一种全自动喷漆机器人的制作方法
1.本新型涉及建筑装饰机器人控制技术领域,特指一种能实现自动喷涂、喷涂效率高质量好、有利环境保护的全自动喷漆机器人。
背景技术:
2.在建筑装饰行业中,装饰面层的油漆和涂料喷涂是必不可少的工艺步骤,但由于喷涂的油漆和涂料对人体有害,并且人工喷涂效率低,精度差,因此,
3.越来越多的无人喷涂机器人在装饰喷涂领域中得到了应用,现有的喷涂机器人还存在一些不足之处:其一,现有喷涂机器人大都采用将油漆或涂料和空气雾化,这种方式需要在涂料中添加稀释剂,雾化时voc排放大,给环境造成污染;其二,现有喷涂机器人的操控三维位置精度不够高,导致喷涂部位不够均匀。因此,如何克服现有缺陷,设计一种采用高压无气喷涂结构,实现自动喷涂、喷涂效率高质量好、有利环境保护的全自动喷漆机器人成为需要解决的技术问题。
技术实现要素:
4.本新型的目的就是针对上述情况的不足之处而提出的一种能实现自动喷涂、喷涂效率高质量好、有利环境保护的全自动喷漆机器人。
5.为达到上述目的,本新型的技术方案为:一种全自动喷漆机器人,由机器人本体和遥控器组成,机器人本体包括有动力装置、高压喷涂装置、旋转升降手臂喷枪:
6.动力装置主要包括车轮、驱动电机、电源和车体,在车体上安装有所述的高压喷涂装置;
7.高压喷涂装置包括有:油漆容器、高压泵、减压阀、蓄压过滤器、输漆管道、控制器,高压泵将外部空气通过柱塞往复运动压缩后经过减压阀的调节后进入油漆容器,油漆容器内被加压的油漆经过蓄压过滤器的过滤后从输漆管道输出;
8.旋转升降手臂喷枪包括有:液压升降机、高压软管、水平旋转装置、竖直旋转装置、喷枪,高压软管的一端连接输漆管道的输出端,高压软管的另一端与喷枪连接,液压升降机的顶部连接水平旋转装置,水平旋转装置上连接竖直旋转装置,喷枪连接在竖直旋转装置上。
9.所述蓄压过滤器包括有筒体、过滤网、网架、放泄阀、出漆阀,油漆容器内被加压的油漆进入筒体后经过网架上的过滤网过滤后,通过放泄阀将压力调节稳定后,再由出漆阀输出。
10.所述控制器包括有高压喷涂控制电路、位移控制电路和无线通信电路。
11.所述遥控器与所述控制器通过无线通信电路无线连通,在所述遥控器上包括有齿轮操作杆、升降机操作杆、电源开关、喷涂开关、喷枪手臂操作杆以及信号收发器。
12.所述机器人本体上设有用来设置喷涂程序的可编程控制器。
13.所述机器人本体上设有电子压力显示屏。
14.所述机器人本体上设有压力旋转按钮。
15.采用上述结构后,本新型通过高压无气喷涂,遥控控制可以实现以下效果:
16.1)高压无气喷涂效率将会比空气喷涂高三倍,比刷涂高10倍,能获得较厚的涂膜,减少喷涂次数,提高喷涂效率;喷涂质量好,涂层平整、光华、致密、无刷痕、滚痕和颗粒;无气喷涂不采用空气雾化,漆雾飞溅少,涂料中不需要加稀释剂或只加极少量稀释剂,大大减少了voc的排放,有利于环境的保护。
17.2)升降机和旋转装置的应用可实现机械高空作业,可减少脚手架的搭拆,降低工人高空作业和风险,提升了施工效率。
18.3)通过遥控装置控制机械的运作,降低了直接接触的污染危害,实现自动机械化操作。
19.4)高压无气喷涂能使涂料颗粒深入墙体空隙,使漆膜和墙面形成机械咬合,增强涂料附着力,延长使用寿命。
20.5)无气喷涂涂层均匀,相对节省涂料20-30%。
附图说明
