网球训练机器人智能学习调整系统的制作方法
本发明涉及网球训练设备,具体涉及网球训练机器人智能学习调整系统。
背景技术:
1、近年来网球在国内的发展进入了快速发展的阶段,越来越多的人开始接触并参与到网球运动的训练中,网球训练中的一个关键点就是训练人员击球的基本动作,比如发球练习和击球练习。
2、现有技术中为了满足单人训练的需求,出现了各种网球训练器。现有的公开的cn206577345u的一种网球发球机,该专利提出的网球发球装置可以实现发球功能,但是局限性很大,只能发射某一固定方向上固定力度的弹道球,无法实现带有旋转的技巧球,无法预判来球的落点,进而评估对练运动员的等级,从而无法针对性的跑位发球,训练目的局限。
技术实现思路
1、为解决发球方式局限的问题,本发明提供一种网球训练机器人,根据来球数据,实现对应级别的运动走位发球和模拟回球。
2、本发明提供如下技术方案:
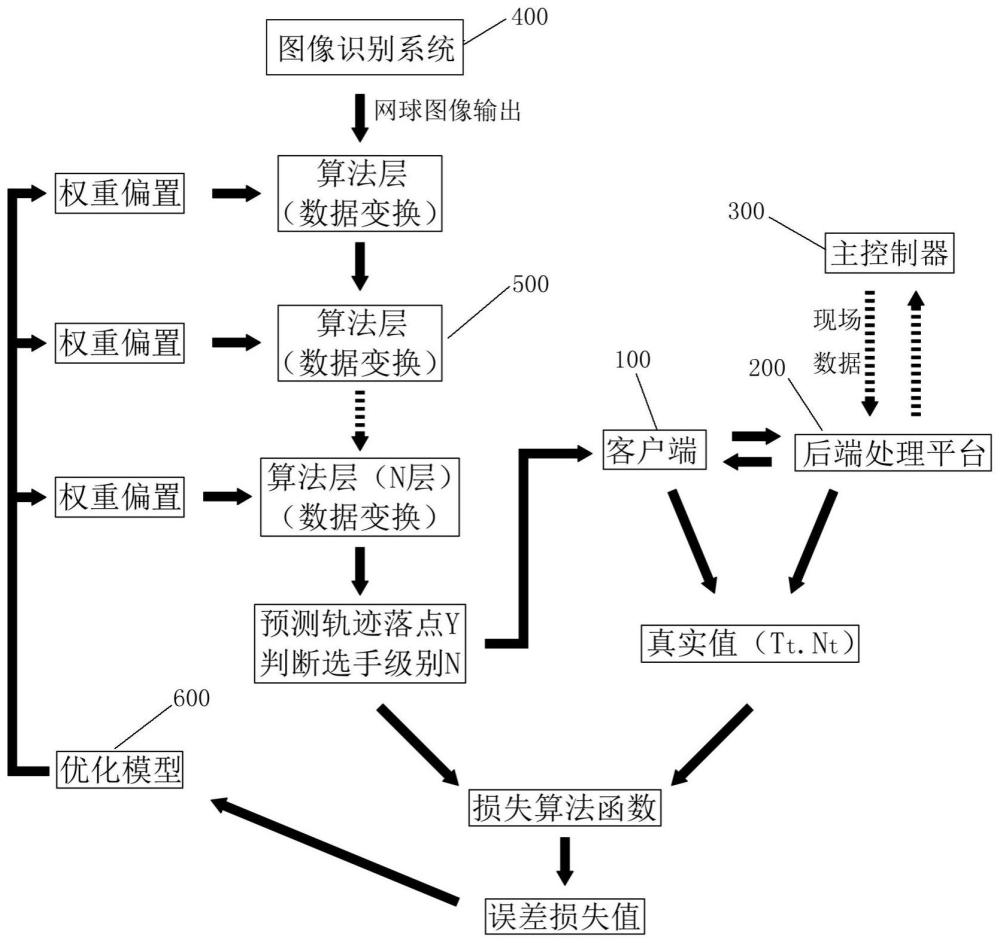
3、网球训练机器人智能学习调整系统,包括图像识别系统、算法模型、后端处理平台和优化模型,
4、图像识别系统,捕捉网球运行中的多点三维坐标、速度、速度方向,运用算法模型计算出来球的轨迹,预判来球的落点;后续捕捉轨迹提供后端研判真实落点;
5、算法模型,具有多层算法层,根据图像识别系统输入的网球图像数据,根据数据的特征进行预测和分类;
6、后端处理平台,经算法层数据变换运算的来球轨迹落点和运动员级别数据,与后端处理平台接收主控制器发来的现场后续数据,手机app客户端数据真实值,计算模型运算出判断数据与真实数据的误差损失值,来反馈给优化模型进行数据优化,从而提高系统的预判能力;
7、优化模型,根据球员击球数据的积累以及判断准确与否信息的反馈,扩充完善数据库,提供模型训练和评估函数,使训练机器人能够自主地评估其在任务上的表现,通过提取的评估特征,优化算法。
8、数据的特征:由于运动中的网球常带有旋转,运行轨迹呈一定方向的偏转,算法模型将根据球运动的空间上的两点与理想情况下的对应两点作比较,判断球属于哪类的旋转类型,根据特定的旋转类型,预判飞行轨迹和落点。
9、预测和分类通过对来球数据预处理工作,收集网球运动员击球后每次球员的位置,出球的角度,网球飞行中速度,方向,旋转,落点的各种必要数据,运用学习算法处理各种数据集,并产生有效的预测和决策,预判来球的落点和难度等级判断,从而评估对练运动员的能力水平和级别判定。
10、所述误差损失值由损失算法函数得来,后端处理平台接收主控制器发来的现场后续数据,手机app客户端数据真实值,与预判的来球轨迹落点、运动员的级别,得出损失算法函数。
11、该学习调整系统通过学习得到输入与输出的映射关系,整个网球训练机器人的训练过程不断更新权重、偏置值。
