一种新型三轴体感模拟器及其控制系统的制作方法
本发明涉及赛车游戏体感模拟、飞行游戏体感模拟以及vr游戏体感模拟,更具体地说,本发明涉及一种新型三轴体感模拟器及其控制系统。
背景技术:
1、三轴体感模拟器是一种设备或系统,用于模拟三维空间中的运动和姿态感应,通常应用于飞行模拟器、游戏控制器、航天模拟、医学和康复、机器人控制等领域,更多地被应用于游戏领域,通过戴上vr头盔和使用三轴体感控制器来互动。这些控制器可以模拟玩家的手部运动和空间定位,使他们能够在虚拟环境中自由移动、抓取物体并进行各种互动操作,在游戏领域,三轴体感模拟器的应用不仅丰富了游戏体验,还提供了更具挑战性和互动性的游戏方式。
2、现有技术存在以下不足:现有技术在模拟体感时,一般使用电动推杆加伺服电机来模拟游戏姿态,这样使设备的尺寸变大,使生产成本提高,体验动感的幅度小,对于动感算法的要求也比较高;另外,若是三轴体感模拟器的模拟效果出现问题,不能及时地发现提醒,将大大降低用户的体验效果,甚至还有可能产生危险。
3、为了解决上述两个缺陷,现提供一种技术方案。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种新型三轴体感模拟器及其控制系统以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
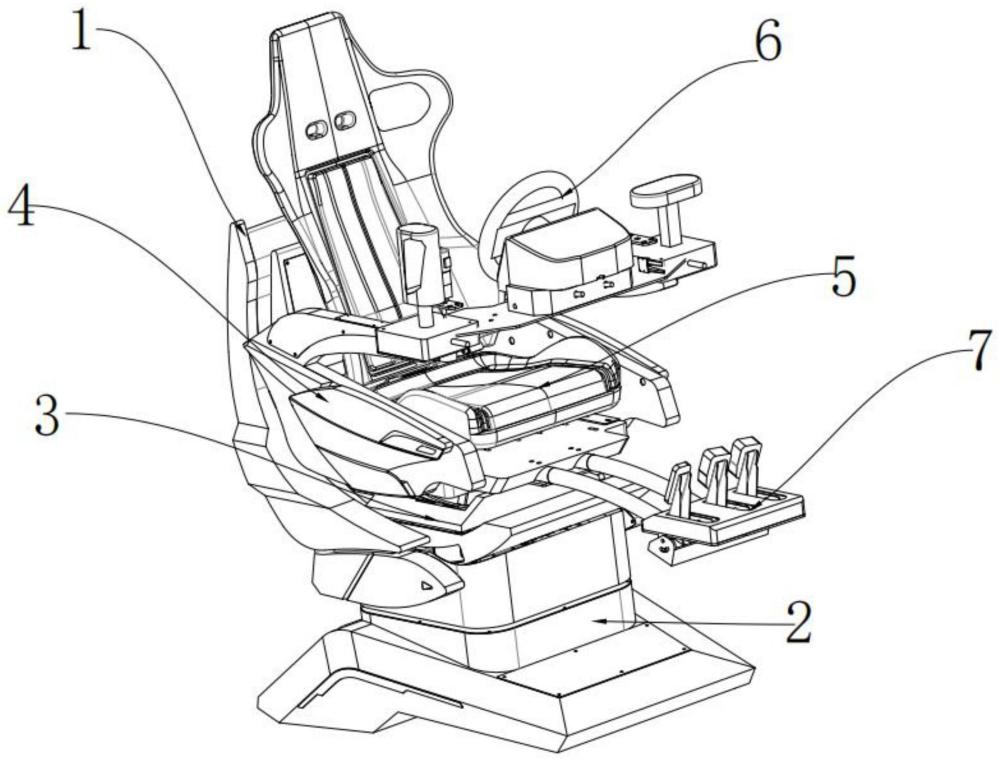
3、一种新型三轴体感模拟器,包括三轴体感模拟器本体,其特征在于:所述三轴体感模拟器本体内部设置有旋转底盘、前后滚动结构、左右滚动结构、底盘旋转信息采集模块、前后滚动架滚动信息采集模块、左右滚动架旋转信息采集模块、控制器;
4、旋转底盘:所述旋转底盘包括旋转柱、底盘减速机,所述旋转柱固定在底盘减速机的顶部,所述旋转柱通过旋转带动前后滚动结构与左右滚动结构转动;
5、前后滚动结构:所述前后滚动结构固定在旋转底盘的上方,所述滚动结构包括前后滚动主动轮,所述前后滚动主动轮滚动带动前后滚动结构与左右滚动结构一起上下滚动;
6、左右滚动结构:所述左右滚动结构固定在前后滚动结构上方,所述左右滚动结构包括左右滚动主动轮,所述左右滚动主动轮滚动带动座椅和游戏操作杆一起左右滚动;
7、底盘旋转信息采集模块:安装在旋转底盘内部,用于采集底盘实际的旋转角度;
8、前后滚动架滚动信息采集模块:安装在前后滚动结构内部,用于采集前后滚动架前后滚动的实际角度;
9、左右滚动架旋转信息采集模块:安装在左右滚动结构内部,用于采集左右滚动架左右滚动的实际角度;
10、控制器:所述控制器的输入端设置与底盘旋转信息采集模块、前后滚动架滚动信息采集模块、左右滚动架旋转信息采集模块的输出端电性连接,生成控制指令,控制三轴体感模拟器本体的旋转状态。
11、在一个优选的实施方式中,所述旋转底盘包括旋转底盘骨架,所述旋转底盘骨架的表面固定有底盘电机,所述底盘电机与底盘减速机固定连接,所述底盘减速机的顶部转动连接有旋转柱,所述旋转柱的顶部设置有导电环,所述导电环的一侧设置有底盘旋转信息采集模块,所述旋转柱的顶部连接有前后滚动结构,所述前后滚动结构包括前后滚动主动同步轮,所述前后滚动主动同步轮的上方设置有前后滚动同步带,所述前后滚动主动同步轮的一侧设置有前后滚动电机,所述前后滚动电机的底部设置有旋转辅助轴承,所述前后滚动主动同步轮的另一侧设置有前后滚动架滚动信息采集模块,所述前后滚动架滚动信息采集模块的一侧设置有前后滚动从动轮,所述前后滚动从动轮的一侧设置有前后滚动压紧轮,所述前后滚动压紧轮的外部设置有前后滚动骨架,所述前后滚动骨架的上方设置有左右滚动结构,所述左右滚动结构包括左右滚动电机,所述左右滚动电机顶部设置有左右滚动压紧轮,所述左右滚动压紧轮的顶部设置有左右滚动主动同步轮,所述左右滚动主动同步轮上方设置有左右滚动同步带,所述左右滚动主动同步轮的一侧设置有左右滚动架旋转信息采集模块,所述左右滚动架旋转信息采集模块的顶部设置有左右滚动从动轮。
