一种超灵敏度电阻响应型可拉伸导电复合纤维及其制备方法与应用与流程
1.本发明涉及导电复合纤维的制备及应变传感器领域,特别是涉及一种电阻响应型导电复合纤维及其制备方法以及作为应变传感器的应用。
背景技术:
2.在过去的十年中,由于柔性电子产品的发展,可穿戴式应变传感器得到了相当大的关注,已成为未来智能设备发展的重要研究方向。通过传感材料的设计、材料与换能器之间构效关系的研究,不同信号收集-转换-输出方式的传感器被开发,如电阻式应变传感器、安培式应变传感器、电容式应变传感器、光学式应变传感器以及场效应式传感器等。这些传感器通过在应变产生时传感材料结构和性能的快速响应可实现实时、在线获取人体运动的精确信息,因此在健康医疗、智能机器人、人机交互、电子皮肤、智能服装等领域具有广阔的应用前景。其中,电阻式应变传感器由于其简单的制造过程和易懂的数据输出方式备受关注,可以敏感地监测人体肌肉运动、关节运动,甚至是呼吸或人体脉搏引起的运动。
3.目前,电阻型应变传感材料主要分为三类,一类是无机导电材料,该类材料具备高灵敏度和低电阻值;第二类是半导体材料,该类传材料具有高灵敏度和高电阻值;第三类是导电高分子材料,该类材料经掺杂后其电导率处于金属与半导体之间。一般来说,电阻型应变传感器的设计思路主要是将导电金属成分(如金纳米颗粒、银纳米纤维或金属氧化物)或碳纳米材料(如炭黑、碳纳米纤维、石墨烯或碳纳米管)与柔性可拉伸介电弹性基体(如聚硅氧烷、橡胶和软聚合物)进行复合后,赋予基体导电性。这类传感器的工作原理简单,主要监测电阻随应变而发生的变化,因此弹性基体应当适应不同程度的运动而快速发生形变,以实现高灵敏度。为此,研究者设计了许多新颖的基体几何结构,如鱼鳞状微结构、逾渗网络、裂纹结构、三明治结构等,尽管这些微结构传感材料表现出了良好的传感性能,但其复杂的制备过程限制了其大规模制备的发展。同时目前传感材料对小应变变化的分辨率仍然存在不足,且应变施加前后存在滞后现象,会导致材料灵敏度较低而出现信号误差。
4.导电纤维一般是指具有导电性能的纤维材料,在国防科技、航空航天、生物医疗、电子科技、智能服装等各个领域具有重要应用。常规导电纤维主要包括金属纤维,碳素纤维,导电性有机纤维和复合纤维。其中,金属纤维具有较低的比电阻,是导电性能最好的一类纤维材料,主要是通过对金属或其氧化物进行熔融拉伸制成,具有防辐射、强度高、导热性能好、模量高等优点,但耐化学腐蚀性较差,抱合困难。碳素导电纤维同样具有较低的电阻率,导电性能优良,且长径比大、密度小,具有较高的强度和良好的化学稳定性,主要有碳纤维、碳纳米管纤维、石墨烯纤维等,但这类纤维由于模量较高而缺乏韧性,不耐折弯。导电高分子型纤维是一种新型导电有机纤维,主要包括聚乙炔、聚苯胺、聚吡咯、聚噻吩等导电高分子,这些高分子经过掺杂后具有一定导电性。相比于金属和碳素导电纤维,导电高分子的电阻率较高,导热性能较差,但其设计性强,具有良好的柔性、模量、强度和可加工性。然而由于复杂的工艺和昂贵的制造成本,导电高分子直接纺丝成纤难以实现,这主要是由于
该类高分子独特的共轭结构使其加工困难,同时单体或掺杂剂多具有毒性,合成条件较为苛刻。
5.为改善上述无机导电材料的可加工性和使用性能,研究者将无机导电材料与有机高分子材料进行复合制备导电复合纤维,从而结合无机导电材料优异的导电性和有机高分子材料良好的可设计性和加工性能,越来越成为复合材料领域一个重要的研究方向。导电复合纤维的制备方法主要包括以下几种:
6.混合法,主要是将导电介质与聚酯进行混合后纺丝所得,是目前较为普遍的制备方法,但良好的导电性来自于导电介质在聚酯基体内部形成连续相结构从而构建起导电通路,因此需要导电介质在聚酯中具有良好的相容性、分散性以及连续性;
