电镐装置及具有其的机器人的制作方法
1.本发明涉及机械设计领域,具体而言,涉及一种电镐装置。
背景技术:
2.电镐是通过电机驱动,在气缸的作用下完成循环作业,能够完成打凿、铲平和开槽等作业,现有的电镐大多通过手持操作,对墙面等区域进行打凿,在对较高区域打凿时,需要搭建脚手架等。
3.此外,现有的通过电机传动的电镐,当密封圈发生磨损,气缸油脂减少时,会导致无冲击或冲击无力。
4.目前,市场上出现了利用电磁铁取代电机转动的电镐装置,但是机械组装的搞头,容易脱落,使电镐的搞头输出不稳定,从而容易造成安全隐患。
技术实现要素:
5.本发明的主要目的在于提供一种电镐装置及具有其的机器人,以解决现有技术中的电镐装置的搞头安装不稳定的问题。
6.为了实现上述目的,本发明提供了一种电镐装置,包括:机体,机体内设置有安装空间;镐头组件,镐头组件安装在机体上,镐头组件相对于机体可移动地设置,以对待加工部件施加冲击力;固定组件,固定组件安装在安装空间内,固定组件上设置有第一定位部件,镐头组件上设置有与第一定位部件相互卡接的第二定位部,以使镐头组件与固定组件连接。
7.进一步地,第一定位部件为电磁块,第二定位部为与电磁块的至少部分相互卡接的卡槽,卡槽内具有与电磁块相对设置的电磁铁,以在电磁铁通电后,使电磁铁与电磁块相互排斥,以使镐头组件与固定组件分离。
8.进一步地,第一定位部件上具有导向端面,固定组件还包括:安装块,安装块上设置有用于容纳镐头组件的容纳槽,镐头组件的至少部分沿导向端面的延伸方向插入容纳槽内;安装块沿安装空间的延伸方向可移动地设置,以通过安装块带动镐头组件移动;第一弹性件,第一弹性件安装在容纳槽的侧壁上,第一定位部件与第一弹性件连接,以通过第一弹性件的弹性力带动第一定位部件移动。
9.进一步地,容纳槽的侧壁上设置有用于安装第一弹性件的安装槽,第二定位部具有与安装槽相对设置的卡槽,第一定位部件的至少部分卡接在卡槽内。
10.进一步地,卡槽内设置有电磁铁,第一定位部件为与电磁铁相配合的电磁块,电磁铁与电磁块相对设置。
11.进一步地,固定组件还包括:第二弹性件,第二弹性件的第一端与安装空间的顶壁连接,第二弹性件的第二端与安装块连接,以通过第二弹性件的弹性力推动安装块移动。
12.进一步地,电镐装置还包括:动力组件,动力组件安装在安装空间内,动力组件与镐头组件相对设置;动力组件具有冲击块,冲击块沿安装空间的延伸方向可移动地设置,以
通过冲击块推动镐头组件移动。
13.进一步地,冲击块具有电磁性,动力组件还包括:第一电磁铁,第一电磁铁设置在安装空间的内壁上;第二电磁铁,第二电磁铁设置在安装空间的内壁上,第二电磁铁位于第一电磁铁的下方,以通过第一电磁铁和第二电磁铁的磁性力带动冲击块往复运动;电磁铁箱,电磁铁箱安装在安装空间的底部并位于第二电磁铁的下方;第一压力传感器,第一压力传感器设置在电磁铁箱与冲击块接触的接触面上,以用于感应冲击块的压力。
14.进一步地,镐头组件包括:镐头,用于与待加工部件接触;连接件,连接件上设置有螺纹孔,镐头上设置有外螺纹,以使镐头与连接件螺纹连接;其中,第二定位部设置在连接件上。
15.本发明还提供了一种机器人,包括电镐装置,其中,电镐装置为上述的电镐装置。
16.进一步地,机器人包括:第一扭转机构,第一扭转机构的至少部分绕第一预定轴线可转动地设置,电镐装置与第一扭转机构连接,以使第一扭转机构带动电镐装置绕第一预定轴线转动;第二扭转机构,第一扭转机构与第二扭转机构连接,第二扭转机构绕第二预定轴线可转动地设置,以带动第一扭转机构转动;其中,第一预定轴线与第二预定轴线相互垂直。
17.进一步地,机器人还包括:支撑架,支撑架绕第三预定轴线可转动地设置,电镐装置与支撑架连接,以使支撑架带动电镐装置移动;其中,支撑架上设置有驱动丝杠,驱动丝杠的延伸方向与支撑架的延伸方向一致,电镐装置与驱动丝杠连接,以使电镐装置相对于支撑架移动;顶推机构,顶推机构具有可伸缩设置的伸缩杆,伸缩杆与支撑架铰接,以通过伸缩杆带动支撑架转动。
