一种基于混凝土搅拌机的自动填料系统
1.本实用新型属于建筑工程施工技术领域,尤其涉及一种基于混凝土搅拌机的自动填料系统。
背景技术:
2.混凝土搅拌机作为建筑施工中一样必不可少的工具,目前在工程施工技术领域得到了广泛的应用。随着科技的发展,施工技术正逐渐向自动化方向发展。然而,现有技术中,搅拌机填料过程通常由工人手动完成。因此,填料过程存在施工效率低、人工成本高的缺陷。
技术实现要素:
3.本实用新型的目的在于提供一种基于混凝土搅拌机的自动填料系统,可对混凝土搅拌机进行自动填料。为实现上述目的,本实用新型采用如下技术方案:
4.一种基于混凝土搅拌机的自动填料系统,包括:
5.一下水平传送带组件,所述下水平传送带组件包括一第一带轮和一第一传送带;所述第一带轮安装在第一支架上;所述第一传送带远离所述混凝土搅拌机的出料口;
6.一倾斜传送带组件,所述倾斜传送带组件包括第二传送带和第二带轮;所述第二传送带套设在所述第一带轮和第二带轮之间;
7.一上水平传送带组件,所述上水平传送带组件包括第三传送带;所述第三传送带靠近所述第二传送带的一段套设于所述第二带轮;所述第三传送带靠近所述混凝土搅拌机的出料口;所述第三传送带沿x向运行;
8.一自动填料装置,所述自动填料装置设置在所述混凝土搅拌机的出料口和所述第三传送带之间;所述自动填料装置包括一料箱,所述料箱的上端敞开;所述料箱靠近出料口的一侧面转动安装一顶板;所述料箱的内壁上固定一液压杆;所述液压杆的输出端连接所述顶板;所述顶板处于水平位置时,所述顶板与所述第三传送带平齐且所述顶板与所述第三传送带的一端接触。
9.优选地,进一步包括一重力传感器,所述重力传感器固定在所述料箱上并与一控制装置信号连接。
10.优选地,所述下水平传送带组件、倾斜传送带组件和上传送带组件均安装在支撑架上。
11.优选地,所述料箱安装在一承重支撑架上。
12.优选地,所述料箱的内部中空且所述料箱的底面敞开。
13.优选地,进一步包括一u型伸缩杆,所述伸缩杆包括依次连接的上段、连接段和下段;
14.所述下段固定在所述料箱的后侧面;所述下段包括第一伸缩节段和套设在所述第一伸缩节段上的第二伸缩节段;所述第二伸缩节段上安装一电机;
15.所述上段高于所述料箱;所述上段固定一推板;所述推板可沿y向移动。
16.优选地,所述下段朝所述u型伸缩杆的下侧延伸;所述下段的末端固定一横杆;所述横杆固定在所述料箱的后侧面;所述横杆固定在所述承重支撑架的后侧面;所述横杆包括第一伸缩节杆和套设在所述第一伸缩节杆上的第二伸缩节杆;所述第二伸缩节杆上安装一电机。
17.优选地,所述料箱的前侧面连接一滑板;所述滑板倾斜设置。
18.与现有技术相比,本实用新型的优点为:
19.(1)在控制装置的作用下,载料箱可自动将由下水平传送带组件、倾斜传送带组件和上水平传送带组件运送至自动填料装置的顶板上,再由顶板和液压杆配合,将载料箱内的原料由载料箱的出料口处投入混凝土搅拌机中,即实现自动填料。
[0020] (2)当料箱处的重力传感器的值大于控制装置预先设置的设定值时,自动填料装置的液压杆启动,液压杆升起,载料箱中的原料在重力的作用下被投入混凝土搅拌机内。当重力传感器的值低于设定值时,液压杆降下,顶板回到水平状态,此时上段和横杆上的电机启动,横杆和上段在电机的作用下开始收缩,继而带动推板将已经空置的载料箱沿y向推出顶板,载料箱沿滑板滑下以便于回收。
附图说明
[0021]
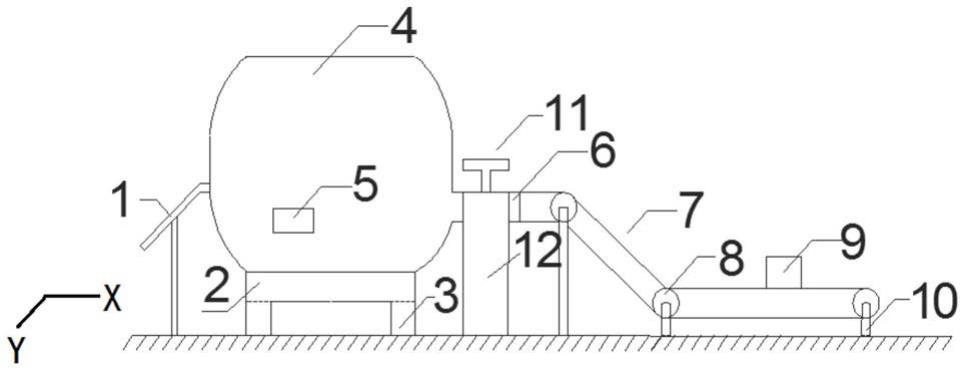
图1为本实用新型一实施例的基于混凝土搅拌机的自动填料系统的前视图;
[0022]
图2为图1中料箱、液压杆的位置关系图;
[0023]
图3为图1中自动填料装置处的侧视图。
[0024]
其中,1
‑
滑槽,2
‑
置物箱,3
‑
搅拌机支撑,4
‑
混凝土搅拌机,5
‑
定时器,6
‑
自动填料装置,61
‑
料箱,7
‑
倾斜传送带组件,8
‑
第一带轮,9
‑
载料箱,10
‑
支撑架,11
‑
推箱装置,12
‑
滑板,13
‑
重力传感器,14
‑
液压杆,15
‑
顶板,16
‑
推板,17
‑
承重支撑架,18
‑
电机,19
‑
连接段,20
‑
横杆,21
‑
上段。
具体实施方式
[0025]
