上肢推举训练器及控制、评估方法与流程
本发明涉及训练器材,特别涉及上肢推举训练器及控制方式,属于训练设备。
背景技术:
1、上肢推举器是训练中常用的一种器材,推举训练器从最初的纯机械式已经发展到了机电结合式,如很多推举训练器的配重从最初的机械配重已经发展为电子配重(电机阻力、磁阻力等),还有的推举训练器上集成了心率测定等功能,中国专利申请中也有较多的推举训练器的技术方案公开,但经过申请人调研分析,发现现有的推举训练器在以下方面还不能很好的适应训练的需要:一是目前的上肢推举训练器一般提供的是阻力训练方式,这应用于正常人基本没问题,但使用在康复训练中,由于很多使用者的臂力不佳,在训练的初期需要被动训练或者提供助力,目前的上肢推举训练器无法满足;二是在训练评估方面,目前的推举训练器一般都是采用的间接的方式,如通过最大配重等方式来评估,这种方式是一种间接的评估方式,往往受到设备自身系统性的摩擦力等方面的影响,导致结果不客观;三是在进行训练时,训练的阻力一般都是事先设定,无法根据使用者的训练情况及时的调节,以适应使用者的训练需求。公开专利202221054536 .8 提出了主动模式下阻力训练和助力训练方案,但有如下缺陷:1)人体血氧饱和度下降时,说明人体存在缺氧的情况,为满足身体器官组织的供氧,心脏收缩加快,心率也就随之加快,但是心率血氧传感器和肢体肌力无必然关系,靠该传感器采集心率血氧控制电机驱动做助力训练达不到训练效果;2)由于扭矩传感器设置在电机输出轴处,丝杠传功机构自身的阻力较大且每台设备受制于安装精度影响阻力均不一样,光靠前端的扭矩传感器得到阻力值进行主动训练是不准确的;3)被动训练上肢无需用力,仅需要电机输出合适力矩即可带动训练,不需要扭矩传感器参与,存在设计方面的不周全。
技术实现思路
1、本发明的目的在于克服目前的推举训练设备存在的上述问题,提供一种上肢推举训练器及控制方法。
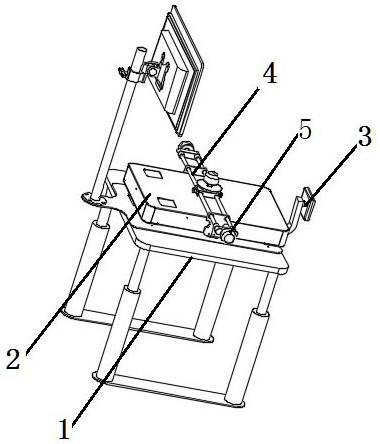
2、为实现本发明的目的,采用了下述的技术方案:上肢推举训练器,包括底板,在底板上固定安装有导轨,导轨上滑动配合设置有滑块,推杆直接或间接固定连接在滑块上,在推杆的两端连接有握手,在底板上一端固定安装有伺服减速机,伺服减速机的输出轴上固定连接有主动同步带轮,在底板上另一端固定安装有被动同步带轮,主动同步带轮和被动同步带轮上绕设有开口式的同步带,所述的开口式同步带的开口两端通过连接板连接,拉压力传感器的一端固定连接在连接板上,推杆与拉压力传感器的另一端之间固定连接,在底板上固定连接有激光测距传感器,推杆上固定连接有与激光测距传感器相配合的激光测距挡板,所述的伺服减速机、拉压力传感器、激光测距传感器均连接至控制器。
3、进一步的;所述的导轨为两道,两个滑块分别滑动配合在导轨上,在两个滑块上分别连接有固定连接有左弯板、右弯板,中间板两端分别通过弹簧销可离合与左弯板、右弯板连接,拉压力传感器固定连接在中间板上,底板上长度方向上安装有丝杠,丝杠上旋接有螺母,螺母通过导孔滑动配合在丝杠旁固定设置的导杆上,螺母上固定连接有霍尔传感器,左弯板或右弯板上固定连接有与霍尔传感器相感应的磁铁,霍尔传感器连接至控制器,在底板上的被动同步带轮一端固定安装有垫块,中间板上固定连接有楔形块,中间板推上去后,楔形块搭接在垫块上。
4、进一步的;所述的底板前端铰接在升降平台上,电动推杆的机身铰接在升降平台上、动作推杆铰接在底板上。
5、进一步的;在底板或升降平台的前端固定连接有l形的胸托板。