18.应用本发明的技术方案,根据本发明提供的电镐装置,包括机体、镐头组件和固定组件,其中,机体内设置有安装空间,镐头组件安装在机体上,镐头组件相对于机体可移动地设置,以对待加工部件施加冲击力;固定组件,固定组件安装在安装空间内,固定组件上设置有第一定位部件,镐头组件上设置有与第一定位部件相互卡接的第二定位部,以使镐头组件与固定组件连接。通过第一定位部件与第二定位部卡接,实现第一定位部件嵌入镐头组件中,使镐头组件与固定组件稳定连接,以避免镐头组件在运转过程中脱离机体,实现镐头组件的运转稳定性。
附图说明
19.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
20.图1示出了根据本发明的电镐装置的实施例的结构示意图;
21.图2示出了根据本发明的电镐装置的剖视图;
22.图3示出了根据图2的电镐装置的a部分的放大图;
23.图4示出了根据本发明的电镐装置的第一状态图;
24.图5示出了根据本发明的电镐装置的第二状态图;以及
25.图6示出了根据本发明的电镐装置的第三状态图;
26.图7示出了根据本发明的机器人的实施例的结构示意图;
27.图8示出了根据图7的机器人的侧视图;
28.图9示出了根据本发明的机器人的固定机构的实施例的结构示意图;
29.图10示出了根据图9的固定机构的侧视图。
30.其中,上述附图包括以下附图标记:
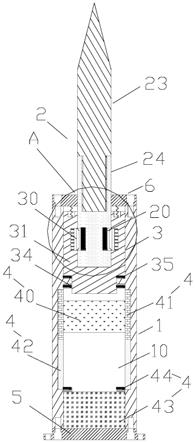
31.1、机体;10、安装空间;2、镐头组件;20、第二定位部;21、卡槽;23、镐头;24、连接件;
32.3、固定组件;30、第一定位部件;31、安装块;310、容纳槽;32、第一弹性件;311、安装槽;33、第二弹性件;34、第二压力传感器;35、垫片;4、动力组件;40、冲击块;41、第一电磁铁;42、第二电磁铁;43、电磁铁箱;44、第一压力传感器;5、下盖;6、上盖;
33.100、电镐装置;200、固定机构;300、第一扭转机构;301、第一驱动电机;302、支撑板;303、底板;304、第一角度传感器;400、第二扭转机构;401、第二驱动电机;402、连接板;201、固定块;202、紧固部;203、抱紧件;204、旋转孔;500、支撑架;501、驱动丝杠;502、第三驱动电机;503、第二角度传感器;504、铰接板;600、顶推机构;601、伸缩杆;602、铰接块;700、激光测距仪;800、行走底盘;900、视觉拍照机构。
具体实施方式
34.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
35.本发明提供了一种电镐装置,请参考图1至图6,包括:机体1,机体1内设置有安装空间10;镐头组件2,镐头组件2安装在机体1上,镐头组件2相对于机体1可移动地设置,以对待加工部件施加冲击力;固定组件3,固定组件3安装在安装空间10内,固定组件3上设置有第一定位部件30,镐头组件2上设置有与第一定位部件30相互卡接的第二定位部20,以使镐头组件2与固定组件3连接。
36.根据本发明提供的电镐装置,包括机体1、镐头组件2和固定组件3,其中,机体1内设置有安装空间10,镐头组件2安装在机体1上,镐头组件2相对于机体1可移动地设置,以对待加工部件施加冲击力;固定组件3,固定组件3安装在安装空间10内,固定组件3上设置有第一定位部件30,镐头组件2上设置有与第一定位部件30相互卡接的第二定位部20,以使镐头组件2与固定组件3连接。通过第一定位部件30与第二定位部20卡接,实现第一定位部件30嵌入镐头组件2中,使镐头组件2与固定组件3稳定连接,以避免镐头组件2在运转过程中脱离机体1,实现镐头组件2的运转稳定性。
37.在本发明提供的实施例中,第一定位部件30为电磁块,第二定位部20为与电磁块的至少部分相互卡接的卡槽21,卡槽21内具有与电磁块相对设置的电磁铁,以在电磁铁通电后,使电磁铁与电磁块相互排斥,以使镐头组件2与固定组件3分离。这样设置能够便于更换镐头组件2,便于镐头组件2的维修。
38.在具体实施的过程中,第一定位部件30上具有导向端面,固定组件3还包括:安装块31,安装块31上设置有用于容纳镐头组件2的容纳槽310,镐头组件2的至少部分沿导向端面的延伸方向插入容纳槽310内;安装块31沿安装空间10的延伸方向可移动地设置,以通过安装块31带动镐头组件2移动;第一弹性件32,第一弹性件32安装在容纳槽310的侧壁上,第一定位部件30与第一弹性件32连接,以通过第一弹性件32的弹性力带动第一定位部件30移动。这样设置能够通过第一弹性件32的弹性力对第一定位部件30施加压力,将第一定位部
