一种基于建筑墙体外立面机器人索驱喷涂结构的制作方法
1.本实用新型具体涉及一种基于建筑墙体外立面机器人索驱喷涂结构。
背景技术:
2.目前,现有的喷涂机器人大多数都是在室内施工,即便有外墙施工,也必须借助吊篮或脚手架等辅助设备由人工亲自操作完成,不仅施工范围和工作方式受到一定限制,并且由于建筑高达几十米甚至上百米,工人在高空施工容易发生危险,每年因在外墙施工造成的安全事故。
3.况且,部分涂料中掺杂大量有害化学物质,会对工人的身体健康带来潜在危险,如若工人长期在此环境中工作,有极大可能会造成身体伤害或患上职业病。
4.而在高空作业时,工人除了控制施工质量,还要时刻注意安全,工作效率会明显降低,
5.至此研制一种远程控制的高空喷涂装置迫在眉睫。
6.虽然现在也有一些高空喷涂机器人,还配备有摄像头,可以实时传递工作画面,使用者可以根据摄像头传递的画面进行相应的操作,但是当光线较暗或晚上施工时,会严重影响摄像头传输画面的质量,从而影响使用者的操作,虽然有部分使用者后期在现有设备上增加了照明装置,但由于喷涂机器人在工作时会飞溅出很多涂料,这些涂料会落在照明装置的灯头上并将其覆盖,影响照明效果,且本装置在高空中工作,使用者无法在工作过程中对灯头进行擦拭。
7.因此,我们提供一种基于建筑墙体外立面机器人索驱喷涂结构。
技术实现要素:
8.本实用新型为克服上述情况不足,旨在提供一种能解决上述问题的技术方案。
9.一种基于建筑墙体外立面机器人索驱喷涂结构,包括建筑物,所述建筑物上面固定有第一骑墙支撑架、第二骑墙支撑架、第三骑墙支撑架25、第四骑墙支撑架,第一骑墙支撑架设于建筑物左下端,第二骑墙支撑架设于建筑物右下端,第一骑墙支撑架与第二骑墙支撑架设于同一水平方向,第三骑墙支撑架设于建筑物做上端,第四骑墙支撑架设于建筑物有上端,第三骑墙支撑架与第四骑墙支撑架设于同一水平方向,第一骑墙支撑架顶部固定有第一卷扬机,第二骑墙支撑架顶部固定有第二卷扬机,第三骑墙支撑架顶部固定有第三卷扬机,第四骑墙支撑架顶部固定有第四卷扬机,第一卷扬机连接有第一钢丝绳拉索,第二卷扬机连接有第二钢丝绳拉索,第三卷扬机连接有第三钢丝绳拉索,第四卷扬机连接有第四钢丝绳拉索,第一钢丝绳拉索一端连接有第一轴承,第二钢丝绳拉索一端连接有第二轴承,第三钢丝绳拉索一端连接有第三轴承,第四钢丝绳拉索一端连接有第四轴承,第一轴承、第二轴承、第三轴承和第四轴承另一端连接有喷涂装置。
10.优选的,喷涂装置后端中部设有红外识别装置,喷涂装置前端中部设有料管,喷涂装置下端设有伸缩喷枪,料管一端连接伸缩喷枪。
11.优选的,所述第一卷扬机、第二卷扬机、第三卷扬机和第四卷扬机为带有蜗杆减速器的卷扬机。
12.优选的,第一骑墙支撑架底部左侧水平设有第一伸缩杆,第一伸缩杆一端连接第一骑墙支撑架,第一伸缩杆连接第一钢丝绳拉索;
13.第二骑墙支撑架底部右侧水平设有第二伸缩杆,第二伸缩杆一端连接第二骑墙支撑架,第二骑墙支撑架另一端连接第二钢丝绳拉索;
14.第三骑墙支撑架底部左侧水平设有第三伸缩杆,第三伸缩杆一端连接第三骑墙支撑架,第三骑墙支撑架另一端连接第三钢丝绳拉索;
15.第四骑墙支撑架底部右侧水平设有第四伸缩杆,第四伸缩杆一端连接第四骑墙支撑架,第四伸缩杆另一端连接第四钢丝绳拉索。
16.与现有技术相比,本实用新型的有益效果是:该基于建筑墙体外立面机器人索驱喷涂结构,通过在建筑物上面固定骑墙支撑架,能够设置伸缩机构和带有蜗杆减速器的卷扬机,通过设置伸缩机构和带有蜗杆减速器的卷扬,机能够带动钢丝绳拉索,通过钢丝绳拉索与轴承连接装配,能够让喷涂运动部分运动来带动上面设置红外识别控制装置运动识别窗洞口等,通过红外识别控制装置完成识别料管开始输送涂料,能够让料管开始输送涂料输送到可伸缩喷头,通过可伸缩喷头完成喷涂工作。