6、进一步的;在底板上下两端固定安装有光电开关,在推杆上固定连接有与光电开关感应的触发片,当光电开关感应的触发片触发光电开关时,激光测距挡板不在设定的推举范围内。
7、上肢推举训练器的控制方法,采用上述的上肢推举训练器,使用者主动训练,训练时通过伺服减速机提供训练阻力,首先伺服减速机通过抱闸锁止,使用者握住握手用最大力上推或下拉,通过压力传感器得到最大力值,存储到控制器中作为最大爆发力;伺服减速机提供训练阻力通过以下方法之一训练:
8、方法a:提供恒阻力进行训练,伺服减速机通过设置不同等级的恒定力矩作为训练档位;恒定力矩产生的阻力小于最大爆发力;
9、方法b:恒速训练;在控制器中设定最佳推速,训练开始时设定最大爆发力的50%为阻力初始值,通过伺服减速机内部编码器测得推举速度,若推举速度大于最佳速度,则控制伺服减速机增加阻力值,直至推举速度与最佳速度相等;若推举速度小于最佳速度,则控制伺服减速机降低阻力值,直至推举速度与最佳速度相等。
10、上肢推举训练器的控制方法,采用上述的上肢推举训练器,使用者被动训练,训练时通过伺服减速机带动推杆进行训练,首先伺服减速机通过抱闸锁止,使用者握住握手用最大力上推或下拉,通过压力传感器得到最大力值,存储到控制器中作为最大爆发力;被动训练时,伺服减速机提供恒定的被动训练力,被动训练力为最大爆发力的1.1-1.3倍。
11、进一步的;方法b中,需要增加或减少阻力值时,以50ms变化1n的力补偿方式改变阻力值的大小。
12、进一步的;当训练中出现以下之一控制器控制伺服减速机停止:
13、情况a:激光测距挡板不在设定的推举范围内时;
14、情况b:光电开关感应的触发片触发光电开关时;
15、情况c:伺服减速机的电流大于等于其2倍额定电流时。
16、进一步的;上肢推举训练评估方法,采用上述的上肢推举训练器,其特征在于:评估时,首先制伺服减速机抱闸锁止,训练时通过伺服减速机提供训练阻力,首先伺服减速机通过抱闸锁止,使用者握住握手用最大力上推或下拉,通过压力传感器得到最大力值,存储到控制器中作为最大爆发力,在最大爆发力之下设置多个阻力档位进行推举训练,通过拉压力传感器可以评估相应阻力档位下最大推/拉力,得出设定位移内的单次推举峰力矩、峰力矩时间、最大速率、总做功、平均功率。
17、本发明的积极有益技术效果在于:本发明可以进行主动训练、被动训练、听觉音律刺激训练,且可根据设定的推速自动补偿阻力,拉压力传感器测量直接、准确,能够实现更好的训练效果。
技术特征:
1.上肢推举训练器,包括底板,在底板上固定安装有导轨,导轨上滑动配合设置有滑块,推杆直接或间接固定连接在滑块上,在推杆的两端连接有握手,其特征在于:在底板上一端固定安装有伺服减速机,伺服减速机的输出轴上固定连接有主动同步带轮,在底板上另一端固定安装有被动同步带轮,主动同步带轮和被动同步带轮上绕设有开口式的同步带,所述的开口式同步带的开口两端通过连接板连接,拉压力传感器的一端固定连接在连接板上,推杆与拉压力传感器的另一端之间固定连接,在底板上固定连接有激光测距传感器,推杆上固定连接有与激光测距传感器相配合的激光测距挡板,所述的伺服减速机、拉压力传感器、激光测距传感器均连接至控制器。
