一种游戏手柄维修校准系统的制作方法
本发明涉及游戏手柄,具体地说,涉及一种游戏手柄维修校准系统。
背景技术:
1、传统的游戏手柄摇杆出现质量问题后,一般需要用户自行更换摇杆元器件。在更换摇杆元器件后,由于没有手柄原厂的软件进行摇杆校准,会出现摇杆准星偏移,准星晃动等问题,因此替换摇杆后直接使用摇杆效果不佳,目前,传统的摇杆维修方法为更换摇杆元器件后,再焊接可调电阻线路板,焊接可调电阻线路板完毕后,通过手动调整此电路板上电阻的值,来达到优化摇杆效果的目的,此方法有多种弊端:
2、其一、可调电阻的值范围有局限,无法满足所有手柄摇杆校准需求;
3、其二、可调电阻需要手动逐步调试,效率低并且对调试人员的技术经验要求高,无法普遍大规模使用;
4、其三、可调电阻仅能对摇杆中心点归零,无法在整个摇杆输出电压范围内进行完整匹配,因此维修范围窄,维修效果差,无法达到原装全新手柄摇杆的效果;
5、其四、可调电阻方式无法改变摇杆的曲线,死区等效果,功能局限多;
6、其五、可调电阻方式无法设置多组摇杆参数并实时切换;
7、其六、可调电阻电路板本身无法升级,使用局限大,鉴于此,我们提出一种游戏手柄维修校准系统。
技术实现思路
1、本发明的目的在于提供一种游戏手柄维修校准系统,以解决上述背景技术中提出的问题。
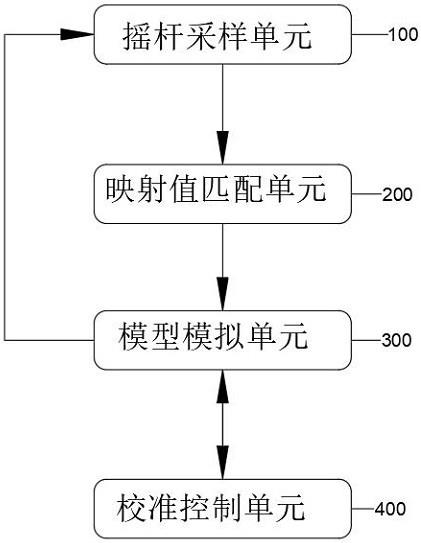
2、为实现上述目的,本发明提供一种游戏手柄维修校准系统,包括摇杆采样单元、映射值匹配单元、模型模拟单元和校准控制单元;
3、所述摇杆采样单元用于对手柄进行测试,并采集手柄摇杆位置和电压输出之间的关系数据;所述映射值匹配单元用于根据手柄摇杆电压输出和摇杆位置之间的对应关系,通过映射表生成与所述摇杆采样单元中手柄摇杆所匹配的模拟值,再通过转换器输出给手柄;所述模型模拟单元用于建立多项式模型,将模拟值作为自变量,摇杆位置作为因变量,建立模型方程,将采集得到的摇杆位置和模拟值带入模型方程中,使用最小二乘法求解多项式参数和偏移量信息;所述校准控制单元用于将多项式参数和偏移量信息保存,采用校准算法对摇杆输入信号的校准。
4、作为本技术方案的进一步改进,所述摇杆采样单元中的手柄摇杆位置包括x轴摇杆位置和y轴摇杆位置,其中:
5、所述x轴摇杆位置与电压输出之间的表达式为:
6、
7、其中,x轴摇杆量程指的是手柄x轴摇杆的最大值减去最小值;
8、所述y轴摇杆位置与电压输出之间的表达式为:
9、
10、其中,y轴摇杆量程指的是手柄y轴摇杆的最大值减去最小值。
11、作为本技术方案的进一步改进,所述摇杆采样单元包括与手柄摇杆和校准控制单元连接的转换器ad-da,所述转换器ad-da包括引脚adc0、引脚adc1、引脚dac0和引脚dac1,其中:
12、所述引脚adc0和引脚adc1用于连接校准控制单元,将模拟信号转换为数字信号输入,所述引脚dac0和引脚dac1用于连接手柄摇杆,将数字信号转换为模拟信号输出。
13、作为本技术方案的进一步改进,所述映射值匹配单元的映射表生成包括以下步骤:
14、将手柄摇杆和摇杆采样单元连接上手机程序,程序获取手机数值后,将手柄摇杆数值发给摇杆采样单元,摇杆采样单元遍历所有da值,生成映射表。
15、作为本技术方案的进一步改进,所述模型模拟单元包括建立模型方程的表达式为:
16、
17、其中,为摇杆位置和对应模拟值的数据得到的多项式系数,为输入模拟值,为对应的摇杆位置,为方程的阶数。
18、作为本技术方案的进一步改进,所述模型模拟单元求解多项式参数和偏移量信息包括以下步骤:
19、收集组摇杆位置和对应的模拟值的数据;
20、根据采集的摇杆位置和对应的模拟值,生成一个包含自变量的矩阵a;
21、使用最小二乘法求解矩阵a,得到最小二乘法拟合的多项式方程,并用于计算模拟值和摇杆位置之间的映射关系。
