虚拟对象的肌肉控制方法及装置、存储介质、电子设备与流程
本公开涉及计算机,尤其涉及一种虚拟对象的肌肉控制方法与虚拟对象的肌肉控制装置、计算机可读存储介质及电子设备。
背景技术:
1、在游戏品质日益提升的情况下,玩家对游戏体验的要求也越来越高。举例而言,目前市面上的大多数射击游戏并没有使用人体肌肉自动修型技术,人物在持枪姿态和蹲姿的时候关节处和臀部的形体会丢失和穿帮,导致无法真实还原写实人物的效果,对玩家的体验大打折扣。
2、目前部分游戏项目中使用了blendshape(融合变形器)的方式来解决这个问题,但是在这种方式下需要预先制作出人物的变形姿态,这不仅提升了制作成本,还增加了引擎的能耗。
3、鉴于此,本领域亟需开发一种新的虚拟对象的肌肉控制方法及装置。
4、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本公开的目的在于提供一种虚拟对象的肌肉控制方法、虚拟对象的肌肉控制装置、计算机可读存储介质及电子设备,进而至少在一定程度上克服由于相关技术导致制造成本提升、引擎能耗大的问题。
2、本公开的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本公开的实践而习得。
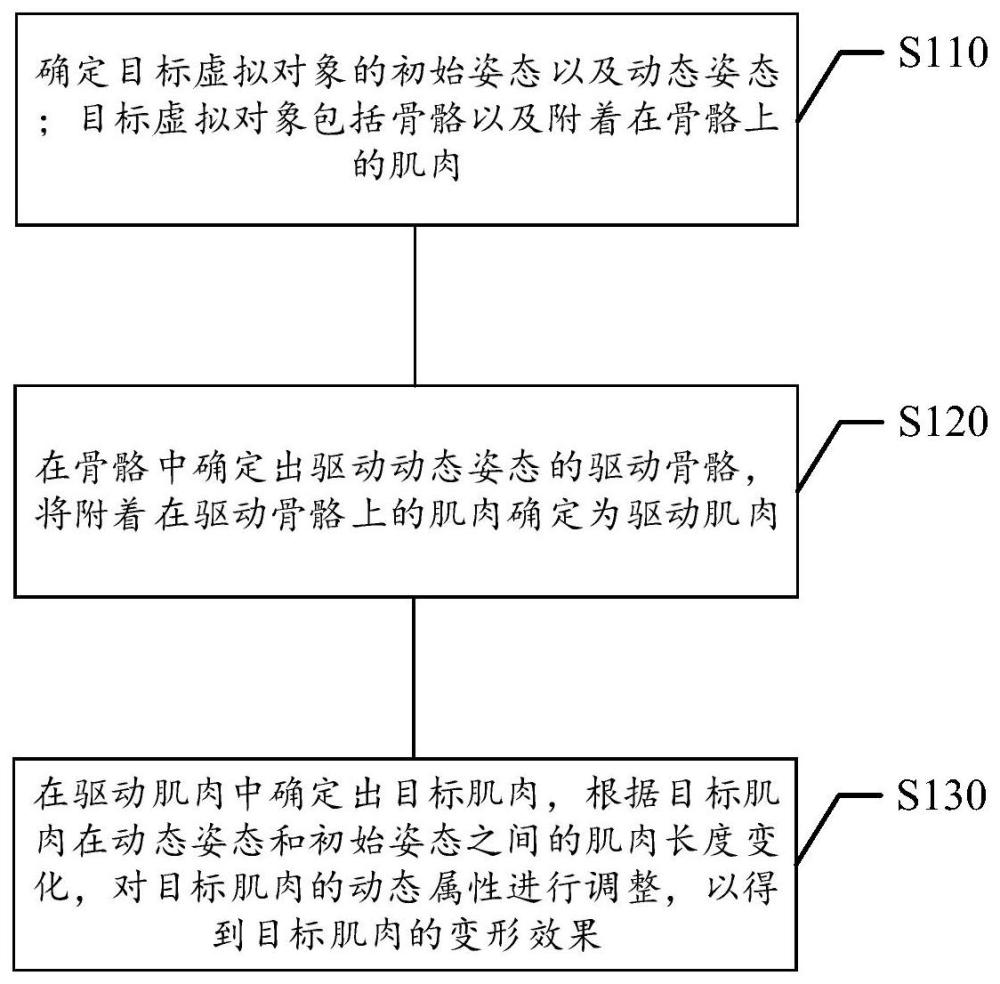
3、根据本发明实施例的第一个方面,提供一种虚拟对象的肌肉控制方法,所述方法包括:确定目标虚拟对象的初始姿态以及动态姿态;所述目标虚拟对象包括骨骼以及附着在所述骨骼上的肌肉;在所述骨骼中确定出驱动所述动态姿态的驱动骨骼,将附着在所述驱动骨骼上的肌肉确定为驱动肌肉;在驱动肌肉中确定出目标肌肉,根据所述目标肌肉在所述动态姿态和所述初始姿态之间的肌肉长度变化,对所述目标肌肉的动态属性进行调整,以得到所述目标肌肉的变形效果。
4、根据本发明实施例的第二个方面,提供一种虚拟对象的肌肉控制装置,所述装置包括:姿态确定模块,被配置为确定目标虚拟对象的初始姿态以及动态姿态;所述目标虚拟对象包括骨骼以及附着在所述骨骼上的肌肉;驱动肌肉确定模块,被配置为在所述骨骼中确定出驱动所述动态姿态的驱动骨骼,将附着在所述驱动骨骼上的肌肉确定为驱动肌肉;肌肉变形模块,被配置为在驱动肌肉中确定出目标肌肉,根据所述目标肌肉在所述动态姿态和所述初始姿态之间的肌肉长度变化,对所述目标肌肉的动态属性进行调整,以得到所述目标肌肉的变形效果。
5、根据本发明实施例的第三个方面,提供一种电子设备,包括:处理器和存储器;其中,存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时实现上述任意示例性实施例的虚拟对象的肌肉控制方法。
6、根据本发明实施例的第四个方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任意示例性实施例中的虚拟对象的肌肉控制方法。
