一种将滑动摩擦转换为滚动摩擦的行走装置的制作方法
1.本发明属于工装领域,尤其涉及一种将滑动摩擦转换为滚动摩擦的行走装置。
背景技术:
2.目前,支座在轨道上移动一般为面与面接触,主要克服滑动摩擦阻力,钢的滑动摩擦系数为0.15,而钢的滚动摩擦系数为0.05。以支座600kg为例,滑动摩擦约90kg摩擦力,而滚动摩擦约30kg摩擦力,转换之后能有效减少移动时需要克服的摩擦阻力,便于实现驱动
技术实现要素:
3.为了克服上述现有技术的不足之处,本发明提供一种将滑动摩擦转换为滚动摩擦的行走装置,该行走装置有效减少了移动过程中的摩擦阻力。
4.为实现上述目的,本发明采用如下技术方案:一种将滑动摩擦转换为滚动摩擦的行走装置,包括行走机构和驱动机构,所述行走机构包括支座、滚轮、偏心轴、轨道、转动杆,所述支座上穿设有若干偏心轴,偏心轴上设有滚轮,滚轮与铺设的轨道配合,至少一个偏心轴的端部设有转动杆,偏心轴的另一端同步连接;
5.所述驱动机构包括手轮、手轮轴、驱动齿轮、传动齿轮、传动套、传动轴、驱动轴、行走齿轮和齿条,所述支座内设置驱动轴,该驱动轴一端转动的设置在支座内,另一端与传动套通过键连接、通过螺纹与传动轴连接,所述驱动轴穿设在传动套内,并与传动套通过键连接,该传动套通过传动轴承设置在安装套内,安装套穿设在支座内,传动轴与传动套之前设有呈压缩状态的弹簧,传动轴上设有压紧螺钉,压紧螺钉上设有弹簧销,传动轴上设有与弹簧销配合的沉孔,所述传动套外设有传动齿轮,所述手轮通过手轮轴连接在支座上,手轮轴上设有驱动齿轮,驱动齿轮与传动齿轮啮合,所述驱动轴上设有行走齿轮,轨道上设有能与行走齿轮啮合的齿条。
6.在上述技术方案中,所述偏心轴之间通过连杆机构进行同步连接。
7.在上述技术方案中,所述偏心轴通过圆锥滚子轴承、偏心轴承压板与支座连接。
8.在上述技术方案中,所述滚轮与偏心轴之间设有深沟球轴承、滚轮轴承压板和滚轮紧定螺母。
9.在上述技术方案中,所述支座与转动杆之间设有转动杆紧定销。
10.在上述技术方案中,所述轨道上设有轨道垫板和轨道导向板。
11.在上述技术方案中,所述驱动轴通过滚针轴承、驱动轴套与支座连接。
12.在上述技术方案中,所述传动轴上设有方便拉动的把手。
13.在上述技术方案中,所述驱动轴上设有一组或多组啮合的行走齿轮和齿条。
14.在上述技术方案中,所述行走齿轮通过驱动齿轮紧定螺母进行锁紧。
15.本发明的有益效果是:可以实现摩擦力以及运动机构的转化,减少了运行阻力,从而降低了输入的驱动力,减少了磨损,并延长工装使用寿命。
附图说明
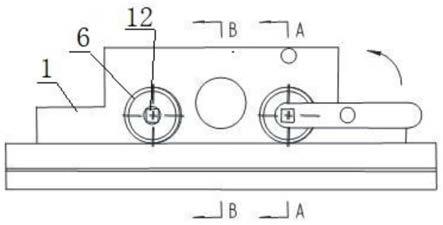
16.图1为本发明的省略结构正视图。
17.图2为图1中滚轮和偏心轴的示意图。
18.图3为图1中a
‑
a视图。
19.图4为图1中b
‑
b视图。
20.图5为图1中另一状态的示意图。
21.图6为图1的后视图。
22.其中:1.支座,2.转动杆紧定销,3.转动杆,4.轨道,5.轨道垫板,6.滚轮,7.滚轮轴承压板,8.滚轮深沟球轴承,9.滚轮紧定螺母,10.偏心轴承压板,11.圆锥滚子轴承,12.偏心轴,13.连杆a, 14.连杆b,15.凹槽滚轮,16.轨道导向板,17.齿条,18.安装套, 19.法兰,20.传动齿轮,21.传动套,22.弹簧销,23.压紧螺钉,24. 把手,25.传动轴,26.弹簧,27.传动齿轮紧定螺母,28.手轮轴,29. 手轮紧定螺母,30.手轮,31.驱动齿轮,32.传动轴承,33.驱动齿轮紧定螺母,34.行走齿轮,35.驱动轴,36.滚针轴承,37.驱动轴套。
具体实施方式
23.下面结合附图及具体实施例对本发明作进一步说明。
24.如图1至图6所示的一种将滑动摩擦转换为滚动摩擦的行走装置,包括行走机构和驱动机构,所述行走机构包括支座1、滚轮6、偏心轴12、轨道4、转动杆3,所述支座1上穿设有若干偏心轴12,偏心轴12上设有滚轮6,滚轮6与铺设的轨道4配合,至少一个偏心轴 12的端部设有转动杆3,偏心轴12的另一端同步连接;