12、与现有技术相比,本发明的有益效果是:本发明的机器人智能学习系统建有学习算法模型,通过对数据清洗、特征提取、数据标准化等数据预处理工作,逐步收集网球运动员击球后每次网球飞行中速度,方向,旋转,落点等各种必要数据,运用各类机器学习算法,处理各种数据集,并产生有效的预测和决策,预判来球的落点和难度等级判断,从而评估对练运动员的能力水平和级别判定,训练机器人因此做出判断和识别,做出及时交互的反馈动作。整个训练过程不断更新权重、偏置值,使得模型预测越来越准确,网球训练机器人能够提供交互式的智能化训练方式。
技术特征:
1.网球训练机器人智能学习调整系统,其特征在于:包括图像识别系统(400)、算法模型(500)、后端处理平台(200)和优化模型(600),
2.根据权利要求1所述的网球训练机器人智能学习调整系统,其特征在于:数据的特征:由于运动中的网球常带有旋转,运行轨迹呈一定方向的偏转,算法模型将根据球运动的空间上的两点与理想情况下的对应两点作比较,判断球属于哪类的旋转类型,根据特定的旋转类型,预判飞行轨迹和落点。
3.根据权利要求1所述的网球训练机器人智能学习调整系统,其特征在于:预测和分类:通过对来球数据预处理工作,收集网球运动员击球后每次球员的位置,出球的角度,网球飞行中速度,方向,旋转,落点的各种必要数据,运用学习算法处理各种数据集,并产生有效的预测和决策,预判来球的落点和难度等级判断,从而评估对练运动员的能力水平和级别判定。
4.根据权利要求1所述的网球训练机器人智能学习调整系统,其特征在于:所述误差损失值由损失算法函数得来,后端处理平台接收主控制器(300)发来的现场后续数据,手机app(100)客户端数据真实值,与预判的来球轨迹落点、运动员的级别,得出损失算法函数。
5.根据权利要求1所述的网球训练机器人智能学习调整系统,其特征在于:
技术总结
本发明公开了网球训练机器人智能学习调整系统,网球训练机器人智能学习调整系统,包括图像识别系统、算法模型、后端处理平台和优化模型。通过对数据清洗、特征提取、数据标准化等数据预处理工作,逐步收集网球运动员接击球后每次球员的位置,出球的角度,网球飞行中速度,方向,旋转,落点等各种必要数据,运用各类机器学习算法,处理各种数据集,并产生有效的预测和决策,预判来球的落点和难度等级判断,从而评估对练运动员的能力水平和级别判定,训练机器人因此做出判断和识别,做出及时交互的反馈动作。整个训练过程不断更新权重、偏置值,使得模型预测越来越准确,网球训练机器人能够提供交互式的智能化训练方式。
技术研发人员:王莉,张勇
受保护的技术使用者:腾特体育科技南通有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!