7.后处理法,主要是将无机导电材料通过蒸镀、电镀等方式涂覆于普通纤维表面形成导电涂层,但涂层在使用过程中容易脱落,导致涂层分布不均,导电性下降;
8.表面炭化法,主要是对纤维进行高温处理使其表面形成炭化层,从而获得导电能力,但这种方法适用于部分种类化学纤维;
9.复合纺丝法,主要是通过混纺工艺使无机导电纤维与化学纤维形成丝束,但仍然无法很好地改善无机导电纤维的诸多缺点。
10.因此,如何通过简单的制造方法和结构设计将无机导电材料与有机聚酯纤维结合构建导电复合纤维依旧制约着导电复合纤维的工业化制备和应用。
技术实现要素:
11.本发明提供了一种超灵敏度电阻响应型可拉伸导电复合纤维及其制备方法与应用,采用并列螺旋结构弹性纤维作为可拉伸基底,碳纳米管纳米复合物作为导电材料,制备了具有良好拉伸性和电阻响应性的导电复合纤维。
12.该导电复合纤维可作为纤维状电阻型应变传感器,由此本发明还提出了一种基于多级次微纳间隙的电阻响应机制,可以准确灵敏地捕捉人体生理信号和关节运动引起的不同程度应变。这种简易的制造策略有望用于超灵敏度导电复合纤维及其可穿戴应变传感材料的大规模制备。
13.本发明的技术方案如下:
14.一种超灵敏度电阻响应型可拉伸导电复合纤维的制备方法,所述方法包括如下步骤:
15.(1)溶液自由基聚合制备可交联共轭聚合物
16.将亲水单体、共轭单体、疏水单体依次加入到反应溶剂中混匀,接着加入引发剂,搅拌混匀,在50~60℃下反应12~24h,得到聚合物溶液;所得聚合物溶液经沉淀提纯,真空干燥(30~40℃),得到可交联共轭聚合物(粉末状);
17.所述亲水单体为烯酸类(例如:丙烯酸、甲基丙烯酸、戊烯酸、己烯酸等)、烯酸盐类(例如:丙烯酸钠、丙烯酸锌等)、丙烯酰胺、丙烯酸羟乙酯中的任一种;
18.所述共轭单体为n-乙烯基咔唑、7-(4-乙烯基卞氧基)-4-甲基香豆素、乙烯基噻吩中的任一种;
19.所述疏水单体为丙烯酸酯类,例如:丙烯酸异辛酯、甲基丙烯酸酯、丙烯酸异冰片酯、丙烯酸丁酯等中的任一种;
20.所述亲水单体、共轭单体、疏水单体的物质的量之比为1:1:1;
21.所述反应溶剂为二氧六环、丙酮、乙醚、三氯甲烷、四氢呋喃、乙醇中的一种或几种;反应溶剂的用量没有特别要求,以刚好溶解反应物且形成流动性好的液体为准;
22.所述引发剂为偶氮二异丁腈,引发剂的用量为亲水单体、共轭单体、疏水单体总质量的1.5%;
23.所述沉淀提纯的方法为:将所得聚合物溶液在搅拌条件下逐滴滴加到沉淀剂石油醚中(沉淀剂用量为原溶液体积的5~7倍),收集生成的沉淀,用四氢呋喃溶解后,继续滴加到沉淀剂石油醚中,进行沉淀提纯2~3次,最后所得产物经真空干燥,得到可交联共轭聚合物;
24.(2)制备碳纳米管复合物分散液
25.将碳纳米管、聚多巴胺、步骤(2)所得可交联共轭聚合物和十二烷基硫酸钠加入到n,n-二甲基甲酰胺中,超声分散均匀,再于超声条件下滴加去离子水,得到碳纳米管复合物分散液;
26.所述碳纳米管、聚多巴胺、可交联共轭聚合物、十二烷基硫酸钠、n,n-二甲基甲酰胺的质量份配比分别为:50~100份、1~5份、10~50份、1~3份、350~1000份;
27.所得碳纳米管复合物分散液中,碳纳米管最终浓度为1~5%;
28.(3)制备导电修饰层
29.将步骤(2)所得碳纳米管复合物分散液浸涂到基底螺旋结构弹性纤维表面,然后进行电聚合或光交联,得到具有导电修饰层的螺旋结构弹性纤维;