件30压紧在第二定位部20内,同时,在安装镐头组件2的过程中,通过镐头组件2对第一弹性件32进行挤压,利用导向端面对镐头组件2i进行导向,以便于安装镐头组件2,省时省力且能够使镐头组件2稳固地与所述固定组件3连接。
39.具体地,容纳槽310的侧壁上设置有用于安装第一弹性件32的安装槽311,第二定位部20具有与安装槽311相对设置的卡槽21,第一定位部件30的至少部分卡接在卡槽21内。结构简单并且便于实施。
40.为了便于镐头组件2的更换,卡槽21内设置有电磁铁,第一定位部件30为与电磁铁相配合的电磁块,电磁铁与电磁块相对设置。当需要更换镐头组件2时,将电磁铁通电,使电磁铁与电磁块相互排斥,以将镐头组件2由固定组件3内抽出。
41.在具体实施的过程中,固定组件3还包括:第二弹性件33,第二弹性件33的第一端与安装空间10的顶壁连接,第二弹性件33的第二端与安装块31连接,以通过第二弹性件33的弹性力推动安装块31移动。这样设置使安装块31向上移动后,利用第二弹性件33的弹性力推动安装块31向下运动,以实现安装块31的往复运动。
42.具体地,电镐装置还包括:动力组件4,动力组件4安装在安装空间10内,动力组件4与镐头组件2相对设置;动力组件4具有冲击块40,冲击块40沿安装空间10的延伸方向可移动地设置,以通过冲击块40推动镐头组件2移动。具体地,冲击块40与安装块31接触,以对安装块31施加作用力,其中,安装块31与冲击块40接触的接触面上设置有垫片35,垫片35提供阻尼效果,防止冲击块40往复运动碰撞发生损坏,安装块31的接触面上还设置有第二压力传感器34,以检测冲击块40对安装块31施加的冲击力。
43.在本发明提供的实施例中,冲击块40具有电磁性,动力组件4还包括:第一电磁铁41,第一电磁铁41设置在安装空间10的内壁上;第二电磁铁42,第二电磁铁42设置在安装空间10的内壁上,第二电磁铁42位于第一电磁铁41的下方,以通过第一电磁铁41和第二电磁铁42的磁性力带动冲击块40往复运动。
44.动力组件4还包括:电磁铁箱43,电磁铁箱43安装在安装空间10的底部并位于第二电磁铁42的下方;第一压力传感器44,第一压力传感器44设置在电磁铁箱43与冲击块40接触的接触面上,以用于感应冲击块40的压力。其中,机体1的下方设置有下盖5,机体1上方设置有上盖6,以在上盖6、下盖5和机体1之间围成安装空间10,。
45.具体地,如图4至图6所示,当冲击块40挤压第一压力传感器44时,电磁铁箱43提供排斥力,第一电磁铁41提供吸引了,第二电磁铁42关闭,当冲击块40上升至顶部,对第二压力传感器34施加压力时,电磁铁箱43提供吸引力,第一电磁铁41关闭,第二电磁铁42提供吸引力,使冲击块40向下运动,实现冲击块40的活塞运动。
46.进一步地,镐头组件2包括:镐头23,用于与待加工部件接触;连接件24,连接件24上设置有螺纹孔,镐头23上设置有外螺纹,以使镐头23与连接件24螺纹连接;其中,第二定位部20设置在连接件24上。
47.本发明还提供了一种机器人,如图7至图10所示,机器人包括电镐装置,电镐装置为上述实施例的电镐装置。
48.机器人包括:第一扭转机构300,第一扭转机构300的至少部分绕第一预定轴线可转动地设置,电镐装置100与第一扭转机构300连接,以使第一扭转机构300带动电镐装置100绕第一预定轴线转动。具体地,第一扭转机构300包括第一驱动电机301、支撑板302、底
板303和第一角度传感器304,其中,第一驱动电机301的驱动轴与电镐装置100连接,以驱动电镐装置100转动,支撑板302设置在电镐装置100的侧方,支撑板302上设置有供驱动轴穿过的穿过孔,驱动轴的至少部分穿过穿过孔与电镐装置100连接,具体地,电镐装置100上安装有第一角度传感器304,通过第一角度传感器304感应电镐装置100的转动角度。
49.机器人还包括:第二扭转机构400,第一扭转机构300与第二扭转机构400连接,第二扭转机构400绕第二预定轴线可转动地设置,以带动第一扭转机构300转动;其中,第一预定轴线与第二预定轴线相互垂直。优选地,第一扭转机构300通过底板303与第二扭转机构400连接,第二扭转机构400包括第二驱动电机401,第二驱动电机401与底板303驱动连接,以驱动底板303转动,进而驱动第一扭转机构300转动,以使电镐装置100转动。
