一种高尔夫智能捡球机器人的制作方法
本技术涉及高尔夫运动,具体为一种高尔夫智能捡球机器人。
背景技术:
1、高尔夫练习场简单来说就是用于球手在指定的场地内练习击球的场所,只需要不断地发球就可以了,这种练习场中是有专门的捡球人员开着车去捡球的,在此之前高尔夫球场上工人驾驶高尔夫球车捡拾高尔夫球,满地高尔夫球需要人工驾驶铁网封闭的球车捡球,有一定的安全隐患,而且工人还需要掌握一定的驾驶技术才能驾驶高尔夫球车,工作群体也相对局限。
技术实现思路
1、本实用新型的目的在于提供一种高尔夫智能捡球机器人,以解决上述背景技术中提出的问题。
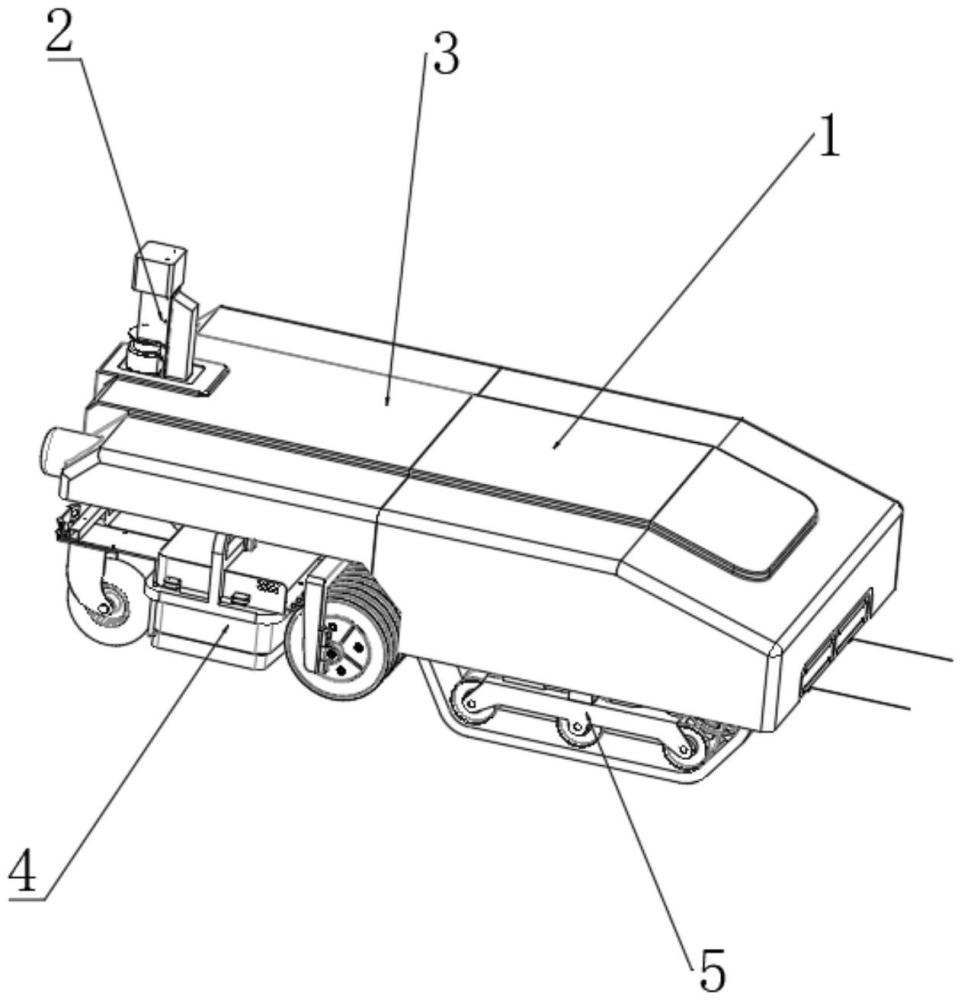
2、为实现上述目的,本实用新型提供如下技术方案:一种高尔夫智能捡球机器人,包括设备主体,所述设备主体包括:
3、车架,所述车架上设置有车壳;
4、用于进行高尔夫球捡球的捡球机头,所述捡球机头设置于车架上;以及
5、用于驱动设备主体移动的履带动力件,所述履带动力件设置于车架上。
6、进一步地,所述车架包括架梁,所述架梁包括横梁,所述横梁的顶端设置有多组与车壳对应的安装架,所述横梁的底端左侧设置有与捡球机头对应的转动接头,所述横梁的底端右侧向下设置有延伸架,所述延伸架远离横梁的一端设置有安装杆,所述安装杆的前后两端设置有与履带动力件对应的车架轴承座。
7、进一步地,所述车架还包括激光系统,所述激光系统包括设置于横梁顶端左侧的激光雷达,所述激光雷达的顶端还设置有视觉摄像头。
8、进一步地,所述车壳包括前壳,所述前壳设置于横梁的顶端左侧,所述前壳通过安装架与横梁连接,所述前壳上设置有与激光系统对应的适配口,所述前壳的左端设置有前超声波雷达。
9、进一步地,所述前壳的右侧设置有后壳,所述后壳通过安装架与横梁的顶端右侧连接,所述后壳的右端设置有后超声波雷达。
10、进一步地,所述捡球机头包括导向件,所述导向件包括转动连接于转动接头内的球型接头,所述球型接头的底端设置有转动架,所述转动架的顶端设置有延伸杆,所述延伸杆的底端前后对称设置有两组导向轮,所述转动架的后端设置有连接架,所述连接架的顶端设置有挑架,所述挑架的后端前后对称设置有两组捡球轴承座。
11、进一步地,所述连接架内设置有收球件,所述收球件包括收球箱,所述收球箱设置于连接架的内侧,所述收球箱的顶端开放式设置,所述收球箱的底端呈v型向下凸出,所述收球箱的底端一侧设置有放出口,所述放出口的一侧设置有丝杆驱动箱,所述丝杆驱动箱的输出端向放出口方向设置有与放出口对应的自动门,所述收球箱的右端中间位置设置有v型分球板,所述收球箱的顶端右侧前后对称设置有多组倒球片。
12、进一步地,所述捡球机头还包括捡球件,所述捡球件前后对称设置有两组,所述捡球件包括转动连接于捡球轴承座上的转动臂,所述转动臂上设置有与捡球轴承座对应的轴接头,所述转动臂的右端向下设置有u型支臂,所述u型支臂的顶端通过固定套固定连接于转动臂上,所述u型支臂的右端前后对称设置有两组转动轴承座,前后两组所述转动轴承座之间设置有捡球轮,所述捡球轮包括多组前后均匀排布的捡球夹片,所述倒球片延伸至捡球夹片之间,所述捡球夹片的轴心位置设置有安装轴,所述安装轴转动连接于转动轴承座上。