7、由上述技术方案可知,本发明示例性实施例中的虚拟对象的肌肉控制方法、虚拟对象的肌肉控制装置、计算机存储介质及电子设备至少具备以下优点和积极效果:
8、在本公开的示例性实施例提供的方法及装置中,根据目标肌肉在动态姿态和初始姿态之间的肌肉长度变化,对目标肌肉的动态属性进行调整,以达到目标肌肉的变形效果。一方面,该方式适用于裸模以及其他具备皮肤的目标虚拟对象,提高了肌肉变形的通用性,降低了设计过程中所需要消耗的资源量,降低了引入引擎的难度;另一方面,在对目标肌肉进行变形的过程中,无需针对目标虚拟对象预先制作出大量的变形姿态,不仅减少了制作成本,还降低了引擎的能耗,进而可以在有限的资源和最低的能耗下达到最优的肌肉变形效果。
9、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种虚拟对象的肌肉控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述目标肌肉在所述动态姿态和所述初始姿态之间的肌肉长度变化,对所述目标肌肉的动态属性进行调整,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述初始距离和所述动态距离之间的变化,对所述目标肌肉的动态属性进行调整,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述动态距离、所述初始距离以及所述肌肉动态调整参数确定出目标调整值,包括:
5.根据权利要求2所述的方法,其特征在于,若所述目标肌肉为膝盖处的肌肉,所述目标肌肉的两端分别为所述目标虚拟对象的盆骨中心位置以及所述膝盖所在位置。
6.根据权利要求1所述的方法,其特征在于,所述目标肌肉的动态属性包括伸缩属性、颤动属性以及挤压属性中的一个或多个。
7.根据权利要求1所述的方法,其特征在于,所述确定目标虚拟对象的初始姿态以及动态姿态之前,所述方法还包括:
8.一种虚拟对象的肌肉控制装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-7中的任意一项所述的虚拟对象的肌肉控制方法。
技术总结
本公开属于计算机技术领域,涉及一种虚拟对象的肌肉控制方法及装置、计算机存储介质、电子设备。该方法包括:确定目标虚拟对象的初始姿态以及动态姿态;目标虚拟对象包括骨骼以及附着在骨骼上的肌肉;在骨骼中确定出驱动动态姿态的驱动骨骼,将附着在驱动骨骼上的肌肉确定为驱动肌肉;在驱动肌肉中确定出目标肌肉,根据目标肌肉在动态姿态和初始姿态之间的肌肉长度变化,对目标肌肉的动态属性进行调整,以得到目标肌肉的变形效果。在本公开中,根据目标肌肉在动态姿态和初始姿态之间的肌肉长度变化,对目标肌肉的动态属性进行调整,在目标肌肉变形的过程中,无需针对目标虚拟对象制作大量的变形姿态,减少了制作成本,避免了不必要的性能损耗。
技术研发人员:张宇豪
受保护的技术使用者:网易(杭州)网络有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!