30.所述螺旋结构弹性纤维由一个弹性橡胶线芯和缠绕在线芯上形成弹簧状结构的纱线组成,纤维总直径0.8~1mm;纱线为双束或者三束,呈交替并列螺旋,每束由多根单纱合股而成,单纱直径15~40μm;所述单纱材质为聚丙烯、聚对苯二甲酸乙二醇酯、聚对苯二甲酸丙二醇酯、聚对苯二甲酸丁二酯、氨纶、ssy弹性纤维、sph纤维、t400弹性纤维中的一种或几种;螺旋结构弹性纤维可商购获得;
31.具体的,所述浸涂的方法为:将螺旋结构弹性纤维浸没于碳纳米管复合物分散液中,向螺旋结构弹性纤维轴向施加拉力使其产生10~20%形变,浸涂3~5s,之后撤去拉力恢复形变,取出于50℃下干燥(30min以上)后,完成一次浸涂、干燥过程,重复该过程3~6次,最后一次浸涂后,于60~70℃下干燥;
32.所述电聚合是指共轭单体咔唑或噻吩的电化学氧化聚合,电聚合通过三电极系统进行,电解液为0.1mol/l高氯酸锂溶液,采用循环伏安法,电压范围0~2v,扫描速率100mv/s,扫描圈数30;
33.所述光交联是指共轭单体香豆素在紫外光辐照下进行光二聚作用,紫外光源为λ>310nm、200w的水银短弧灯,光照时间为10~30min;
34.电聚合或光交联可加强导电修饰层与可拉伸基底之间的相互作用,进一步完善导电通路形成;
35.(4)制备封装层
36.将聚二甲基硅氧烷预聚物和固化剂混合,所得混合物经真空脱气后均匀地涂刷到步骤(3)所得具有导电修饰层的螺旋结构弹性纤维表面,经热固化形成封装层,完成可拉伸导电复合纤维的制备;
37.所述聚二甲基硅氧烷预聚物和固化剂的质量比为10:1;
38.所述混合物的涂刷厚度为1~100μm;
39.所述热固化的处理温度为120℃,时间为2h;
40.所形成的封装层为有韧性的弹性体封装层,起保护作用,最终所得可拉伸导电复合纤维的初始室温电阻率ρ<0.05ω
·
m,最大拉伸形变200%。
41.本发明制备的超灵敏度电阻响应型可拉伸导电复合纤维可作为可穿戴应变传感器,安装在人体不同关节皮肤处,如指关节、腕关节、膝关节或喉部,并通过导线与数字万用表连接,以评估其在人体不同部位的响应特性,当运动发生时,实时记录复合纤维电阻变化。
42.该应变传感器对应变的响应时间为0.1~0.3s,回复时间为0.1~0.4s,纤维应变范围为0~200%。
43.该应变传感器对关节运动的电阻变化率,指关节第一指节电阻变化率0~300%,指关节第二指节弯曲45
°
电阻变化率0~70%,指关节第二指节弯曲90
°
电阻变化率0~300%,腕关节运动电阻变化率0~200%,膝关节走路运动电阻变化率0~300%,膝关节跑步运动电阻变化率0~900%,喉部生理活动电阻变化率0~30%。
44.该应变传感器对扭曲和弯折行为具有响应性,对不同扭曲角度电阻变化率为0~90%,对不同弯折角度电阻变化率为0~60%。
45.本发明的优势在于:
46.(1)本发明提供了一种超灵敏度电阻敏感型可拉伸应变传感纤维材料的设计思路及应用,过程简单,成本低廉,可实现连续化生产;不同于传统单束螺旋结构弹性纤维,本发明采用多束并列螺旋结构弹性纤维,其结构致密性不仅提高了复合纤维的电阻灵敏度,而且在形变过程中可保持导电通路完整性,实现对不同程度应变响应。
47.(2)本发明首次将具有光电活性的碳纳米管复合物用于修饰螺旋结构弹性纤维制备导电复合纤维,采用共轭聚合物作为大分子表面活性剂对碳纳米管进行修饰和分散,不仅具有良好的分散效果,而且很好地保留了碳纳米管的固有性质,同时该聚合物具有光电活性,可进一步增强碳纳米管之间导电通路的形成以及增强导电复合物与弹性纤维之间的相互作用,提高性能稳定性。