12、在一个优选的实施方式中,包括采集模块、处理模块、对比模块以及报警模块;
13、采集模块,采集新型三轴体感模拟器在运行过程中的运行状态信息,包括自身设备参数信息和外界环境信息,采集后,采集模块将采集的自身设备参数信息和外界环境信息传递至处理模块;
14、自身设备参数信息包括旋转角度偏差系数qw,外界环境信息包括数据传输延迟系数ly;
15、处理模块:将采集模块上传的数据进行处理,并建立数据处理模型,生成评估系数,并将评估系数传递至对比模块;
16、对比模块:将生成的评估系数与评估系数阈值进行比较,并将比较的结果传递至报警模块;
17、报警模块:根据对比模块上传的结果生成报警信号。
18、在一个优选的实施方式中,所述旋转角度偏差系数qw包括底盘旋转角度偏差系数、前后旋转角度偏差系数、左右旋转角度偏差系数,所述底盘旋转角度偏差系数的获取逻辑为:
19、s1、获取在t时间内不同时刻的底盘实际的旋转角度与对应的预设的底盘的旋转角度,并将底盘实际的旋转角度与对应的预设的底盘的旋转角度标记为e实t和e预t,t表示在t时间内不同时刻的底盘实际的旋转角度与对应的预设的底盘的旋转角度的编号,t=1、2、3、4、……、n,n为正整数;
20、s2、将底盘实际的旋转角度e实t与对应的预设的底盘的旋转角度e预t进行处理,将处理的结果标记为e处t,其中e处t=|e实t-e预t|,并将处理的结果进行编号,t=1、2、3、4、……、n,n为正整数;
21、s3、计算底盘旋转角度偏差系数,计算的表达式为:式中,qs为底盘旋转角度偏差系数。
22、在一个优选的实施方式中,
23、所述前后旋转角度偏差系数的获取逻辑为:
24、s1、获取前后滚动架预设的前后滚动的角度的范围,并将这个范围标记为[sc,sd],其中,sc<sd,
25、s2、获取在t时间内不同时刻的前后滚动架前后滚动的实际角度与对应的预设的滚动角度,并将前后滚动架前后滚动的实际角度与对应的预设的滚动角度标记为s实a和s预a,a表示在t时间内不同时刻的前后滚动架前后滚动的实际角度与对应的预设的滚动角度的编号,a=1、2、3、4、……、m,m为正整数;
26、s3、将前后滚动架前后滚动的实际角度s实a进行集合,并将集合标记为z,z={s实a}={s实a1、s实a2、s实a3、…、s实am},m为正整数,将前后滚动架前后滚动的实际角度对应的预设的滚动角度标s预a进行集合,并将集合标记为q,q={s预a}={s预a1、s预a2、s预a3、…、s预am};
27、s4、将集合z的数值与范围[sc,sd]进行对比,并找出集合z中不在范围[sc,sd]之内的数值,把它们剔除,并将处于范围[sc,sd]之内的数值重新进行标记,标记为r新d,并将r新d对应的预设的前后滚动架前后滚动的角度标记为r预d,d表示在t时间内不同时刻的前后滚动架前后滚动的实际角度在预设的范围之内的角度与对应的预设的前后滚动架前后滚动的角度的编号,d=1、2、3、4、……、f,f为正整数;
28、s5、计算前后旋转角度偏差系数,计算的表达式为:
29、
30、式中,ws为前后旋转角度偏差系数。
31、在一个优选的实施方式中,
32、所述左右旋转角度偏差系数获取的逻辑如下:
33、s1、获取左右滚动架预设的左右旋转的角度的范围,并将这个范围标记为[ys-yf,ys+yf],式中,yf<ys;