22、作为本技术方案的进一步改进,所述校准控制单元包括校准误差检测模块和校准系数计算模块;
23、所述校准误差检测模块用于采集一系列范围内的输入信号,在获得多项式模型之后,分别计算每个输入信号下的校准输出信号,并记录校准误差;
24、所述校准系数计算模块用于接收校准误差检测模块的误差信号,通过单点校准法求解出使得误差最小的校准系数。
25、作为本技术方案的进一步改进,所述校准误差检测模块采用均方根误差来衡量误差,计算公式如下:
26、
27、其中,为误差值, m是通过多项式模型计算出来的校准输出信号, m是实际采集到的输出信号, n表示采样点数量。
28、作为本技术方案的进一步改进,所述校准控制单元还包括参数实时保存模块和设置存档模块;
29、所述参数实时保存模块用于对手柄摇杆各类参数进行实时改变保存;所述设置存档模块用于对每次改变进行存档。
30、与现有技术相比,本发明的有益效果:
31、该游戏手柄维修校准系统中,通过摇杆采样单元采集摇杆位置和电压输出之间的关系数据,然后映射值匹配单元通过映射表生成匹配的模拟值,提高了游戏手柄调节的范围,方便整个摇杆输出电压范围内进行完整匹配,而模型模拟单元建立多项式模型,并通过校准控制单元的校准算法对输入信号进行校准,使得手柄能够精确地感知玩家的输入,不需要多次手动调节,满足自动化维修校准的功能,从而达到更加流畅自然的游戏操作效果,具有更好的兼容性和普适性。
技术特征:
1.一种游戏手柄维修校准系统,其特征在于:包括摇杆采样单元(100)、映射值匹配单元(200)、模型模拟单元(300)和校准控制单元(400);
2.根据权利要求1所述的游戏手柄维修校准系统,其特征在于:所述摇杆采样单元(100)中的手柄摇杆位置包括x轴摇杆位置和y轴摇杆位置,其中:
3.根据权利要求2所述的游戏手柄维修校准系统,其特征在于:所述摇杆采样单元(100)包括与手柄摇杆和校准控制单元(400)连接的转换器ad-da,所述转换器ad-da包括引脚adc0、引脚adc1、引脚dac0和引脚dac1,其中:
4.根据权利要求3所述的游戏手柄维修校准系统,其特征在于:所述映射值匹配单元(200)的映射表生成包括以下步骤:
5.根据权利要求1所述的游戏手柄维修校准系统,其特征在于:所述模型模拟单元(300)包括建立模型方程的表达式为:
6.根据权利要求5所述的游戏手柄维修校准系统,其特征在于:所述模型模拟单元(300)求解多项式参数和偏移量信息包括以下步骤:
7.根据权利要求1所述的游戏手柄维修校准系统,其特征在于:所述校准控制单元(400)包括校准误差检测模块(410)和校准系数计算模块(420);
8.根据权利要求7所述的游戏手柄维修校准系统,其特征在于:所述校准误差检测模块(410)采用均方根误差来衡量误差,计算公式如下:
9.根据权利要求8所述的游戏手柄维修校准系统,其特征在于:所述校准控制单元(400)还包括参数实时保存模块(430)和设置存档模块(440);
技术总结
本发明涉及游戏手柄技术领域,具体地说,涉及一种游戏手柄维修校准系统。其包括摇杆采样单元、映射值匹配单元、模型模拟单元和校准控制单元。本发明通过摇杆采样单元采集摇杆位置和电压输出之间的关系数据,然后映射值匹配单元通过映射表生成匹配的模拟值,提高了游戏手柄调节的范围,方便整个摇杆输出电压范围内进行完整匹配,而模型模拟单元建立多项式模型,并通过校准控制单元的校准算法对输入信号进行校准,使得手柄能够精确地感知玩家的输入,不需要多次手动调节,满足自动化维修校准的功能,从而达到更加流畅自然的游戏操作效果,具有更好的兼容性和普适性。
技术研发人员:蒋洁
受保护的技术使用者:衡阳鸿运电子有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!