48.(3)所制备的导电纤维具有良好的导电性和灵敏的电阻响应性,可以准确捕捉不同人体关节产生的不同程度运动,而且可以监测包括头部运动、呼吸、说话、吞咽在内的喉部生理信号,灵敏度高,响应时间短,回复性强且无滞后现象,其灵敏度及应用性能处于同类型产品前列。
附图说明
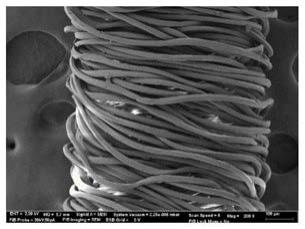
49.图1为实施例1中商业化螺旋结构弹性纤维的扫描电镜图。
50.图2为实施例1中导电层制备之后复合纤维的显微镜照片。
51.图3为实施例1中可拉伸导电复合纤维的显微镜照片。
52.图4为实施例1中可拉伸导电复合纤维在100%应变下的显微镜照片。
53.图5为实施例1中可拉伸导电复合纤维在人体手关节运动时的电阻变化。
54.图6为实施例2中可拉伸导电复合纤维对人体呼吸活动的监测。
具体实施方式
55.下面通过具体实施例进一步描述本发明,但本发明的保护范围并不仅限于此。
56.以下所述方法如无特别说明均视为常规方法。
57.实施例中使用的商业化螺旋结构弹性纤维购自加拿大greenbrier international公司,直径1mm。
58.实施例中使用的聚二甲基硅氧烷预聚物和其固化剂购自道康宁sylgard dc184型双组份聚二甲基硅氧烷。
59.实施例1
60.可交联共轭聚合物的溶液自由基聚合。
61.将3.6g丙烯酸、9.6g n-乙烯基咔唑和9.2g丙烯酸异辛酯加入到100ml二氧六环中,在搅拌条件下使其充分溶解。向上述混合溶液中加入0.336g的偶氮二异丁腈作为引发剂,充分溶解后在60℃下反应24h,得到可交联共轭聚合物溶液。反应过程中注意观察溶液性状的变化,注意温度控制。将上述聚合物溶液在搅拌条件下逐滴滴加到500ml石油醚中,收集生成的沉淀,用20ml四氢呋喃溶解,继续滴加到沉淀剂石油醚中,进行沉淀提纯3次,最后所得产物在35℃真空干燥,得到可交联共轭聚合物粉末。
62.碳纳米管复合物分散液的制备。
63.将2g碳纳米管、1g可交联共轭聚合物、0.02g聚多巴胺(粒径分布在100~150nm)和0.02g十二烷基硫酸钠溶解在10ml的n,n-二甲基甲酰胺中,超声至均匀分散,再在超声条件下向其中逐滴加入30ml去离子水,最终碳纳米管浓度约为4.6%。
64.导电修饰层制备。
65.选择一种商业化螺旋结构弹性纤维,该弹性纤维由一个弹性橡胶线芯和双束并列缠绕在线芯上形成弹簧状结构的聚丙烯纱线组成,纤维总直径约1mm,每束纱线由多根单纱合股而成,单纱直径约15μm,扫描电镜如图1。剪取上述弹性纤维5cm,将所得碳纳米管复合物分散液浸涂到弹性纤维表面,浸涂时间5s,浸涂时向弹性纤维轴向施加拉力使其产生10%的形变,浸涂完成后撤去应力恢复形变,在50℃下干燥30min,之后再继续重复浸涂和干燥过程重复3次,最后一次干燥温度控制在60℃。然后对修饰层进行咔唑基团电聚合,通过上海辰华chi600e电化学工作站的三电极系统进行,电解液为0.1mol/l的高氯酸锂溶液,采用方法是循环伏安法,电压范围0~2v,扫描速率100mv/s,扫描圈数30。所得复合纤维的显微镜照片如图2。
66.封装层的制备。
67.将5g聚二甲基硅氧烷预聚物和其固化剂按照10:1比例混合后进行真空脱气,将混合物均匀地涂刷到所得复合纤维表面,涂刷厚度为80μm左右,在120℃下热固化2h,在其表面形成有韧性的弹性体封装层,起保护作用,得到可拉伸导电复合纤维,如图3。
68.将上述导电复合纤维沿轴向方向进行拉伸至产生100%应变,其显微镜照片如图4,可以看出,拉伸之后螺旋纱线被拉开,但并未暴露出橡胶纤芯,说明双束并列螺旋纱线具有结构紧密性。