34、s2、获取在t时间内不同时刻的左右滚动架左右旋转的实际角度与对应的预设的滚动角度,并将左右滚动架左右旋转的实际角度与对应的预设的滚动角度标记为g实k和g预k,k表示在t时间内不同时刻的左右滚动架左右旋转的实际角度与对应的预设的滚动角度的编号,k=1、2、3、4、……、w,w为正整数;
35、s3、将左右滚动架左右旋转的实际角度g实k进行集合,并将集合标记为gh,gh={g实k}={g实k1、g实k2、g实k3、…、g实kw},w为正整数,将左右滚动架左右旋转的实际角度对应的预设的滚动角度标g预k进行集合,并将集合标记为gk,gk={g预k}={g预k1、g预k2、g预k3、…、g预kw};
36、s4、将集合gh的数值与范围[ys-yf,ys+yf]进行对比,并找出集合gh中不在范围[ys-yf,ys+yf]之内的数值,并将这些数值剔除,将剩余的数值重新标记为h实x,x=1、2、3、4、……、j,j为正整数,并把h实x与之对应的集合gk的数据标记为h预x,x=1、2、3、4、……、j,j为正整数;
37、s5、计算左右旋转角度偏差系数,计算的表达式为:
38、
39、式中,st为前后旋转角度偏差系数,为处于[ys-yf,ys+yf]范围内的左右滚动架实际滚动的角度h实x的平均值,获取的表达式为:为处于[ys-yf,ys+yf]范围内的左右滚动架实际滚动的角度对应的预设的角度h预x的平均值,获取的表达式为:
40、在一个优选的实施方式中,
41、所述旋转角度偏差系数qw的表达式为:
42、qw=a1qs+a2ws+a3st
43、式中,a1、a2、a3分别为底盘旋转角度偏差系数、前后旋转角度偏差系数、左右旋转角度偏差系数的预设比例系数,且a1、a2、a3均大于0。
44、在一个优选的实施方式中,所述数据传输延迟系数的获取的逻辑如下:
45、s1、获取在t时间内不同时刻的控制系统下发指令个数,并标记为b发u,u表示在t时间内不同时刻的控制系统下发指令个数的编号,u=1、2、3、4、……、m,m为正整数;
46、s2、获取在t时间内三轴体感模拟器接受的指令个数,并标记为b接c,c表示在t时间内三轴体感模拟器接受指令个数的编号,c=1、2、3、4、……、n,n为正整数;
47、s3、获取在t时间内三轴体感模拟器实现的指令个数,并标记为b实l,l表示在t时间内三轴体感模拟器实现的指令个数的编号,l=1、2、3、4、……、f,f为正整数;
48、s4、获取t时间内三轴体感模拟器实现的指令的发送时间、接受时间、实现时间,分别标记为v表示三轴体感模拟器实现的指令的发送时间、接受时间、实现时间的编号,v=1、2、3、4、……、r,r为正整数;
49、s5、计算数据传输延迟系数,表达式为:
50、
51、在一个优选的实施方式中,所述评估系数的表达式为:
52、
53、式中,z为评估系数,b1、b2分别为旋转角度偏差系数qw与数据传输延迟系数ly预设的比例系数,且b1、b2大于0。
54、本发明的技术效果和优点:
55、1、本发明中通过设置旋转底盘、前后滚动结构、左右滚动结构,结构简单,便于制造,通过旋转底盘、前后滚动结构、左右滚动机构的结构设置节省了外置电动推杆,减小设备空间大小,增大模拟的角度,简化了体感算法,从而降低了生产成本。
56、2、本发明中,通过采集旋转角度偏差系数、外界环境信息包括数据传输延迟系数建立评估系数,将得到的评估系数与评估系数阈值进行对比,若评估系数大于评估系数阈值,表示此时该三轴体感模拟器的模拟效果不好,用户的体感效果不好,需要及时报警提醒工作人员此三轴体感模拟器效果不好,需要进行及时维修和更换;若评估系数小于评估系数阈值,证明该三轴体感模拟器的模拟效果良好,可以继续提供给用户使用,不需要进行任何处理。
- 还没有人留言评论。精彩留言会获得点赞!