用于编织机异形工件加工的机械手协同装置
本发明涉及编织机,更具体地说,本发明涉及用于编织机异形工件加工的机械手协同装置。
背景技术:
1、传统的编织技术一般用来生产绳索、电缆、网带等产品。近年来,编织技术已广泛应用于航空航天、轨道交通等领域,在大飞机隔框、地板梁以及高铁转向架侧梁等大尺寸异形结构件上得到了成功应用。
2、编织机对异型工件进行编织时通常采用立体编织的方法,通过线轴在编织机拨盘上交错运动,使纤维相互交织,并沉积在异型工件芯轴表面形成异型编织物。在对异形大尺寸工件进行编织加工时,需要对异型工件芯轴装夹固定,编织过程中需保证异型工件芯轴穿过编织机中心并按照规划的运动轨迹进行牵引。
3、现有技术中,如申请号为201811622297.x的中国专利,公开了一种由机械臂控制芯轴的三维圆形编织机,包括机架,机架上沿竖直方向安装有圆环板,圆环板上同轴安装有环形的轨道基板,轨道基板的圆周上均匀分布有若干四缺口角导轮,四缺口角导轮上设有携纱器,四缺口角导轮通过导向传动轴连接在机架上,导向传动轴上连接有传动机构,机架的中心处设有芯轴,芯轴的一端设有纱嘴,芯轴的另一端设有机械臂。此装置利用六自由度机械臂的末端和芯轴相连接来直接控制芯轴的运动,实现大直径复杂形状与成型件的三维编织。
4、但在实际编织过程中,异形大尺寸工件形状不规则,芯轴较重,机械臂单端夹持会造成芯模弯曲变形,导致编织芯轴偏离编织环中心,致使各方向纱线张力不一致,影响成品质量。因此,需要对机械手夹持和牵引方式进行改进,提出一种用于编织机异形工件加工的机械手协同装置,以解决现有机械手使用中存在的问题。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、为至少部分地解决上述问题,本发明提供了用于编织机异形工件加工的机械手协同装置,包括:
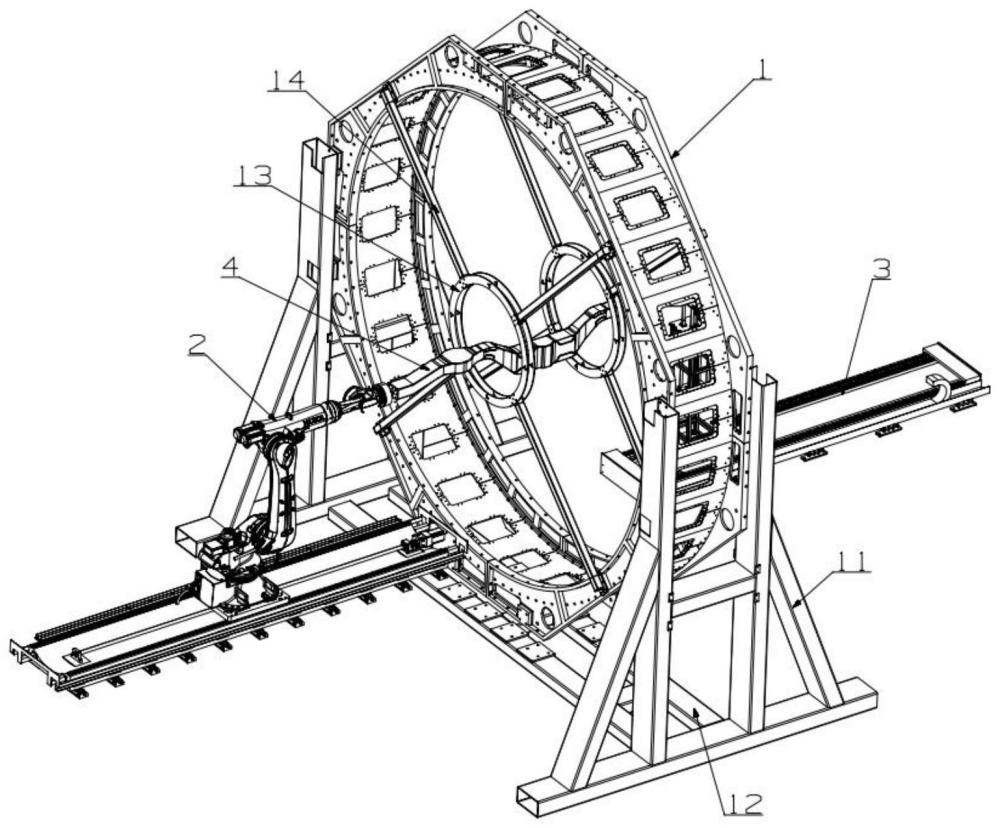
3、环形编织机,环形编织机用于对异型工件进行编织,异型工件芯轴穿设环形编织机布置;
4、机械手单元和随动支撑单元,机械手单元和随动支撑单元分别布置于环形编织机两侧,机械手单元和随动支撑单元对异型工件芯轴两端进行夹持。
5、优选的,环形编织机上连接有支架,支架底端连接有底座,环形编织机内部沿圆周方向均匀连接有若干个拨盘,拨盘上连接有经纱线轴和纬纱线轴,拨盘驱动经纱线轴和纬纱线轴呈8字型运动。
6、优选的,环形编织机两侧设置有编织环,编织环通过编织环支架连接于环形编织机端面,编织环与环形编织机同轴布置,纱线穿过编织环缠绕于异型工件芯轴上。
7、优选的,机械手单元包括:
8、平台底座,平台底座安装于环形编织机一侧,平台底座顶端连接有两条平行设置的导轨,两条导轨之间设置有丝杠,丝杠一端连接有伺服电机,伺服电机与控制器电连接;
9、牵引平台,牵引平台滑动连接于导轨上,牵引平台通过底端螺纹孔与丝杠连接,牵引平台上安装有多自由度机械手;
10、卡盘,卡盘连接于多自由度机械手输出端,卡盘上连接有第一夹具,第一夹具与异型工件芯轴一端连接。
11、优选的,随动支撑单元包括:
12、电动滑台,电动滑台安装于环形编织机另一侧,电动滑台的顶端滑动连接有滑台板;
13、支撑架,支撑架安装于滑台板顶端,支撑架上连接有升降机构,升降机构与控制器电连接;
14、第二夹具,第二夹具转动连接于升降机构顶端,并且第二夹具与异型工件芯轴另一端连接。
15、优选的,导轨和电动滑台均关于环形编织机中心对称,导轨和电动滑台延伸方向与环形编织机端面垂直设置。
16、优选的,异型工件芯轴中空设置,第一夹具和第二夹具延伸至异型工件芯轴内部。
17、优选的,第一夹具上固定连接有连接头,连接头中空设置,连接头延伸至异型工件芯轴内部。
18、优选的,连接头内设置有辅助装夹单元,辅助装夹单元包括:定位单元和支撑单元,定位单元包括:
19、电机,电机通过支架连接于连接头内圈,电机上连接有第一转轴,第一转轴上连接有第一齿轮,第一转轴上转动连接有固定板一,固定板一上水平连接有滑杆,滑杆外侧滑动连接有齿板,齿板上并列设置有两排卡齿,齿板延伸出连接头,电机与控制器电连接;
20、滑环,滑环固定连接于连接头内圈远离第一夹具的一侧,滑环内设置有环形滑槽,环形滑槽内滑动连接有滑块;
21、连接架,连接架固定连接于固定板一上,连接架上通过第三转轴连接有第二齿轮和蜗轮,连接架底端连接有固定板二,固定板二与滑块固定连接,连接架上连接有距离传感器,距离传感器与控制器电连接;
22、第二转轴,第二转轴固定连接于固定板一上,第二转轴穿设固定板二设置,第二转轴上连接有第三齿轮和蜗杆,第三齿轮与第一齿轮啮合连接,蜗杆与蜗轮啮合连接,第二齿轮布置于蜗杆两侧。
23、优选的,定位单元还包括:
24、滑套,滑套滑动连接于第三转轴上,第二齿轮连接于滑套外圈,滑套远离蜗轮的一侧连接有磁块;
25、电磁块,电磁块连接于连接架内侧,电磁块与控制器电连接,电磁块和磁块之间连接有弹簧。
26、优选的,支撑单元包括:
27、限位盘,限位盘固定连接于齿板的延伸端,限位盘内沿圆周方向均匀布置有多个顶出腔,顶出腔两侧分别连通有第一腔体和第二腔体;
28、支撑杆,支撑杆倾斜放置于第一腔体内,第一腔体内壁连接有将支撑杆推入顶出腔的电动翻转板,电动推杆与控制器电连接,第一腔体侧端通过弹簧连接有楔形卡块,楔形卡块与支撑杆内侧卡接,支撑杆外侧连接有滚轮;
29、推块,推块滑动连接于顶出腔内,推块与顶出腔内壁之间连接有弹簧,推块内腔滑动连接有限位块,限位块与推块内腔之间连接有弹簧,限位块穿设推块向第二腔体方向延伸,顶出腔和第二腔体之间连通有限位孔,限位块卡接于限位孔内;
30、转杆,转杆中部铰接于第二腔体内壁,转杆两端分别铰接有顶杆一和顶杆二,顶杆一延伸至顶出腔内,顶杆二延伸至限位孔内与限位块接触,转杆与第二腔体之间连接有弹簧。
31、相比现有技术,本发明至少包括以下有益效果:
32、本发明提供的用于编织机异形工件加工的机械手协同装置,通过机械手单元和随动支撑单元对大尺寸异型工件进行装夹,实现了编织过程中对大尺寸异型工件的支撑和进给,根据自身形状调整异型工件芯轴竖直方向的位置,保证异型工件芯轴的编织位置始终位于环形编织机的中心,提高了编织过程中异型工件芯轴各方向纱线张力的一致性,改善编织质量。
