一种基于机器视觉的急行跳远助跑速度测量方法
本发明涉及机器视觉,具体是一种基于机器视觉的急行跳远助跑速度测量方法。
背景技术:
1、急行跳远是最常见的田径运动项目之一,急行跳远技术要点一般分为四个阶段:助跑、起跳、腾空和落地。其中助跑速度是影响跳远成绩的主要因素之一,运动员根据自身能力获得合理助跑速度才能得到理想的跳远成绩。助跑速度值一般是通过高速视频分析或者红外光电计时门等专业的设备进行测量,由于设备昂贵、复杂、安装不便等因素,难以在高校体育跳远课程教学场景中普及。因此,研究一种低成本的助跑速度测量方案是十分必要的。
技术实现思路
1、本发明的目的是针对现有技术中存在的不足,而提供一种基于机器视觉的急行跳远助跑速度测量方法。这种方法操作方便,成本低,扩展性强,提高测速的鲁棒性。
2、实现本发明目的的技术方案是:
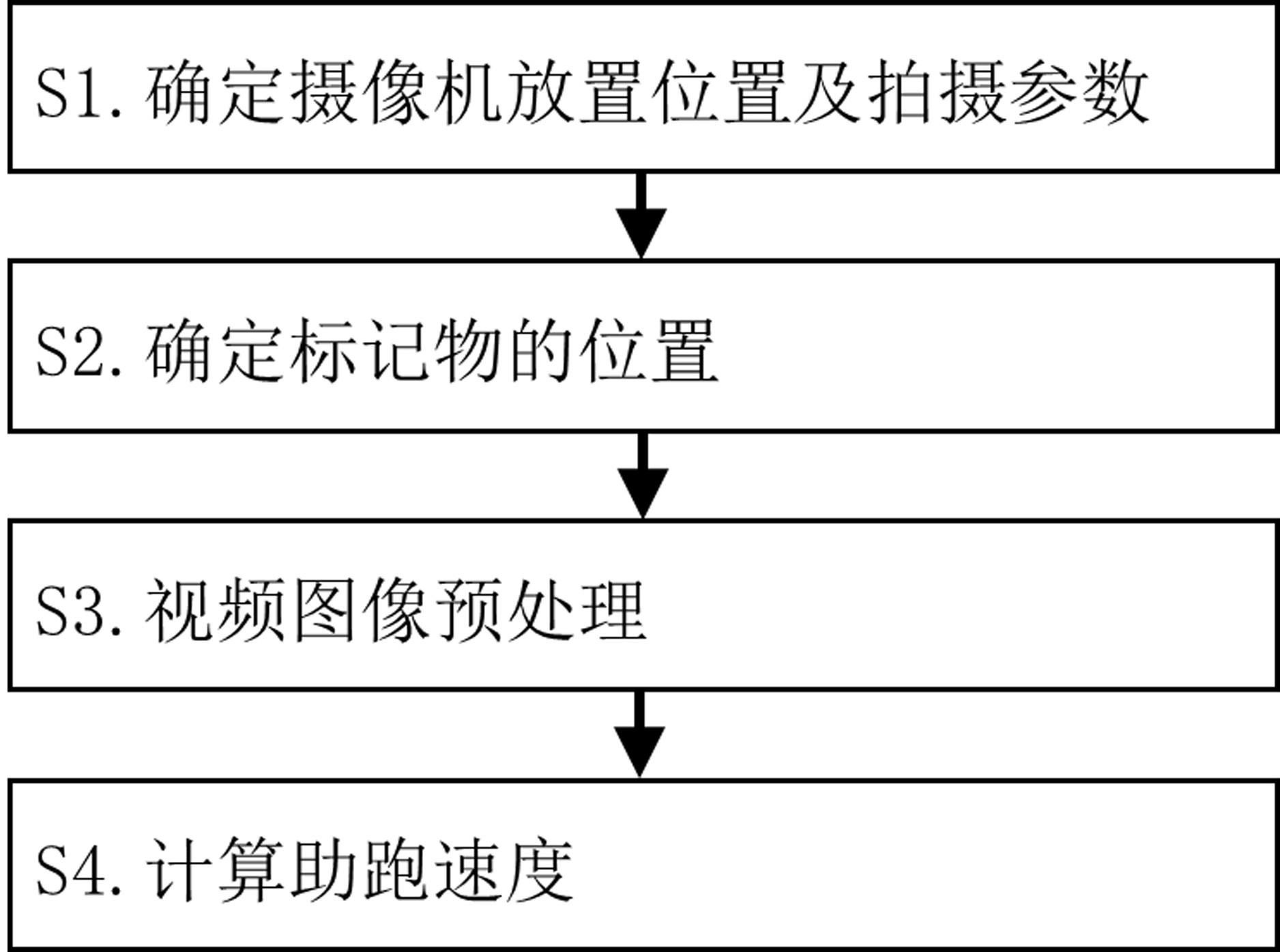
3、一种基于机器视觉的急行跳远助跑速度测量方法,包括如下步骤:
4、s1.确定摄像机放置位置及拍摄参数:根据跳远场景的特点确定摄像机的放置位置以及制定跳远过程中的摄像机拍摄参数,摄像机摆放在与助跑区域边线垂直距离为d米、与起跳线水平垂直距离为d1+d2米位置处,摄像机用于获取助跑过程的视频序列;
5、s2.确定标记物的位置:在助跑区域边线放置标记物,在助跑区域两边缘放置标志物p11、p12、p21、p22、p31、p32、p41、p42,p11与p12的连线为l1,p21与p22的连线为l2,p31与p32的连线为l3,p41与p42的连线为l4,l1、l2、l3、l4都垂直于助跑区域边线,l1与l2和l3与l4之间的距离均为d1,l2和l3与摄像机中垂线的垂直距离均为d2;
6、s3.视频图像预处理:按步骤s1、s2放置好摄像机及标记物,录制助跑过程视频,提取视频序列中的第一帧图像,并人工标记图像中的标记物,得到标记物在图像中的坐标;
7、s4.测量助跑速度:bbox为人体边界框,p为边界框底部中点,具体速度测量过程如下:
8、s4-1:输出人体边界框bbox,使用训练好的目标检测算法yolov5模型对跳远助跑视频进行人体检测,得到运动员在视频帧中的位置信息,为避免其他人的干扰,利用deepsort目标跟踪算法进行预测运动员在下一帧中的位置信息,结合目标检测算法和deepsort目标跟踪算法实现对运动员跟踪定位,使用训练好的yolov5-deepsort目标跟踪检测模型对输入的视频流逐帧进行人体检测,当检测到人体且人体边界框的位置信息处于助跑区域时,实时输出运动员在视频帧中位置信息,即yolov5-deepsort目标跟踪检测算法检测输出人体的矩形边界框,输出边界框的信息为(xmin,ymin,xmax,ymax),计算得出运动员位置边界框底部中心点p的坐标为:
9、
10、s4-2:直线l1中,设p11、p12两点的坐标分别为(x11,y11)、(x12,y12),由两点的坐标求出通过点p11、p12的直线方程为:
11、ax+by+c=0 (2)
12、其中a=y12-y11,b=x11-x12,c=x12*y11-x11*y12,同理求得通过点p21、p22的l2直线方程;
13、s4-3:以边界框底部中心点p(xp,yp)作为探测点,根据公式(3)判断点p在直线的哪一侧;
14、d=a*xp+b*yp+c (3)
15、定义直线l1的偏向方向是由p11指向p12,当d<0时,点p在直线l1右侧,当d=0时,点p在直线l1上,当d>0时,点p在直线l1左侧;对于直线l1,检测到d≤0时,说明点p经过直线l1,记录当前视频流帧数fs,同理当经过l2时,记录当前帧数fe;
16、s4-4:由此计算出运动员经过直线l1、l2时的平均速度:
17、
18、其中dl1,2是直线l1,l2的实际距离,fps是输入视频的帧率,是点p经过l1,l2两直线的实际时间;
19、s4-5:重复步骤s4-2至s4-4得到运动员经过直线l3,l4帧数分别为f′s,f′e,平均速度vl3,4,为便于验证分析运动员在一段路程的加速度与跳远成绩的影响,计算得出运动员在这段区域内的加速度为:
20、
21、其中为点p通过直线l1,l4的总时间,vl1,2和vl3,4为最终测量的助跑速度。
22、所述步骤s1中摄像机拍摄参数包括拍摄视频时用的分辨率、帧率以及存储格式。本技术方案关键点为:
23、(1)为避免助跑阶段其他人员的干扰,使用yolov5-deepsort目标跟踪算法实时跟踪助跑区域内的运动员,助跑区域之外人员不跟踪。使用目标跟踪算法跟踪助跑第二目的是为后续分析助跑轨迹做好基础,充分展示了此测速方法的可扩展性。
24、(2)对于目标跟踪算法输出的边界框基础上构建虚拟线助跑速度测量模型,可以计算出助跑者在一段距离内的平均速度。
25、这种方法在使用虚拟线测速模型进行测速时,通过yolov5-deepsort目标跟踪检测算法跟踪运动员避免其他外部人员的干扰,提高测速的鲁棒性;另外这种方法是基于机器视觉的方法对助跑速度进行测量,在能降低速度测量成本的同时能够提高测速的扩展性,比如yolov5-deepsort算法可对运动员助跑阶段进行轨迹跟踪等运动分析。
技术特征:
1.一种基于机器视觉的急行跳远助跑速度测量方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于机器视觉的急行跳远助跑速度测量方法,其特征在于,所述步骤s1中摄像机拍摄参数包括拍摄视频时用的分辨率、帧率以及存储格式。
技术总结
本发明公开了一种基于机器视觉的急行跳远助跑速度测量方法,包括如下步骤:S1.确定摄像机放置位置及拍摄参数;S2.确定标记物的位置;S3.视频图像预处理;S4.测量助跑速度。这种方法操作方便,成本低,扩展性强,提高测速的鲁棒性。
技术研发人员:陆声链,麦贤健,邱志良,李帼
受保护的技术使用者:广西师范大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!