17.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
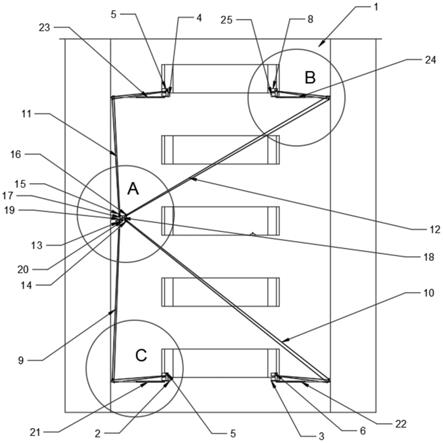
19.图1是本实用新型的结构示意图;
20.图2是本实用新型a处放大结构示意图;
21.图3是本实用新型图1中b处放大结构示意图;
22.图4是本实用新型图1中c处放大结构示意图。
23.图中:1、建筑物,2、第一骑墙支撑架,3、第二骑墙支撑架,4、第四骑墙支撑架,5、第一卷扬机,6、第二卷扬机,7、第三卷扬机,8、第四卷扬机,9、第一钢丝绳拉索,10、第二钢丝绳拉索,11、第三钢丝绳拉索,12、第四钢丝绳拉索,13、第一轴承,14、第二轴承,15、第三轴承,16、第四轴承,17、喷涂装置,18、红外线识别装置,19、料管,20、伸缩喷枪,21、第一伸缩杆,22、第二伸缩杆,23、第三伸缩杆,24、第四伸缩杆,25、第三骑墙支撑架。
具体实施方式
24.下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1~4,本实用新型实施例中,一种基于建筑墙体外立面机器人索驱喷涂结构,其包括包括建筑物1,所述建筑物1上面固定有第一骑墙支撑架2、第二骑墙支撑架3、第三骑墙支撑架25、第四骑墙支撑架4,第一骑墙支撑架2设于建筑物1左下端,第二骑墙支撑架3设于建筑物1右下端,第一骑墙支撑架2与第二骑墙支撑架3设于同一水平方向,第三骑墙支撑架25设于建筑物1做上端,第四骑墙支撑架4设于建筑物1有上端,第三骑墙支撑架25与第四骑墙支撑架4设于同一水平方向,第一骑墙支撑架2顶部固定有第一卷扬机5,第二骑墙支撑架3顶部固定有第二卷扬机6,第三骑墙支撑架25顶部固定有第三卷扬机7,第四骑墙支撑架4顶部固定有第四卷扬机8,第一卷扬机5连接有第一钢丝绳拉索9,第二卷扬机6连接有第二钢丝绳拉索10,第三卷扬机7连接有第三钢丝绳拉索11,第四卷扬机8连接有第四钢丝绳拉索12,第一钢丝绳拉索9一端连接有第一轴承13,第二钢丝绳拉索10一端连接有第二轴承14,第三钢丝绳拉索11一端连接有第三轴承15,第四钢丝绳拉索12一端连接有第四轴承16,第一轴承13、第二轴承14、第三轴承15和第四轴承16另一端连接有喷涂装置17。
26.优选的,喷涂装置17后端中部设有红外识别装置18,喷涂装置17前端中部设有料管19,喷涂装置17下端设有伸缩喷枪20,料管19一端连接伸缩喷枪20。
27.优选的,所述第一卷扬机5、第二卷扬机6、第三卷扬机7和第四卷扬机8为带有蜗杆减速器的卷扬机。
28.优选的,第一骑墙支撑架2底部左侧水平设有第一伸缩杆21,第一伸缩杆21一端连接第一骑墙支撑架2,第一伸缩杆21连接第一钢丝绳拉索9;
29.第二骑墙支撑架3底部右侧水平设有第二伸缩杆22,第二伸缩杆22一端连接第二骑墙支撑架3,第二骑墙支撑架3另一端连接第二钢丝绳拉索10;
30.第三骑墙支撑架25底部左侧水平设有第三伸缩杆23,第三伸缩杆23一端连接第三骑墙支撑架25,第三骑墙支撑架25另一端连接第三钢丝绳拉索11;
31.第四骑墙支撑架4底部右侧水平设有第四伸缩杆24,第四伸缩杆24一端连接第四骑墙支撑架4,第四伸缩杆24另一端连接第四钢丝绳拉索12。
32.工作原理:当该基于建筑墙体外立面机器人索驱喷涂结构使用时,在涂料喷涂工作时,涂料经过料管,然后通过红外识别装置识别窗洞口及窗间墙,同时伸缩喷头通过喷涂装置及第一卷扬机5、第二卷扬机6、第三卷扬机7、第四卷扬、第一伸缩杆21、第二伸缩杆22、第三伸缩杆23和第四伸缩杆24带动控制其运动速率等,来来完成一次喷涂,该过程持续进行反复,直到建筑墙体外立面喷涂完成。
33.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1