33、本发明所述的用于编织机异形工件加工的机械手协同装置,本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
技术特征:
1.用于编织机异形工件加工的机械手协同装置,其特征在于,包括:
2.根据权利要求1所述的用于编织机异形工件加工的机械手协同装置,其特征在于,环形编织机(1)上连接有支架(11),支架(11)底端连接有底座(12),环形编织机(1)内部沿圆周方向均匀连接有若干个拨盘,拨盘上连接有经纱线轴和纬纱线轴,拨盘驱动经纱线轴和纬纱线轴呈8字型运动。
3.根据权利要求2所述的用于编织机异形工件加工的机械手协同装置,其特征在于,环形编织机(1)两侧设置有编织环(13),编织环(13)通过编织环支架(14)连接于环形编织机(1)端面,编织环(13)与环形编织机(1)同轴布置,纱线穿过编织环(13)缠绕于异型工件芯轴(4)上。
4.根据权利要求1所述的用于编织机异形工件加工的机械手协同装置,其特征在于,机械手单元(2)包括:
5.根据权利要求4所述的用于编织机异形工件加工的机械手协同装置,其特征在于,随动支撑单元(3)包括:
6.根据权利要求5所述的用于编织机异形工件加工的机械手协同装置,其特征在于,导轨(22)和电动滑台(31)均关于环形编织机(1)中心对称,导轨(22)和电动滑台(31)延伸方向与环形编织机(1)端面垂直设置。
7.根据权利要求5所述的用于编织机异形工件加工的机械手协同装置,其特征在于,异型工件芯轴(4)中空设置,第一夹具(28)和第二夹具(34)延伸至异型工件芯轴(4)内部。
8.根据权利要求7所述的用于编织机异形工件加工的机械手协同装置,其特征在于,第一夹具(28)上固定连接有连接头(29),连接头(29)中空设置,连接头(29)延伸至异型工件芯轴(4)内部。
9.根据权利要求8所述的用于编织机异形工件加工的机械手协同装置,其特征在于,连接头(29)内设有辅助装夹单元,辅助装夹单元包括:定位单元和支撑单元,定位单元包括:
10.根据权利要求9所述的用于编织机异形工件加工的机械手协同装置,其特征在于,定位单元还包括:
技术总结
本发明公开了用于编织大尺寸异形工件加工的机械手协同装置,包括:环形编织机,环形编织机用于对异型工件进行编织,异型工件芯轴穿过环形编织机布置;机械手单元和随动支撑单元,机械手单元和随动支撑单元分别布置于环形编织机两侧,机械手单元和随动支撑单元对异型工件芯轴两端进行夹持。本发明通过机械手单元和随动支撑单元对大尺寸异型工件进行装夹,实现了编织过程中对大尺寸异型工件的支撑和进给,根据自身形状调整异型工件芯轴竖直方向的位置,保证异型工件芯轴的编织位置始终位于环形编织机的中心,提高了编织过程中异型工件芯轴各方向纱线张力的一致性,改善编织质量。
技术研发人员:郗欣甫,谭俊峰,孙以泽,孟婥,孙志军
受保护的技术使用者:东华大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!