一种机器人吹尘系统的制作方法
1.本实用新型涉及陶瓷生产设备技术领域,尤其涉及一种机器人吹尘系统。
背景技术:
2.在卫生陶瓷生产过程中,产品质量的影响因素有许多,其中因工艺或其他原因造成的半成品外表面粉尘附着是一种影响产品质量的直观因素。为提高釉质喷涂后的附着力和粘附性,在产品上釉前会对产品进行除尘操作。在以往的除尘方式上,主要是采取人工除尘,即工人手持压缩喷枪对产品进行除尘操作,这种除尘方式下的工人长期暴露在高噪声,高粉尘的环境中,对工人的身体健康有着极大的影响,同时除尘效率也十分低下,造成了人员流失严重,同时由于人工操作的不确定性可能会导致产品质量的波动。
技术实现要素:
3.本实用新型所要解决的技术问题是克服现有技术中存在的不足,提供一种机器人吹尘系统,提高工作效率的同时,避免操作人员在粉尘环境下工作,降低了职业病的患病风险。
4.本实用新型是通过以下技术方案予以实现:
5.一种机器人吹尘系统,其特征在于,包括半封闭吹尘间、贯穿半封闭吹尘间设置的产品输送线以及设于半封闭吹尘间内的多个吹尘工位,所述半封闭吹尘间两侧相对开有吹尘间进口和吹尘间出口,所述产品输送线贯穿吹尘间进口和吹尘间出口设置,所述吹尘工位包括吹尘机器人以及安装于吹尘机器人上的喷枪,所述喷枪朝向产品输送线设置。
6.根据上述技术方案,优选地,所述吹尘工位设置有两组。
7.根据上述技术方案,优选地,所述产品输送线上方设有风刀,所述风刀位于半封闭吹尘间内并朝向产品输送线设置。
8.根据上述技术方案,优选地,所述风刀设置有3组,各风刀分别安装于吹尘间进口、吹尘间出口以及两吹尘机器人之间。
9.根据上述技术方案,优选地,所述产品输送线上分别设有一号阻挡器、二号阻挡器以及三号阻挡器,所述一号阻挡器位于吹尘间进口处,所述二号阻挡器和三号阻挡器分别相对两吹尘工位设置。
10.根据上述技术方案,优选地,所述半封闭吹尘间向外通过吸尘管道连通有负压风机。
11.本实用新型的有益效果是:
12.本实用新型通过对吹尘机器人的应用,可以快速、精准的对产品进行吹尘作业,实现了自动化除尘,有效提高工作效率,除此之外,工作人员被隔离在半封闭吹尘间外,可避免给操作工人呼吸系统带来伤害,改善了工人的工作环境,降低了职业病的患病风险。
附图说明
13.图1是本实用新型的系统布置图。
14.图2是本实用新型的主视结构示意图。
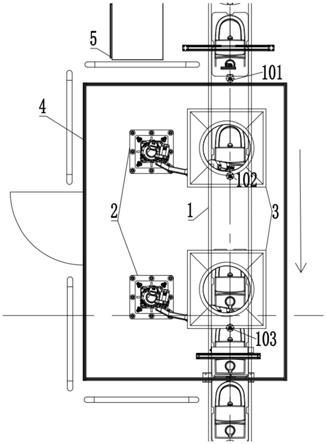
15.图3是本实用新型的俯视结构示意图。
16.图4是本实用新型吹尘工位的侧视结构示意图。
17.图5是本实用新型半封闭吹尘间的俯视结构示意图。
18.图中:1、产品输送线;101、一号阻挡器;102、二号阻挡器;103、三号阻挡器;2、吹尘机器人;3、负压风机;4、半封闭吹尘间;5、plc控制柜;6、风刀。
具体实施方式
19.为了使本技术领域的技术人员更好地理解本实用新型的技术方案,下面结合附图和最佳实施例对本实用新型作进一步的详细说明。
20.如图所示,本实用新型包括半封闭吹尘间4、贯穿半封闭吹尘间4设置的产品输送线1以及设于半封闭吹尘间4内的多个吹尘工位,所述半封闭吹尘间4两侧相对开有吹尘间进口和吹尘间出口,所述产品输送线1贯穿吹尘间进口和吹尘间出口设置,本例中吹尘工位设置有两组,所述吹尘工位包括吹尘机器人2以及安装于吹尘机器人2上的喷枪,所述喷枪朝向产品输送线1设置,其中半封闭吹尘间4正对吹尘机器人2的位置设置检修门,检修门设置有电气连锁的安全锁,本例中吹尘机器人2使用六轴机器人,六轴机器人下方设置有安装底座,安装底座下方与地面连接,安装底座上方与机器人本体连接,六轴机器人背部安装压缩空气吹尘管路,吹尘管路的一端连接在车间的压缩空气管路系统,另一端安装在机器人的手腕部位并与喷枪相连通。
