一种自动化木工机械装置的制作方法
本技术涉及木工机械,特别是一种自动化木工机械装置。
背景技术:
1、木工机械是指在木材加工工艺中,将木材加工的半成品加工成为木制品的机床和机械设备,木工机械的作用主要是木质材料进行加工处理,从而制作出木制家具等;
2、经检索发现,公开号为cn108214748a的中国发明专利,名称为一种木工机械用自动调整角度的装置及其调整方法,本装置通过传感器将信号传递给控制器,控制器控制电机带动木工机械旋转,设置于木工机械上的传感器随其旋转,实现了实时调整木工机械的角度,使木工机械与木板之间的角度始终保持为适合的角度;
3、但在使用过程中,使用范围有限,仅对木工机械的角度进行调整,木板在加工和生产过程中,尤其是对木板的切割和刨平操作时,需将木板移动至切割设备进行定位后切割,切割后再将木板转运或移动至刨切设备定位后进行操作,操作繁琐费事费力,影响木工的工作效率,木工机械的自动化程度低,不利于木工对木板的加工和生产使用。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种自动化木工机械装置,解决了对木板的切割和刨平操作时,需将木板移动至切割设备进行定位后切割,切割后再将木板转运或移动至刨切设备定位后进行操作,操作繁琐费事费力,影响木工的工作效率,木工机械的自动化程度低,不利于木工的加工和生产使用的技术问题。
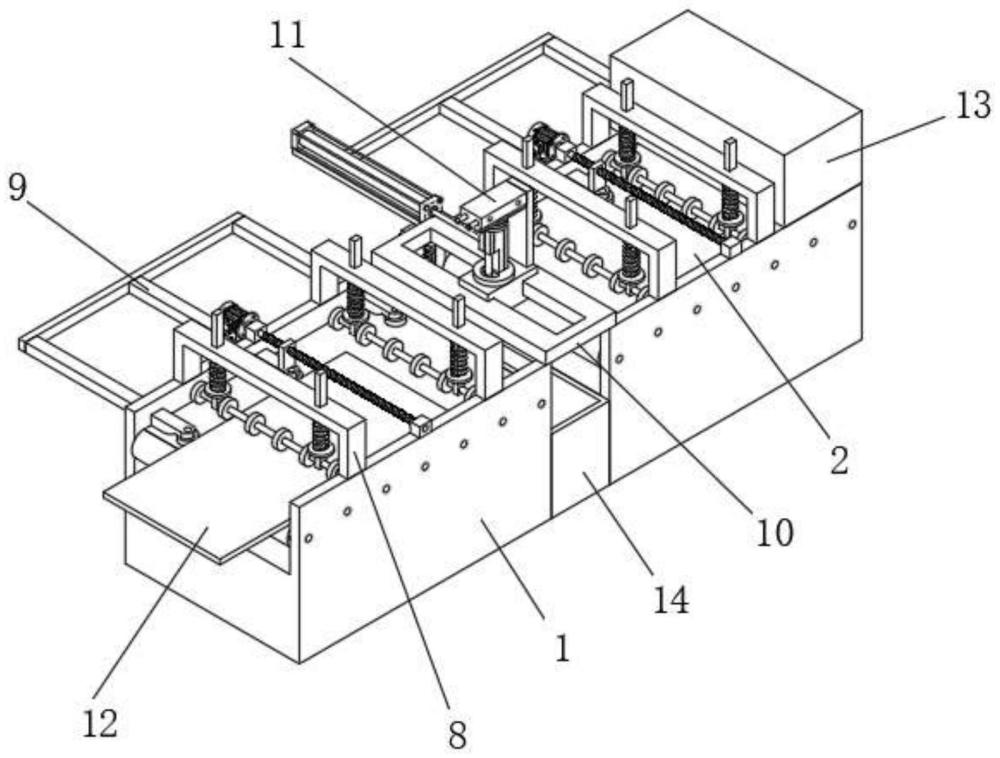
2、为解决上述技术问题,本实用新型提供如下技术方案:一种自动化木工机械装置,包括输送台,所述输送台上端滑动连接有传送带,所述传送带内壁呈左右对称结构摩擦接触有两个输送辊,所述传送带内壁均匀排列结构摩擦接触有多个支撑辊,所述输送辊和支撑辊前后两端均匀输送台转动连接,所述输送台呈左右对称结构设有两个,两个所述输送台上的其中一个输送辊后端贯穿输送台延伸至外部并套接有带轮,两个所述带轮通过皮带相互摩擦传动,其中一个所述输送台前壁通过安装座安装有步进电机,所述步进电机的输出轴与其中一个输送辊同轴连接,所述输送台顶面呈对称结构设有两个按压组件,所述输送台后壁滑动连接有定位机构,两个所述输送台之间固设有支架,所述支架上设有电动往复锯部件,其中一个所述传送带顶面输送有木工板,其中一个所述输送台上安装有刨切机,两个所述输送台之间插接有收纳盒。
3、优选地,所述按压组件包括c型块,所述c型块底面与输送台顶面连接固定,所述c型块上滑动连接有两个推杆,所述推杆上固设有圆块,所述推杆圆周外壁套设有弹簧,所述弹簧顶面与c型块外壁摩擦接触,所述弹簧底面与圆块顶面摩擦接触。
4、优选地,所述c型块内部设有圆杆,所述圆杆上呈均匀排列结构转动连接有多个滚轮,所述滚轮外壁与木工板外壁摩擦接触,所述圆杆套设于两个推杆下端,滚轮外壁与木工板顶面摩擦接触后沿着圆杆旋转,圆杆带动推杆和圆块向上移动,此时弹簧被压缩,使滚轮的输送的木工板进行下压,使其稳定输送。
5、优选地,所述定位机构包括定位轮,所述定位轮设有多个,所述定位轮上端转对连接有滑杆,所述定位轮外壁与木工板侧壁摩擦接触,所述滑杆与输送台滑动连接,所述输送台后侧设有固定块,所述滑杆后壁均与固定块侧壁连接固定。
