一种全自动刷墙机器人
1.本发明涉及一种刷墙装置,特别涉及一种全自动刷墙机器人。
背景技术:
2.随着时代飞速发展,创新竞争成为时代的新趋势。建筑行业发展飞快,市场需求大。刷墙机器人可实现自动化代替手工。
3.现有的刷墙机器人只局限于室内装修机器人,且机器人只能在固定位置通过升降系统控制,无法实现全自动化,并且外观略显笨重;而且喷漆覆盖面小,并且吸附在墙面移动速度不稳定,容易受到天气的影响;在粉刷的过程中也导致了存在极大的安全隐患,如机器人脱落导致的工人的危险,以及行人的危险;并且增大了劳动强度、降低了劳动效率,也会导致原料的浪费,以及工期的延长。
技术实现要素:
4.本发明要解决的技术问题是克服现有技术的缺陷,提供一种全自动刷墙机器人。
5.为了解决上述技术问题,本发明提供了如下的技术方案:
6.本发明一种全自动刷墙机器人,包括承载主体,其中,
7.所述承载主体的顶部安装有探测机构;
8.所述探测机构包括第一探测机构和第二探测机构,其中,
9.所述第一探测机构和所述第二探测机构均位于所述探测机构的同一侧;
10.所述承载主体的顶部安装有承载台,其中,
11.所述承载台的顶部安装有喷涂装置;
12.所述承载台的一侧设置有控制机构,其中,
13.所述控制机构位于所述探测机构与所述承载台之间;
14.所述承载台的另一侧设置有稳固装置,其中,
15.所述稳固装置设置于所述承载主体顶部的边缘。
16.作为本发明的一种优选技术方案,所述承载主体的两边侧安装有行走机构,其中,
17.所述行走机构包括履带和吸附装置。
18.作为本发明的一种优选技术方案,所述承载主体的顶部安装有储能机构,其中,
19.所述储能机构位于所述探测机构的一侧。
20.作为本发明的一种优选技术方案,所述稳固装置为真空发生器,其中,
21.所述稳固装置与所述吸附装置相连通。
22.作为本发明的一种优选技术方案,所述第一探测机构为激光探测器;
23.所述第二探测机构为录像设备。
24.作为本发明的一种优选技术方案,所述控制机构为单片机;
25.所述储能机构为太阳能板,其中,
26.所述储能机构电性连接所述探测机构及所述探测机构包含的第一探测机构和第
二探测机构、所述喷涂装置、所述控制机构、所述稳固装置、所述履带和所述吸附装置;
27.所述控制机构电性连接所述探测机构、所述喷涂装置、所述稳固装置、所述履带和所述吸附装置。
28.作为本发明的一种优选技术方案,所述喷涂装置为无气喷涂机;
29.所述吸附装置为真空吸盘。
30.本发明所达到的有益效果是:本发明实现了避免大型建筑粉刷、家庭粉刷过程中发生事故,降低危险,保护工人的人身安全,降低劳动强度,提高效率,节省原料,缩短建筑周期;可以根据空间地图以及粉刷的需求设定好程序,避免不需要喷漆的地方,来实现全自动刷墙;避免大型建筑粉刷、家用粉刷过程中发生事故,降低危险,提高效率;第一探测机构(激光距离探测器),可自动躲避障碍;第二探测机构(录像设备)可以工作全程录像;两边侧均有履带以及吸附装置、可以保持平衡;采用太阳能电池板作为储能机构提供能源动力,环保无污染;在室外高空作业时,可以通过控制机构实现无线控制,不会存在因动力能源不足而停止作业;减少事故的发生,提高效率,降低危险;成本低,可以批量生产。
附图说明
31.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
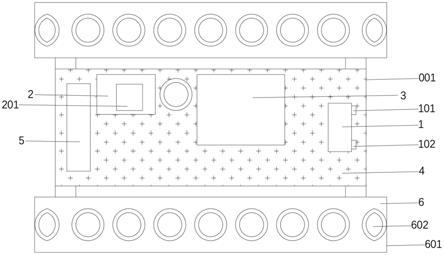
32.图1是本发明的结构示意图之一;
33.图2是本发明的结构示意图之二;
34.图中:1、探测机构;101、第一探测机构;102、第二探测机构;2、承载台;201、喷涂装置;3、控制机构;4、储能机构;5、稳固装置;6、行走机构;601、履带;602、吸附装置。
具体实施方式
35.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
36.实施例
37.如图1
‑
2所示,本发明提供一种全自动刷墙机器人,包括承载主体001,其中,
38.承载主体001的顶部安装有探测机构1;探测机构1包括第一探测机构101和第二探测机构102,其中,第一探测机构101和第二探测机构102均位于探测机构 1的同一侧,第一探测机构101为激光探测器,第二探测机构102为录像设备,第一探测机构101和第二探测机构102安装在同一侧,可以实现在喷涂的时候,第一探测机构101可以检测障碍、第二探测机构102可以对全程进行记录;