21.根据上述实施例,优选地,所述产品输送线1上方设有风刀6,所述风刀6位于半封闭吹尘间4内并朝向产品输送线1设置,其中风刀6设置有3组,各风刀6分别安装于吹尘间进口、吹尘间出口以及两吹尘机器人2之间。本例中使用的风刀6为现有技术,风刀6连通高压旋涡鼓风机,向产品输送线1上的产品进行吹风,其中,布置于吹尘间进口和吹尘间出口的风刀6的喷吹角度均向半封闭吹尘间4内侧倾斜。
22.根据上述实施例,优选地,所述产品输送线1上分别设有一号阻挡器101、二号阻挡器102以及三号阻挡器103,所述一号阻挡器101位于吹尘间进口处,所述二号阻挡器102和三号阻挡器103分别相对两吹尘工位设置。各阻挡器的设置用来对产品进行分隔,以维持输送线的稳定运输,其中每个阻挡器前设置有光电开关或行程开关等检测开关,用来检测产品的具体位置及对相应的阻挡器进行控制。
23.根据上述实施例,优选地,所述半封闭吹尘间4向外通过吸尘管道连通有负压风机3,其中半封闭吹尘间4采用有机玻璃板制作,上方和侧后方设置有吸风口,在吸风口的位置与吸尘管道对接,当整个吹尘系统启动时,负压风机3随之启动,将半封闭吹尘间4内产品除尘后产生的粉尘进行外排处理。
24.本专利工作过程如下:待吹尘产品置放在工装板上,自上游输送线输送到产品输送线1,进入半封闭吹尘间4经由风刀6进行初道吹尘后,由二号阻挡器102阻挡至第一个吹尘工位,六轴机器人模仿工人动作夹持喷枪进行洗净面、内部管路和水箱内部吹尘,吹尘工作完成后关闭气源;完成上述步骤后,二号阻挡器102放行产品由输送线拖动经过风刀6后,
由三号阻挡器103阻挡至第二个吹尘工位,六轴机器人模仿工人动作夹持喷枪进行产品外表面吹尘,吹尘工作完成后关闭气源。
25.其中,半封闭吹尘间4外设置有plc控制柜5,上述工作过程可由plc自动控制系统控制,可实现手动、自动的切换。本例中阻挡器与除尘机器人的各连接配合之间的逻辑关系为现有技术,可通过编程实现。当产品传送至一号阻挡器101前,此时一号阻挡器101的检测开关检测到产品,系统根据第一个除尘工位的检测开关是否检测到产品来决定一号阻挡器101是否阻挡。当第一个除尘工位存在作业产品时,一号阻挡器101进行阻挡操作,防止产品向前输送对正在作业中的产品造成影响,反之,若第一个除尘工位为空时,一号阻挡器101则不进行阻挡操作。同理,当第一个除尘工位除尘完毕准备传送至第二个除尘工位进行除尘时,通过第二个除尘工位的检测开关是否检测到产品来判断二号阻挡器102是否阻挡。三号阻挡器103则通过吹尘机器人2作业的完成与否判断三号阻挡器103是否阻挡产品向后续工序进行输送。吹尘机器人2作业的时机把控由两个吹尘工位的产品是否到位决定。当产品到达吹尘工位时吹尘机器人2启动,喷枪开启围绕产品进行除尘作业,进行一个流程的吹尘操作后机器人复位,喷枪关闭,等待下一个产品的到位。
26.本实用新型通过对吹尘机器人2的应用,可以快速、精准的对产品进行吹尘作业,实现了自动化除尘,有效提高工作效率,除此之外,工作人员被隔离在半封闭吹尘间4外,可避免给操作工人呼吸系统带来伤害,改善了工人的工作环境,降低了职业病的患病风险。
27.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1