25.所述驱动机构包括手轮30、手轮轴28、驱动齿轮31、传动齿轮 20、传动套21、传动轴25、驱动轴35、行走齿轮34和齿条17,所述支座1内设置驱动轴35,该驱动轴35一端转动的设置在支座1内,另一端与传动套21通过键连接、通过螺纹与传动轴25连接,所述驱动轴35穿设在传动套21内,并与传动套21通过键连接,该传动套 21通过传动轴承32设置在安装套18内,安装套18穿设在支座内,传动轴25与传动套21之前设有呈压缩状态的弹簧26,传动轴25上设有压紧螺钉23,压紧螺钉23上设有弹簧销22,传动轴25上设有与弹簧销22配合的沉孔,所述传动套21外设有传动齿轮20,所述手轮30通过手轮轴28连接在支座1上,手轮轴28上设有驱动齿轮 31,驱动齿轮31与传动齿轮20啮合,所述驱动轴35上设有行走齿轮34,轨道4上设有能与行走齿轮34啮合的齿条17。传动齿轮20 通过传动齿轮紧定螺母27进行锁紧,安装套18处设有与之配合的法兰19。
26.图2中,偏心轴的偏心状态为水平2毫米。
27.将转动杆3转动90
°
,并与支座锁定,偏心轴的偏心状态为竖直2毫米,通过转动杆3的转动,使支座与轨道接触或脱离。
28.在上述技术方案中,所述偏心轴12之间通过连杆机构进行同步连接。连杆机构即连杆a和连杆b。
29.在上述技术方案中,所述偏心轴12通过圆锥滚子轴承11、偏心轴承压板10与支座1连接。
30.在上述技术方案中,所述滚轮6与偏心轴之间设有滚轮深沟球轴承8、滚轮轴承压板7和滚轮紧定螺母9。
31.在上述技术方案中,所述支座1与转动杆3之间设有转动杆紧定销2。转动杆紧定销2可以锁定支座1与转动杆3。
32.在上述技术方案中,所述轨道4上设有轨道垫板5和轨道导向板 16。
33.在上述技术方案中,所述驱动轴35通过滚针轴承36、驱动轴套 37与支座1连接。
34.在上述技术方案中,所述传动轴25上设有方便拉动的把手24。
35.在上述技术方案中,所述驱动轴25上设有一组或多组啮合的行走齿轮34和齿条17。
36.在上述技术方案中,所述行走齿轮34通过驱动齿轮紧定螺母33 进行锁紧。
37.由于滚轮6两边都设置,将其中一边的实用带凹槽的凹槽滚轮 15,对该装置整体的运动方向更好控制。
38.图3中,支座1已被抬起,当支座1需要移动时,将转动杆3逆时针旋转90
°
并再次和支座1锁定,支座1被抬起;松开弹簧销22,拉动把手24指定位移,再将弹簧销22与传动轴25锁定,此时行走齿轮34与齿条17啮合,是附图4所示状态。转动手轮30,支座1 即可沿轨道方向移动。当支座1到达指定位置后,松开弹簧销22,推动把手24指定位移,再将弹簧销22与传动轴25锁定,此时行走齿轮34已与齿条17脱离。将转动杆3顺时针旋转90
°
并再次和支座1锁定,支座1即与轨道4贴合,便于支座1的定位。这样,就完成了支座的移动调节。
39.下面就本发明的可行性做相关计算说明。在整个过程中,通过人力需要实现:
40.1.转动杆3旋转90
°
,2.推拉把手24指定位移,3.转动手轮30。
41.1.转动杆3旋转时,主要是抬起支座即转动杆3逆时针旋转时需要克服支座重力,由经验知转动杆3水平时所需力距最大。设定支座总重m1=600kg,水平偏心距l1=2mm,转动杆3有效作用长度 l2=160mm,那么需要克服的最大力矩m2=m1=m1gl1=11.76n
·
m;转动时所需最大力即转动力需要大于73.5n。
42.2.推拉把手24时,主要克服传动轴25、驱动轴35的摩擦力,驱动轴35另一端与滚针轴承36间隙配合的摩擦力可忽略不计。设定传动轴25和驱动轴35总长l3=2000mm,轴直径d1=40mm,轴上附件(如齿轮)总重m2=5kg,滑动摩擦系数μ1=0.1,那么轴的重量需要克服的摩擦力f=μ1(m2+m3)g=36.2n,即推拉力需要大于36.2n。
43.3.开始转动手轮时,需要提供足够大的扭矩克服摩擦力和惯性力,此时所需扭矩最大。设定支座总重m1=600kg,行走齿轮34分度圆直径d3=112mm,支座开始运动时加速度a=0.005m/s2,驱动齿轮31和传动齿轮20传动减速比i=1.15,滑动摩擦系数μ1=0.15,滚动摩擦系数μ2=0.05,总扭矩传递效率η=0.95,手轮的直径d2=200mm。当支座与轨道产生滑动摩擦力时,行走齿轮34运动时所需的最大扭矩当支座与轨道产生滚动摩擦力时,行走齿轮34运动时所需的最大扭矩转换后显著减小了驱动扭矩。当支座与轨道产生滚动
摩擦力时,手轮驱动力参考gb/t 12238
‑
2008中手轮操作力规范,手轮操作力不能超过350n,所以计算结果是可行的。
44.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1