39.承载主体001的顶部安装有承载台2,其中,承载台2的顶部安装有喷涂装置201,可以实现喷涂的作用;
40.承载台2的一侧设置有控制机构3,其中,控制机构3位于探测机构1与承载台 2之间,控制机构3为单片机,可以编写刷墙程序,实现全自动刷墙,按照构建建筑的空间地图以及粉刷需求输入编写程序,来达到全自动刷墙的目的;
41.承载台2的另一侧设置有稳固装置5,其中,稳固装置5设置于承载主体001顶部的边缘,稳固装置5为真空发生器,其中,稳固装置5与吸附装置602相连通,稳固装置5可以实
现辅助吸附装置602(真空吸盘)实现真空吸附的作用(效果)。进一步的,承载主体001的两边侧安装有行走机构6,其中,行走机构6包括履带601和吸附装置602,吸附装置602为真空吸盘,履带601行走的时候,吸附装置(真空吸盘)可以实现对墙面的吸附,以便喷涂装置201进行喷涂作业。具体的,承载主体001的顶部安装有储能机构4,其中,储能机构4位于探测机构1的一侧,可以给探测机构1及探测机构1包含的第一探测机构101和第二探测机构102、喷涂装置201、控制机构3、稳固装置5、履带601和吸附装置602 提供电源以便运转;
42.第一探测机构101为激光探测器,第二探测机构102为录像设备,可以实现在喷涂的时候,第一探测机构101可以检测障碍、第二探测机构102可以对全程进行记录;
43.控制机构3为单片机,可以编写刷墙程序,实现全自动刷墙,按照构建建筑的空间地图以及粉刷需求输入编写程序,来达到全自动刷墙的目的;
44.储能机构4为太阳能板,其中,储能机构4电性连接探测机构1及探测机构1包含的第一探测机构101和第二探测机构102、喷涂装置201、控制机构3、稳固装置5、履带601和吸附装置602,可以给探测机构1及探测机构1包含的第一探测机构101和第二探测机构102、喷涂装置201、控制机构3、稳固装置5、履带601和吸附装置602提供电源以便运转;
45.控制机构3电性连接探测机构1、喷涂装置201、稳固装置5、履带601和吸附装置602,可以方便控制机构3对探测机构1、喷涂装置201、稳固装置5、履带 601和吸附装置602实现控制,并且也方便通过控制机构3实现无线(远程)控制。喷涂装置201为无气喷涂机,可以实现更好的进行喷涂作业。
46.本实施例在进行运转(使用)的时候,承载主体001的顶部安装有探测机构1;探测机构1包括第一探测机构101和第二探测机构102,其中,第一探测机构101 和第二探测机构102均位于探测机构1的同一侧,第一探测机构101为激光探测器,第二探测机构102为录像设备,第一探测机构101和第二探测机构102安装在同一侧,可以实现在喷涂的时候,第一探测机构101可以检测障碍、第二探测机构102可以对全程进行记录;承载台2的顶部安装有喷涂装置201,可以实现喷涂的作用;承载台2的一侧设置有控制机构3,其中,控制机构3位于探测机构1与承载台2之间,控制机构3为单片机,可以编写刷墙程序,实现全自动刷墙,按照构建建筑的空间地图以及粉刷需求输入编写程序,来达到全自动刷墙的目的;稳固装置5设置于承载主体001顶部的边缘,稳固装置5为真空发生器,其中,稳固装置5与吸附装置602相连通,稳固装置5可以实现辅助吸附装置 602(真空吸盘)实现真空吸附的作用(效果);承载主体001的两边侧安装有行走机构6,其中,行走机构6包括履带601和吸附装置602,吸附装置602为真空吸盘,履带601行走的时候,吸附装置(真空吸盘)可以实现对墙面的吸附,以便喷涂装置201进行喷涂作业;控制机构3为单片机,可以编写刷墙程序,实现全自动刷墙,按照构建建筑的空间地图以及粉刷需求输入编写程序,来达到全自动刷墙的目的;喷涂装置201为无气喷涂机,可以实现更好的进行喷涂作业。
47.本发明实现了避免大型建筑粉刷、家庭粉刷过程中发生事故,降低危险,保护工人的人身安全,降低劳动强度,提高效率,节省原料,缩短建筑周期;可以根据空间地图以及粉刷的需求设定好程序,避免不需要喷漆的地方,来实现全自动刷墙;避免大型建筑粉刷、家用粉刷过程中发生事故,降低危险,提高效率;第一探测机构(激光距离探测器),可自动躲避障碍;第二探测机构(录像设备)可以工作全程录像;两边侧均有履带以及吸附装置、可以保持平衡;采用太阳能电池板作为储能机构提供能源动力,环保无污染;在室外高空作业
时,可以通过控制机构实现无线控制,不会存在因动力能源不足而停止作业;减少事故的发生,提高效率,降低危险;成本低,可以批量生产。
48.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1