否落入预设的握力范围区域信息内;
15、若均落入,则不进行调节;
16、若至少一个不落入,则确定左右侧脚部下压力度曲线信息和左右侧手部握力曲线信息中较小的一个,将较小的一个左右侧脚部下压力度曲线信息定义为异常脚部下压力度曲线信息,将较小的一个左右侧手部握力曲线信息定义为异常手部握力曲线信息;
17、分析异常脚部下压力度曲线信息和异常手部握力曲线信息中出现的异常点,将该异常点定义为异常节点信息;
18、根据预设的作用数据库中所存储的施力端信息和异常脚部下压力度曲线信息、异常手部握力曲线信息以及异常节点信息进行匹配分析以确定异常脚部下压力度曲线信息、异常手部握力曲线信息以及异常节点信息所对应的施力端,将该施力端定义为异常施力端信息;
19、根据作用数据库中所存储的施力持续角度信息和异常施力端信息进行匹配分析以确定异常施力端信息所对应的施力持续角度,将该施力持续角度定义为异常持续角度信息;
20、根据预设的零件数据库中所存储的零配件信息和异常施力端信息进行匹配分析以确定异常施力端信息所对应的零配件,将该零配件定义为作用零配件信息;
21、于异常持续角度信息所对应的角度范围内时按照当前参数信息对作用零配件信息进行调节且于非异常持续角度信息所对应的角度范围内时按照预设的正常参数信息进行工作。
22、通过采用上述技术方案,通过确定异常情况确定用户之前受伤后需要康复的肢体部位,从而针对性地在对应的部分施加康复训练计划的参数,而其它区域正常训练,不影响康复训练的进行且不会产生后遗症,提高了椭圆机的针对性和有效性。
23、可选的,于异常持续角度信息所对应的角度范围内时按照当前参数信息对作用零配件信息进行调节的核对方法包括:
24、获取左右侧脚部图像信息和面部图像信息;
25、根据左右侧脚部图像信息分析出当前左右侧踏板角度信息;
26、于当前左右侧踏板角度信息等于异常持续角度信息的初始临界点时判断面部图像信息是否为痛苦表情图像信息;
27、若是,则于异常持续角度信息所对应的角度范围内时按照当前参数信息对作用零配件信息进行调节;
28、若否,则继续获取面部图像信息并将异常持续角度信息中按照当前参数信息对作用零配件信息进行调节的角度范围从初始临界点缩小直至面部图像信息为痛苦表情图像信息,将缩小的角度范围信息定义为缩小角度范围信息;
29、判断缩小角度范围信息是否大于预设的阶段角度范围信息;
30、若大于,则增加并更新当前累计计数信息的数值直至对应的当前训练计划信息发生变化;
31、若小于,则于异常持续角度信息所对应的角度范围内时按照当前参数信息对作用零配件信息进行调节。
32、通过采用上述技术方案,由于机械设置训练计划而没有实时调整,则会导致训练计划在后面的过程中逐渐和用户不适应,故通过用户脸部的图像反馈从而确定用户的康复情况是否按照训练计划正在进展,从而调整当前训练计划,提高了康复训练的变通性和灵活性。
33、可选的,分析异常脚部下压力度曲线信息和异常手部握力曲线信息的异常节点信息的方法包括:
34、将异常脚部下压力度差值曲线信息进行分析计算以转化为手部握力的曲线,将该手部握力的曲线定义为等效手部握力差值曲线信息;
35、根据等效手部握力差值曲线信息和手部握力差值曲线信息分析出等效手部握力差值绝对值曲线信息和手部握力差值绝对值曲线信息;
36、判断等效手部握力差值曲线信息和手部握力差值曲线信息之和是否等于0;
37、若等于0,则输出异常节点信息;
38、若小于0,则输出脱离信息;
39、若大于0,则判断等效手部握力差值绝对值曲线信息在异常节点信息处所对应的数值是否大于手部握力差值绝对值曲线信息;
40、若大于手部握力差值绝对值曲线信息,则输出脚部用力过猛信息;
41、若小于手部握力差值绝对值曲线信息,则输出手部用力过猛信息。
42、通过采用上述技术方案,通过确定用户手部和脚部的用力情况从而确定是否是异常情况还是用户人为的操作导致,提高了受伤的肢体部位检测分析的准确性。
43、可选的,若等效手部握力差值曲线信息和手部握力差值曲线信息之和小于0,则输出脱离信息的方法包括:
44、判断脚部下压力度差值曲线信息是否落入压力范围区域信息内;
45、若落入,则根据握力范围区域信息和手部握力差值曲线信息计算出代偿握力差值曲线信息;
46、根据代偿握力差值曲线信息将椭圆机上对应的握持杆进行施力以等效用户的手部握力;
47、若不落入,则根据压力范围区域信息和脚部下压力度差值曲线信息计算出代偿压力差值曲线信息;
48、根据代偿压力差值曲线信息将椭圆机上对应的踏板进行施力以等效用户的脚部下压力。
49、通过采用上述技术方案,通过在对应的异常点的踏板上减少阻力甚至施加推力,从而使得当需要该处的脚部力量进行发力时无需达到标准的数据踏板自身可以完成等效的推力,不影响另一侧的脚部的正常运动,提高了椭圆机的智能化。