13、进一步地,所述履带动力件包括固定连接于车架轴承座底端的安装板,所述安装板的顶端设置有动力电池,所述安装板的底端设置有固定架,所述固定架的前后两端对称设置有两组履带轮,所述固定架的顶端前后对称设置有两组履带电机,所述履带电机的输出端设置有变速箱,所述变速箱的输出端与履带轮连接。
14、进一步地,所述固定架的顶端前后对称设置有支撑架,所述支撑架的顶端设置有安装框,所述安装框内设置有捡球控制组件,两组所述支撑架的右端设置有后延臂,所述后延臂的后端设置有后板,所述后板的右端设置有红外对位传感器。
15、与现有技术相比,本实用新型的有益效果是:
16、1、本机器人具有智能捡球功能,通过设置高尔夫智能捡球机器人,其在使用过程中,能够自动识别高尔夫球散落位置,进行有选择性捡球、以及自动完成整个捡球过程的设备控制器,可高效率,高强度,高时长进行自动捡球回收球、实现节省人力物力,降低捡球成本的效果,并且设备维护简单,自动运行,省时省力省心;
17、2、本机器人具有自动壁障功能,通过前后两颗超声波雷达的配合,使其不会撞上障碍物,并且能自动判断与障碍物之间的距离;
18、3、本机器人具有学习功能,机器人内部设置有控制芯片,通过与手机联动,可以自动学习规划捡球线路,并且可以通过app实时监控进度;
19、4、本机器人具有自动充电功能,通过设置的红外对位传感器,在控制芯片检测到电量不足时,可以自动返回设置好的充电桩位置,通过红外对位传感器,可自动倒车至充电桩处,进行电力补充。
技术特征:
1.一种高尔夫智能捡球机器人,包括设备主体(1),其特征在于:所述设备主体(1)包括:
2.根据权利要求1所述的一种高尔夫智能捡球机器人,其特征在于:所述前壳(31)的右侧设置有后壳(33),所述后壳(33)通过安装架(213)与横梁(211)的顶端右侧连接,所述后壳(33)的右端设置有后超声波雷达(331)。
3.根据权利要求2所述的一种高尔夫智能捡球机器人,其特征在于:所述捡球机头(4)包括导向件(42),所述导向件(42)包括转动连接于转动接头(212)内的球型接头(421),所述球型接头(421)的底端设置有转动架(422),所述转动架(422)的顶端设置有延伸杆(4221),所述延伸杆(4221)的底端前后对称设置有两组导向轮(424),所述转动架(422)的后端设置有连接架(423),所述连接架(423)的顶端设置有挑架(4231),所述挑架(4231)的后端前后对称设置有两组捡球轴承座(4232)。
4.根据权利要求3所述的一种高尔夫智能捡球机器人,其特征在于:所述连接架(423)内设置有收球件(41),所述收球件(41)包括收球箱(411),所述收球箱(411)设置于连接架(423)的内侧,所述收球箱(411)的顶端开放式设置,所述收球箱(411)的底端呈v型向下凸出,所述收球箱(411)的底端一侧设置有放出口(4111),所述放出口(4111)的一侧设置有丝杆驱动箱(413),所述丝杆驱动箱(413)的输出端向放出口(4111)方向设置有与放出口(4111)对应的自动门(414),所述收球箱(411)的右端中间位置设置有v型分球板(4112),所述收球箱(411)的顶端右侧前后对称设置有多组倒球片(412)。