2.根据权利要求1所述的上肢推举训练器,其特征在于:所述的导轨为两道,两个滑块分别滑动配合在导轨上,在两个滑块上分别连接有固定连接有左弯板、右弯板,中间板两端分别通过弹簧销可离合与左弯板、右弯板连接,拉压力传感器固定连接在中间板上,底板上长度方向上安装有丝杠,丝杠上旋接有螺母,螺母通过导孔滑动配合在丝杠旁固定设置的导杆上,螺母上固定连接有霍尔传感器,左弯板或右弯板上固定连接有与霍尔传感器相感应的磁铁,霍尔传感器连接至控制器,在底板上的被动同步带轮一端固定安装有垫块,中间板上固定连接有楔形块,中间板推上去后,楔形块搭接在垫块上。
3.根据权利要求1所述的上肢推举训练器,其特征在于:所述的底板前端铰接在升降平台上,电动推杆的机身铰接在升降平台上、动作推杆铰接在底板上。
4.根据权利要求3所述的上肢推举训练器,其特征在于:在底板或升降平台的前端固定连接有l形的胸托板。
5.根据权利要求1所述的上肢推举训练器,其特征在于:在底板上下两端固定安装有光电开关,在推杆上固定连接有与光电开关感应的触发片,当光电开关感应的触发片触发光电开关时,激光测距挡板不在设定的推举范围内。
6.上肢推举训练器的控制方法,采用权利要求1-5任一权利要求所述的上肢推举训练器,其特征在于:使用者主动训练,训练时通过伺服减速机提供训练阻力,首先伺服减速机通过抱闸锁止,使用者握住握手用最大力上推或下拉,通过压力传感器得到最大力值,存储到控制器中作为最大爆发力;伺服减速机提供训练阻力通过以下方法之一训练:
7.上肢推举训练器的控制方法,采用权利要求1-5任一权利要求所述的上肢推举训练器,其特征在于:使用者被动训练,训练时通过伺服减速机带动推杆进行训练,首先伺服减速机通过抱闸锁止,使用者握住握手用最大力上推或下拉,通过压力传感器得到最大力值,存储到控制器中作为最大爆发力;被动训练时,伺服减速机提供恒定的被动训练力,被动训练力为最大爆发力的1.1-1.3倍。
8.根据权利要求6所述的上肢推举训练器的控制方法,采用权利要求5所述的上肢推举训练器,其特征在于:方法b中,需要增加或减少阻力值时,以50ms变化1n的力补偿方式改变阻力值的大小。
9.根据权利要求6或7所述的上肢推举训练器的控制方法,其特征在于:当训练中出现以下之一控制器控制伺服减速机停止:
10.上肢推举训练评估方法,采用权利要求1-5任一权利要求所述的上肢推举训练器,其特征在于:评估时,首先制伺服减速机抱闸锁止,训练时通过伺服减速机提供训练阻力,首先伺服减速机通过抱闸锁止,使用者握住握手用最大力上推或下拉,通过压力传感器得到最大力值,存储到控制器中作为最大爆发力,在最大爆发力之下设置多个阻力档位进行推举训练,通过拉压力传感器可以评估相应阻力档位下最大推/拉力,得出设定位移内的单次推举峰力矩、峰力矩时间、最大速率、总做功、平均功率。
技术总结
上肢推举训练器,包括底板,在推杆的两端连接有握手,在底板上一端固定安装有伺服减速机,伺服减速机的输出轴上固定连接有主动同步带轮,在底板上另一端固定安装有被动同步带轮,主动同步带轮和被动同步带轮上绕设有开口式的同步带,开口式同步带的开口两端通过连接板连接,拉压力传感器的一端固定连接在连接板上,推杆与拉压力传感器的另一端之间固定连接,上肢推举训练器的控制方法,采用上述的上肢推举训练器,使用者主动训练,训练时通过伺服减速机提供训练阻力,首先伺服减速机通过抱闸锁止,使用者握住握手用最大力上推或下拉,通过压力传感器得到最大力值,存储到控制器中作为最大爆发力;本发明能够实现更好的训练效果。
技术研发人员:何永正,王光旭,史鹏鹏,樊永言,董鸣彦,牛国林
受保护的技术使用者:河南省祥和康复产业技术研究院有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!