69.将上述导电复合纤维贴合于手关节处,通过铜导线连接纤维与数字万用表,实时测试手指在弯曲动作过程中纤维的电阻变化,如图5所示。该纤维可在0.1s内对指关节运动产生响应和回复,具有快速响应和回复的能力,说明复合纤维对指关节运动具有高灵敏度
响应。当关节弯曲90
°
时,电阻变化率为260%以上。
70.将上述导电复合纤维贴合于人体喉部,通过铜导线连接纤维与数字万用表,实时测试呼吸过程中纤维的电阻变化,测试结果如图6。可以看出本发明中的传感纤维对呼吸等人体生理活动具有灵敏快速响应性。
71.实施例2
72.可交联共轭聚合物的溶液自由基聚合。
73.将3.6g丙烯酸、7.3g 7-(4-乙烯基卞氧基)-4-甲基香豆素和4.6g丙烯酸异辛酯加入到100ml二氧六环中,在搅拌条件下使其充分溶解。向上述混合溶液中加入0.23g的偶氮二异丁腈作为引发剂,充分溶解后在60℃下反应24h,得到可交联共轭聚合物溶液。反应过程中注意观察溶液性状的变化,注意温度控制。将上述聚合物溶液在搅拌条件下逐滴滴加到500ml石油醚中,收集生成的沉淀,用20ml四氢呋喃溶解,继续滴加到沉淀剂石油醚中,进行沉淀提纯3次,最后所得产物在35℃真空干燥,得到可交联共轭聚合物粉末。
74.碳纳米管复合物分散液的制备。
75.将2g碳纳米管、1g可交联共轭聚合物、0.02g聚多巴胺(粒径分布在100~150nm)和0.02g十二烷基硫酸钠溶解在15ml的n,n-二甲基甲酰胺中,超声至均匀分散,再在超声条件下向其中逐滴加入45ml去离子水,最终碳纳米管浓度约为3.2%。
76.导电修饰层制备。
77.选择同实施例1中相同的一种商业化螺旋结构弹性纤维,剪取5cm,将所得碳纳米管复合物分散液浸涂到弹性纤维表面,浸涂时间5s,浸涂时向弹性纤维轴向施加拉力使其产生10%的形变,浸涂完成后撤去应力恢复形变,在50℃下干燥30min,之后再继续重复浸涂和干燥过程重复3次,最后一次干燥温度控制在60℃。然后对修饰层进行光交联,通过紫外光辐照使共轭聚合物中的香豆素基团进行光二聚作用,增强导电层与弹性纤维之间相互作用。将上述纤维置于紫外光源下,紫外光源为λ>310nm、200w的水银短弧灯,进行辐照15min。而后对纤维进行翻面,相同条件继续辐照15min。
78.封装层的制备。
79.将5g聚二甲基硅氧烷预聚物和其固化剂按照10:1比例混合后进行真空脱气,将混合物均匀地涂刷到所得复合纤维表面,涂刷厚度为80μm左右,在120℃下热固化2h,在其表面形成有韧性的弹性体封装层,起保护作用,得到可拉伸导电复合纤维。所得纤维的室温电阻率ρ约为0.05ω
·
m,最大拉伸形变200%。
80.对比例
81.以专利cn201510518867作为对比例,与本发明制备的电阻响应型可拉伸导电复合纤维进行对比。制备方法对比结果显示:对比例为单螺旋结构,本发明为并列多螺旋结构;对比例导电组分为石墨烯、银浆导电层、pedot:pss、聚苯胺、聚吡咯中的一种,本发明为可交联共轭聚合-碳纳米管复合物。
82.通过上述不同结构和材料制备的应变传感器性能进行对比,结果显示:对比例的应变感应范围是0~100%,本发明0~200%;对比例对指关节运动的电阻变化率约为0~80%,本发明0~300%。由此上述对比结果可见本发明所提出的电阻响应型可拉伸导电复合纤维结构、制备材料和方法具有显著的性能提升。
83.以上内容仅仅针对本发明所描述构思所作的举例和说明,相关技术人员对所描述
的内容做出修改或补充或采用类似方式,只要不偏离发明的构思均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1