50.为了增加电镐装置100的连接稳定性,机器人还包括固定机构200,固定机构200设置在电镐装置100的底部,第一扭转机构300与固定机构200铰接;固定机构200包括:固定块201,电镐装置100的下盖与固定块201固定连接,固定块201上还具有紧固部202,紧固部202环绕电镐装置100设置;抱紧件203,抱紧件203设置在紧固部202的外侧,紧固部202上设置有第一连接孔,抱紧件203上设置有第二连接孔,以使锁紧件的至少部分依次穿过第二连接孔和第一连接孔与电镐装置100抵接。其中,固定块201上具有旋转孔204,第一驱动电机301通过旋转孔204与固定块201连接。
51.为了增加电镐装置100的工作范围,机器人还包括:支撑架500,支撑架500绕第三预定轴线可转动地设置,电镐装置100与支撑架500连接,以使支撑架500带动电镐装置100移动;其中,支撑架500上设置有驱动丝杠501,驱动丝杠501的延伸方向与支撑架500的延伸方向一致,电镐装置100与驱动丝杠501连接,以使电镐装置100相对于支撑架500移动;顶推机构600,顶推机构600具有可伸缩设置的伸缩杆601,伸缩杆601与支撑架500铰接,以通过伸缩杆601带动支撑架500转动。支撑架500通过铰接板504安装在行走底盘800上,当伸缩杆601伸缩时,带动支撑架500相对于行走底盘800转动,具体地,顶推机构600通过铰接块602与支撑架500铰接,以便于顶推机构600带动支撑架500转动。
52.其中,第一扭转机构300和第二扭转机构400通过连接板402与驱动丝杠501连接,具体地,第一扭转机构300位于第二扭转机构400的上方,连接板402位于第一扭转机构300与第二扭转机构400之间,支撑架500顶部设置有第三驱动电机502,第三驱动电机502与驱动丝杠501驱动连接,以通过驱动丝杠501带动连接板移动;同时,支撑架500还可以带动电镐装置100转动。支撑架500上设置有第二角度传感器503,以检测支撑架500的转动角度。
53.为了增加对机器人的自动化控制,在本发明提供的机器人中,机器人还包括:激光测距仪700,激光测距仪700安装在电镐装置100的底部并与待加工部件相对;具体地,激光测距仪700可安装在固定块201的侧面;行走底盘800,支撑架500和顶推机构600均设置在行走底盘800上;视觉拍照机构900,视觉拍照机构900设置在行走底盘800的侧面上,以通过将视觉拍照机构900所拍摄的图片信息传送至控制系统,确定行走底盘800的工作位置。
54.利用本发明提供的机器人,使在利用电镐装置进行打凿作业时,无需人工手持,对于较高位置的打凿,避免了石块等杂物掉落砸伤工作人员的危害,且电镐装置100具有多个自由度,增加了电镐装置的活动范围,利用激光测距仪还能够实时反馈电镐装置100与待加工部件之间的距离,在具体工作时,机器人在bim地图的指引下到达指定工作区域,利用视觉拍照机构900完成机器人本体的定位,之后通过第一扭转机构300、第二扭转机构400、支
撑架500和驱动丝杠501带动电镐装置移动,实现电镐装置对工作区域内的不同位置的待加工部件进行打凿。
55.从以上的描述中,可以看出,本发明上述的实施例实现了如下技术效果:
56.根据本发明提供的电镐装置,包括机体1、镐头组件2和固定组件3,其中,机体1内设置有安装空间10,镐头组件2安装在机体1上,镐头组件2相对于机体1可移动地设置,以对待加工部件施加冲击力;固定组件3,固定组件3安装在安装空间10内,固定组件3上设置有第一定位部件30,镐头组件2上设置有与第一定位部件30相互卡接的第二定位部20,以使镐头组件2与固定组件3连接。通过第一定位部件30与第二定位部20卡接,实现第一定位部件30嵌入镐头组件2中,使镐头组件2与固定组件3稳定连接,以避免镐头组件2在运转过程中脱离机体1,实现镐头组件2的运转稳定性。
57.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1