6、优选地,其中一个所述滑杆顶面固设有连接块,所述连接块上通过螺纹孔螺纹连接有丝杆,所述丝杆前后两端均转动连接有安装架,所述安装架底面与输送台顶面连接固定,所述输送台侧壁上端通过安装座安装有伺服电机,所述伺服电机的输出轴与丝杆同轴连接,定位轮与木工板侧壁摩擦接触进行转动,使木工板另一侧与输送台滑动,对木工板进行定位。
7、优选地,所述电动往复锯部件包括滑块,所述滑块与支架滑动连接,所述支架上通过安装座安装有第一气缸,所述第一气缸的活塞杆与滑块侧壁连接固定,所述滑块中部开设有通槽,所述通槽内部转动连接有圆盘座。
8、优选地,所述圆盘座上通过安装座安装有电动往复锯本体,所述圆盘座顶面开设有半圆槽,所述电动往复锯本体的锯片贯穿半圆槽和通槽延伸至下端。
9、优选地,所述滑块顶面通过安装座安装有旋转气缸,所述旋转气缸的旋转台与电动往复锯本体顶面连接固定,通过电动往复锯本体的锯片对输送的木工板进行横向切割,输送并暂停的木工板进行纵向切割,方便了木工板的加工使用。
10、本实用新型的有益效果:
11、1、通过外部设备将需要进行加工的木工板输送至其中一个输送台的传送带上,通过步进电机带动其中一个输送辊旋转,对木工板从左往右移动,移动至滚轮处时,滚轮外壁与木工板顶面摩擦接触后沿着圆杆旋转,圆杆带动推杆和圆块向上移动,此时弹簧被压缩,使滚轮的输送的木工板进行下压,使其稳定输送,通过伺服电机的输出轴带动丝杆沿着安装架旋转,推动连接块带动其中一个滑杆沿着输送台滑动,通过固定块使滑杆和定位轮同步滑动,推动定位轮与木工板侧壁摩擦接触进行转动,使木工板另一侧与输送台滑动,对木工板进行定位,定位完成后将木工板输送至电动往复锯部件处进行切割,通过收纳盒对木屑进行收集,将切割后的木工板通过刨切机进行刨平和加工至合适厚度,完成木工板的自动加工。实现了木板的切割和刨平自动化操作,提高了木工机械的自动化加工效率,定位效果好降低了加工误差,操作简单省时省力,方便了木工对木板的加工和生产使用。
12、2、将木工板移动至支架下方时,通过第一气缸的活塞杆推动滑块沿着支架滑动至合适的使用位置,通过电动往复锯本体的锯片对输送的木工板进行横向切割,通过旋转气缸的旋转台带动电动往复锯本体和圆盘座沿着滑块旋转至纵向加工角度,通过第一气缸的活塞杆推动滑块沿着支架前后滑动,对输送并暂停的木工板进行纵向切割,不同的切割方向方便将木工板切割至合适的使用长度,提高了加工效率,方便了木工板的加工使用,提供了加工的自动化程度,使用效果更佳。
技术特征:
1.一种自动化木工机械装置,包括输送台(1),其特征在于:所述输送台(1)上端滑动连接有传送带(2),所述传送带(2)内壁呈左右对称结构摩擦接触有两个输送辊(3),所述传送带(2)内壁均匀排列结构摩擦接触有多个支撑辊(4),所述输送辊(3)和支撑辊(4)前后两端均匀输送台(1)转动连接,所述输送台(1)呈左右对称结构设有两个,两个所述输送台(1)上的其中一个输送辊(3)后端贯穿输送台(1)延伸至外部并套接有带轮(5),两个所述带轮(5)通过皮带(6)相互摩擦传动;
