一种带有联动翻板式夹臂的伸缩式汽车搬运机器人车尾机架的制作方法
[0001]
本实用新型涉及一种停车技术,尤其是一种停车机器人技术,具体地说是一种一种带有联动翻板式夹臂的伸缩式汽车搬运机器人车尾机架。
背景技术:
[0002]
目前,停车场的搬运机器人大多采用两个夹持臂加一个大梁的结构,两个夹持臂在大梁上相向移动将车辆夹起,然后再通过行走装置带动车辆移动。此类搬运机器人需要一个能承重的钢结构大梁,而且最好是设计成能伸缩的大梁,为了保证刚度,大梁需要设计成较大较高的结构,这就导致机器人重量很大。另一方面,此类搬运机器人大多是从侧面插入车底,提升后为了防止倾覆,需要在夹持臂的远端加装防脱落机构,导致整体结构复杂笨重,同时,从侧面搬运还必须进行侧面停放,车辆只能一字形停放才能方便取放,地面利用率低,会出现需要顺序停放和搬出不便,需要反复挪车才能取出的问题,有必要加以改进,为此申请人设计了一种图1所示的伸缩式结构的带有翻板结构夹持臂的汽车搬运机器人,而要实现这一目标,则必须设计一种相配套的车尾机架结构。
技术实现要素:
[0003]
本实用新型的目的是针对现有的汽车搬动机器人结构复杂,重量重,取放不便的问题,设计一种带有联动翻板式夹臂的伸缩式汽车搬运机器人车尾机架,以满足机器人生产之急需。
[0004]
本实用新型的技术方案是:
[0005]
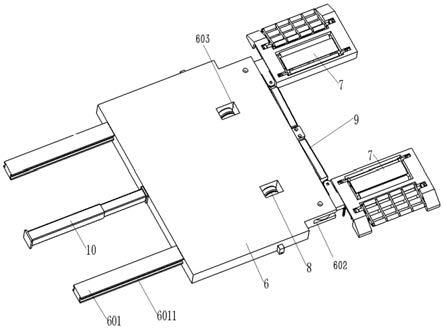
一种带有联动翻板式夹臂的伸缩式汽车搬运机器人车尾机架,其特征是它包括:车尾机架本体6,所述的车尾机架本体6的中间安装有车轮8,它靠近车头机架的一端安装有插入车头机架中的两个支架601和一个调距电缸10,调距电缸10的一端固定在车尾机架本体上,另一端固定在车头机架的调距电缸安装槽103中,两个支架601的侧面均设有供滚轮5滚动的导槽6011,在车尾机架本体的另一端安装有两个带联动翻板的旋转夹臂7,旋转夹臂7由夹持电缸9驱动作90度的来回转动。
[0006]
所述的旋转夹臂7连接有旋转支架710,旋转支架710的旋转部711枢装在车尾机架本体6上,旋转支架710通过夹持电机连接部712与夹持电缸9的驱动轴铰接相连;所述的旋转支架710安装在车尾机架本体6端部的旋转支架安装槽602。
[0007]
所述的车轮8安装在车尾机架本体6上的车轮安装槽603中。
[0008]
本实用新型的有益效果:
[0009]
本实用新型结构简单,紧凑。能适应各种轴距小车的搬运,夹持可靠。
[0010]
本实用新型采用从车头或车尾插入车身中进行搬运,可在任间停车位插入停放,也可在任意位置取出车辆。适用于车辆的非字形停放。
附图说明
[0011]
图1为本实用新型整体结构示意图;
[0012]
图2为本实用新型的带联动翻板结构的固定夹臂的结构示意图;
[0013]
图3为本实用新型的车尾机架本体的结构示意图;
[0014]
图4为本实用新型的旋转夹臂的结构示意图;
[0015]
图中,车头机架1,固定夹臂3,安装座300,轮毂限位座310,轮毂限位板320,联动机构330,复位弹簧334,控制台4,前端激光雷达401,光电传感器402,车尾机架本体6,支架601,导槽6011,带联动翻板的旋转夹臂7,旋转支架710,旋转部711,夹持电缸连接部712,车轮8,夹持电缸9,调距电缸10。
具体实施方式
[0016]
下面结合附图和实施例对本实用新型作进一步的说明。
[0017]
如图1-4所示。
[0018]
一种带有联动翻板式夹臂的伸缩式汽车搬运机器人车尾机架,它包括如图3所示的车尾机架本体6,所述的车尾机架本体6的中间安装有车轮8,它靠近车头机架的一端安装有插入车头机架中的两个支架601和一个调距电缸10,调距电缸10的一端固定在车尾机架本体上,另一端固定在车头机架的调距电缸安装槽103中,两个支架601的侧面均设有供滚轮5滚动的导槽6011,在车尾机架本体的另一端安装有两个带联动翻板的旋转夹臂7,旋转夹臂7由夹持电缸9驱动作90度的来回转动。所述的带联动翻板的旋转夹臂7的结构如图4所示,在联动夹臂的安装座300的一侧连接有旋转支架710,旋转支架710的旋转部711枢装在车尾机架本体6上,旋转支架710通过夹持电机连接部712与夹持电缸9的驱动轴铰接相连;所述的旋转支架710安装在车尾机架本体6端部的旋转支架安装槽602。所述的车轮8安装在车尾机架本体6上的车轮安装槽603中。所述的旋转夹臂7的主体部分的结构如图2所示,包括安装座300、轮毂限位座310、轮毂限位板320、联动机构330,所述轮毂限位座310,轮毂限位板320对应安装在安装座300上,所述联动机构330对称安装在安装座300的两侧,用以连接轮毂限位座310和轮毂限位版320,轮毂限位座310和轮毂限位板320均连接有复位弹簧334,具体实施时旋转夹臂7的主体部分还可采用申请人在先申请的相关结构加以实现。
[0019]
将本实用新型的车尾机架本体6与车前机加1组成后形成图1所示的机器人,该机器人的工作原理是:
[0020]
当车辆搬运机器人接收到控制中心的调度指令,即按照导航路径到达侯移停车区,首先通过调距电缸10来调整固定夹臂3、旋转夹臂7之间的距离,然后慢速向车辆移动,直至搬运车完全进入汽车的车底,固定夹臂3碰到汽车前端的轮胎,旋转夹臂7在夹持电缸9的控制下慢慢打开,直至与车尾机架6垂直。摆动到位后,车头机架1、车尾机架6开始收缩做夹持动作,为碰到轮胎前,保持架与叉臂表面齐平,当转轴接触到轮胎,转轴与轮胎之间发生相对转动,轮毂限位座310向近地端转动,轮胎继续向轮毂限位座310高处移动,直到移动超过轮毂限位座310的安装轴的中心,在这过程中由于凸轮限位座的限位作用,轮毂限位座310在到达最低点后就停止向近地端转动的趋势,随着轮胎超过轮毂限位座310中心,轮毂限位座310则沿着轮胎侧转动。随后凸轮限位座通过连接杆带动轮毂限位板320向上抬起,轮胎碰到轮毂限位版320上的第二转轴,从而起到限位的作用。直至光电传感器402检测到
车辆轮胎均已离地到合适的距离,则停止夹持,之后把车辆拖移到指定的车位。
[0021]
上述具体实施方式,仅为说明本实用新型的技术构思和结构特征,目的在于让熟悉此项技术的相关人士能够据以实施,但以上内容并不限制本实用新型的保护范围,凡是依据本实用新型的精神实质所作的任何等效变化或修饰,均应落入本实用新型的保护范围之内。
[0022]
本实用新型未涉及部分均与现有技术相同或可采用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1