50、可选的,若脚部下压力度差值曲线信息不落入压力范围区域信息内椭圆机控制的方法包括:
51、分析左右侧脚部图像信息得到脚部特征信息;
52、判断脚部特征信息是否存在;
53、若不存在,则根据代偿压力差值曲线信息将椭圆机上对应的踏板进行施力以等效用户的脚部下压力;
54、若存在,则判断脚部特征信息是否固定不变;
55、若是,则根据代偿压力差值曲线信息将椭圆机上对应的踏板进行施力以等效用户的脚部下压力;
56、若否,则确定左右侧脚部下压力度曲线信息中较大的一个,将较大的一个左右侧脚部下压力度曲线信息定义为正常脚部下压力度曲线信息;
57、根据预设的载重数据库中所存储的脚部分摊重量信息和正常脚部下压力度曲线信息进行匹配分析以确定正常脚部下压力度曲线信息所对应的脚部分摊重量,将该脚部分摊重量信息定义为正常脚部分摊重量信息;
58、根据预设的康复数据库中所存储的活动力度曲线信息和正常脚部分摊重量信息进行匹配分析以确定正常脚部分摊重量信息所对应的活动力度曲线,将活动力度曲线定义为康复力度曲线信息;
59、根据康复力度曲线信息和代偿压力差值曲线信息计算出补偿压力和曲线信息;
60、根据补偿压力和曲线信息将椭圆机上对应的踏板进行施力以等效用户的脚部下压力。
61、通过采用上述技术方案,当用户脚部在踏板上时,主动施加推力且正常带动脚部活动,使得某些僵硬的脚部能够无需借助另外的一个腿即可活动开来,在不增加另外的腿的负载的情况下,提高了康复训练的效果。
62、可选的,若脚部下压力度差值曲线信息不落入压力范围区域信息内椭圆机控制的方法进一步包括:
63、分析左右侧脚部图像信息得到踏板特征信息;
64、判断脚部特征信息和踏板特征信息之间是否存在预设的间隙特征信息;
65、若存在,则获取出现间隙特征信息的出现角度信息;
66、根据当前参数信息、出现角度信息和预设的适当增加阻力信息重新合并出调整参数信息;
67、按照调整参数信息对作用零配件信息进行调节且根据补偿压力和曲线信息将椭圆机上对应的踏板进行施力以等效用户的脚部下压力;
68、若不存在,则根据补偿压力和曲线信息将椭圆机上对应的踏板进行施力以等效用户的脚部下压力。
69、通过采用上述技术方案,通过确定脚部和踏板之间的距离,从而确定是否因为转速过快而导致用户受伤的腿是否会跟不上步伐而脱离,从而在脱离时将对应的正常位置的阻力增大,相对降低椭圆机的转动速度而使得用户的脚部可以和踏板贴合跟上,提高了椭圆机的智能化和合理化。
70、第二方面,本技术提供一种椭圆机控制系统,采用如下的技术方案:
71、一种椭圆机控制系统,包括:
72、获取模块,用于获取当前身份信息、单次累计时长信息、左右侧脚部下压力度曲线信息、左右侧手部握力曲线信息、左右侧脚部图像信息和面部图像信息;
73、存储器,用于存储上述任一种椭圆机控制方法的控制方法的程序;
74、处理器,存储器中的程序能够被处理器加载执行且实现上述任一种椭圆机控制方法的控制方法。
75、通过采用上述技术方案,通过确定用户在数据库内记录的次数确定用户当次的康复训练计划,从而针对性地给到用户合理的有氧康复训练,提高了用户使用的合理性。
76、第三方面,本技术提供智能终端,采用如下的技术方案:
77、智能终端,包括存储器和处理器,存储器上存储有能够被处理器加载并执行上述任一种椭圆机控制方法的计算机程序。
78、通过采用上述技术方案,通过确定用户在数据库内记录的次数确定用户当次的康复训练计划,从而针对性地给到用户合理的有氧康复训练,提高了用户使用的合理性。
79、第四方面,本技术提供提供计算机存储介质,能够存储相应的程序,具有检测灵敏,动作准确的特点。
80、计算机可读存储介质,采用如下的技术方案:
81、计算机可读存储介质,存储有能够被处理器加载并执行上述任一种椭圆机控制方法的计算机程序。
82、通过采用上述技术方案,通过确定用户在数据库内记录的次数确定用户当次的康复训练计划,从而针对性地给到用户合理的有氧康复训练,提高了用户使用的合理性。
83、综上所述,本技术包括以下至少有益技术效果:
84、1.通过确定次数确定用户当次的康复训练计划,从而针对性地给到用户合理的有氧康复训练,提高了用户使用的合理性;
85、2.通过针对性地在对应的部分施加康复训练计划的参数,不影响康复训练的进行且不会产生后遗症,提高了椭圆机的针对性和有效性;
86、3.主动施加推力且正常带动脚部活动,使得某些僵硬的脚部能够无需借助另外的一个腿即可活动开来,在不增加另外的腿的负载的情况下,提高了康复训练的效果。
- 还没有人留言评论。精彩留言会获得点赞!