5.根据权利要求4所述的一种高尔夫智能捡球机器人,其特征在于:所述捡球机头(4)还包括捡球件(43),所述捡球件(43)前后对称设置有两组,所述捡球件(43)包括转动连接于捡球轴承座(4232)上的转动臂(431),所述转动臂(431)上设置有与捡球轴承座(4232)对应的轴接头(4311),所述转动臂(431)的右端向下设置有u型支臂(432),所述u型支臂(432)的顶端通过固定套(4321)固定连接于转动臂(431)上,所述u型支臂(432)的右端前后对称设置有两组转动轴承座(4322),前后两组所述转动轴承座(4322)之间设置有捡球轮(433),所述捡球轮(433)包括多组前后均匀排布的捡球夹片(4331),所述倒球片(412)延伸至捡球夹片(4331)之间,所述捡球夹片(4331)的轴心位置设置有安装轴(4332),所述安装轴(4332)转动连接于转动轴承座(4322)上。
6.根据权利要求1所述的一种高尔夫智能捡球机器人,其特征在于:所述履带动力件(5)包括固定连接于车架轴承座(216)底端的安装板(51),所述安装板(51)的顶端设置有动力电池(52),所述安装板(51)的底端设置有固定架(53),所述固定架(53)的前后两端对称设置有两组履带轮(56),所述固定架(53)的顶端前后对称设置有两组履带电机(54),所述履带电机(54)的输出端设置有变速箱(55),所述变速箱(55)的输出端与履带轮(56)连接。
7.根据权利要求6所述的一种高尔夫智能捡球机器人,其特征在于:所述固定架(53)的顶端前后对称设置有支撑架(531),所述支撑架(531)的顶端设置有安装框(533),所述安装框(533)内设置有捡球控制组件,两组所述支撑架(531)的右端设置有后延臂(532),所述后延臂(532)的后端设置有后板(534),所述后板(534)的右端设置有红外对位传感器(535)。
技术总结
本技术涉及高尔夫运动技术领域,公开了一种高尔夫智能捡球机器人,包括设备主体,所述设备主体包括:车架,所述车架上设置有车壳;用于进行高尔夫球捡球的捡球机头,所述捡球机头设置于车架上;以及用于驱动设备主体移动的履带动力件,所述履带动力件设置于车架上;通过设置高尔夫智能捡球机器人,其在使用过程中,能够自动识别高尔夫球散落位置,进行有选择性捡球、以及自动完成整个捡球过程的设备控制器,可高效率,高强度,高时长进行自动捡球回收球、实现节省人力物力,降低捡球成本的效果,并且设备维护简单,自动运行,省时省力省心。
技术研发人员:龚明,龚俊修
受保护的技术使用者:珠海市科箭自动化设备有限公司
技术研发日:20230602
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!