下面将结合示意图对本实用新型进行更详细的描述,其中表示了本实用新型的优选实施例,应该理解本领域技术人员可以修改在此描述的本实用新型,而仍然实现本实用新型的有利效果。因此,下列描述应当被理解为对于本领域技术人员的广泛知道,而并不作为对本实用新型的限制。
[0026]
如图1~3所示,一种基于混凝土搅拌机4的自动填料系统,包括自右向左依次设置的下水平传送带组件、倾斜传送带组件7、上水平传送带组件和自动填料装置6。
[0027]
下水平传送带组件包括第一带轮8和第一传送带;第一带轮8安装在第一支架上;第一传送带远离混凝土搅拌机4的出料口。第一传送带沿x向运行。
[0028]
倾斜传送带组件7包括第二传送带和第二带轮;第二传送带套设在第一带轮8和第二带轮之间。
[0029]
上水平传送带组件包括第三传送带;第三传送带靠近第二传送带的一段套设于第二带轮;第三传送带靠近混凝土搅拌机4的出料口;第三传送带沿x向运行。
[0030]
自动填料装置6设置在混凝土搅拌机4的出料口和第三传送带之间。自动填料装置
6包括一料箱61,料箱61上固定一重力传感器13;重力传感器13与一控制装置信号连接。料箱61的上端敞;料箱61靠近出料口的一侧面转动安装一顶板15;料箱61的内壁上固定一与控制装置信号连接的液压杆14;液压杆14的输出端连接顶板15;顶板15处于水平位置时,顶板15与第三传送带平齐且顶板15与第三传送带的一端接触。
[0031]
在本实施例中,下水平传送带组件、倾斜传送带组件7和上传送带组件均安装在支撑架10上;料箱61安装在一承重支撑架17上。下水平传送带组件、倾斜传送带组件7和上传送带组件的结构均为现有技术,在此不再赘述。
[0032]
在本实施例中,混凝土搅拌机4的出料口处安装一滑槽1,方便集中出料,有效避免混凝土从出料口外溢所造成的浪费现象。混凝土搅拌机4安装在一搅拌机支撑3上;搅拌机支撑3上设有置物箱2,可以用于在该混凝土搅拌机4的运输过程中存放自动填料装置6、下水平传送带组件、倾斜传送带组件7和上传送带组件。
[0033]
在本实施例中,进一步增设推箱装置11并对料箱61的结构进行设计。
[0034]
具体的,料箱61的内部中空且料箱61的底面敞开。
[0035]
推箱装置11包括u型伸缩杆;伸缩杆包括依次连接的上段21、连接段19和下段;下段固定在料箱61的后侧面;下段包括第一伸缩节段和套设在第一伸缩节段上的第二伸缩节段;第二伸缩节段上安装一与控制装置信号连接的电机18;上段21高于料箱61;上段21固定一推板16;推板16可沿y向移动。进一步地,下段朝u型伸缩杆的下侧延伸;下段的末端固定一横杆20;横杆20固定在料箱61的后侧面;横杆20固定在承重支撑架17的后侧面;横杆20包括第一伸缩节杆和套设在第一伸缩节杆上的第二伸缩节杆;第二伸缩节杆上安装一电机18。
[0036]
在本实施例中,料箱61的前侧面连接一滑板12;滑板12倾斜设置。
[0037]
本实用新型的工作原理为:
[0038]
(1)在搅拌机支撑3上设有定时器5,电源固定在搅拌机支撑3上,定时器5与电源电连接以设定混凝土的搅拌时间,定时器5和控制装置配合,以实现定时关闭混凝土搅拌机4。混凝土搅拌机4的进料口后方依次设置自动填料装置6、上传送带组件、倾斜传送带组件7和下水平传送带组件通过控制装置启动上传送带组件、倾斜传送带组件7和下水平传送带组件,载料箱9可自动由下水平传送带组件运送自动填料装置6处于水平状态的顶板15上。
[0039]
(2)当料箱61处的重力传感器13的值大于控制装置预先设置的设定值时,自动填料装置6的液压杆14启动,液压杆14升起,载料箱9中的原料在重力的作用下被投入混凝土搅拌机4内;
[0040]
(3)当重力传感器13的值低于设定值时,液压杆14降下,顶板15回到水平状态,此时下段和横杆20上的电机18启动,横杆20和下段在电机18的作用下开始收缩,继而带动推板16将已经空置的载料箱9沿y向推出顶板15,载料箱9沿滑板12滑下以便于回收。
[0041]
上述仅为本实用新型的优选实施例而已,并不对本实用新型起到任何限制作用。任何所属技术领域的技术人员,在不脱离本实用新型的技术方案的范围内,对本实用新型揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本实用新型的技术方案的内容,仍属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1