2.根据权利要求1所述的自动化木工机械装置,其特征在于:所述按压组件(8)包括c型块(81),所述c型块(81)底面与输送台(1)顶面连接固定,所述c型块(81)上滑动连接有两个推杆(82),所述推杆(82)上固设有圆块(83),所述推杆(82)圆周外壁套设有弹簧(84),所述弹簧(84)顶面与c型块(81)外壁摩擦接触,所述弹簧(84)底面与圆块(83)顶面摩擦接触。
3.根据权利要求2所述的自动化木工机械装置,其特征在于:所述c型块(81)内部设有圆杆(85),所述圆杆(85)上呈均匀排列结构转动连接有多个滚轮(86),所述滚轮(86)外壁与木工板(12)外壁摩擦接触,所述圆杆(85)套设于两个推杆(82)下端。
4.根据权利要求1所述的自动化木工机械装置,其特征在于:所述定位机构(9)包括定位轮(91),所述定位轮(91)设有多个,所述定位轮(91)上端转对连接有滑杆(92),所述定位轮(91)外壁与木工板(12)侧壁摩擦接触,所述滑杆(92)与输送台(1)滑动连接,所述输送台(1)后侧设有固定块(93),所述滑杆(92)后壁均与固定块(93)侧壁连接固定。
5.根据权利要求4所述的自动化木工机械装置,其特征在于:其中一个所述滑杆(92)顶面固设有连接块(94),所述连接块(94)上通过螺纹孔螺纹连接有丝杆(95),所述丝杆(95)前后两端均转动连接有安装架(96),所述安装架(96)底面与输送台(1)顶面连接固定,所述输送台(1)侧壁上端通过安装座安装有伺服电机(97),所述伺服电机(97)的输出轴与丝杆(95)同轴连接。
6.根据权利要求1所述的自动化木工机械装置,其特征在于:所述电动往复锯部件(11)包括滑块(111),所述滑块(111)与支架(10)滑动连接,所述支架(10)上通过安装座安装有第一气缸(112),所述第一气缸(112)的活塞杆与滑块(111)侧壁连接固定,所述滑块(111)中部开设有通槽(113),所述通槽(113)内部转动连接有圆盘座(114)。
7.根据权利要求6所述的自动化木工机械装置,其特征在于:所述圆盘座(114)上通过安装座安装有电动往复锯本体(115),所述圆盘座(114)顶面开设有半圆槽(117),所述电动往复锯本体(115)的锯片贯穿半圆槽(117)和通槽(113)延伸至下端。
8.根据权利要求7所述的自动化木工机械装置,其特征在于:所述滑块(111)顶面通过安装座安装有旋转气缸(116),所述旋转气缸(116)的旋转台与电动往复锯本体(115)顶面连接固定。
技术总结
本技术属于木工机械技术领域,特别是一种自动化木工机械装置,包括输送台,输送台上端滑动连接有传送带,传送带内壁呈左右对称结构摩擦接触有两个输送辊,传送带内壁均匀排列结构摩擦接触有多个支撑辊,输送辊和支撑辊前后两端均匀输送台转动连接,输送台呈左右对称结构设有两个,两个输送台上的其中一个输送辊后端贯穿输送台延伸至外部并套接有带轮,两个带轮通过皮带相互摩擦传动,其中一个输送台前壁通过安装座安装有步进电机,步进电机的输出轴与其中一个输送辊同轴连接。实现了木板的切割和刨平自动化操作,提高了木工机械的自动化加工效率,定位效果好降低了加工误差,操作简单省时省力,方便了木工对木板的加工和生产使用。
技术研发人员:林森
受保护的技术使用者:上海辄禄环境科技有限公司
技术研发日:20230918
技术公布日:2024/5/9
- 还没有人留言评论。精彩留言会获得点赞!