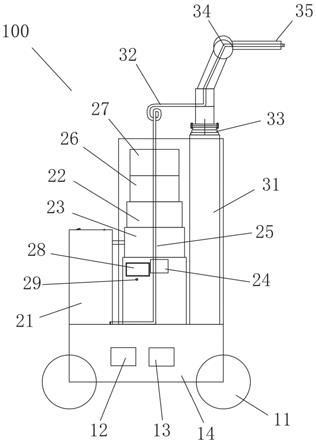
21.图1是本新型的机器人本体的结构示意图;
22.图2是本新型的遥控器的结构示意图;
23.图3是本新型的高压喷涂装置原理示意图。
具体实施方式
24.下面结合附图1-3本新型的具体实施方式做进一步详细说明。
25.如图1-3所示,本新型的技术方案为:一种全自动喷漆机器人,由机器人本体100和遥控器200组成,机器人本体100包括有动力装置10、高压喷涂装置20、旋转升降手臂喷枪30:
26.动力装置10主要包括车轮11、驱动电机12、电源13和车体14,在车体上安装有所述的高压喷涂装置20;
27.高压喷涂装置20包括有:油漆容器21、高压泵22、减压阀23、蓄压过滤器24、输漆管道25、控制器26,高压泵22将外部空气通过柱塞往复运动压缩后经过减压阀23的调节后进入油漆容器21,油漆容器21内被加压的油漆经过蓄压过滤器24的过滤后从输漆管道25输出;
28.旋转升降手臂喷枪30包括有:液压升降机31、高压软管32、水平旋转装置33、竖直旋转装置34、喷枪35,高压软管32的一端连接输漆管道25的输出端,高压软管32的另一端与喷枪35连接,液压升降机31的顶部连接水平旋转装置33,水平旋转装置33上连接竖直旋转装置34,喷枪35连接在竖直旋转装置34上。
29.所述蓄压过滤器24包括有筒体241、过滤网242、网架243、放泄阀244、出漆阀245,油漆容器21内被加压的油漆进入筒体241后经过网架243上的过滤网242过滤后,通过放泄阀244将压力调节稳定后,再由出漆阀245输出。
30.所述控制器26包括有高压喷涂控制电路、位移控制电路和无线通信电路。
31.所述遥控器200与所述控制器26通过无线通信电路无线连通,在所述遥控器200上
包括有齿轮操作杆201、升降机操作杆202、电源开关203、喷涂开关204、喷枪手臂操作杆205以及信号收发器206。
32.所述机器人本体100上设有用来设置喷涂程序的可编程控制器27。
33.所述机器人本体100上设有电子压力显示屏28。
34.所述机器人本体上100设有压力旋转按钮29,具备手动安全泄压功能。
35.使用时,通过遥控器200启动高压泵22将涂料施加高压,经过图3所示的高压喷涂装置工作流程,使涂料离开喷枪35的瞬间,以高达100m/s的速度与空气发生激烈的高速冲撞,使涂料破碎成微粒。涂料微粒的速度未衰减前,继续向前不断与空气多次冲撞,涂料微粒不断被粉碎,从而实现涂料的雾化,并粘附在物体的表面。通过液压升降机31、水平旋转装置33、和竖直旋转装置34的控制可实现高空、角落等的连续作业。
36.由此可知,本新型具有能实现自动喷涂、喷涂效率高质量好、有利环境保护的特点。
37.当然,本实用新型还可有其他多种实施方式,在不背离本实用新型精神及实质的情况下,熟悉本领域的技术人员当可根据实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于实用新型所附的权利要求的保护范围。
技术特征:
1.一种全自动喷漆机器人,由机器人本体和遥控器组成,其特征在于:机器人本体包括有动力装置、高压喷涂装置、旋转升降手臂喷枪:动力装置主要包括车轮、驱动电机、电源和车体,在车体上安装有所述的高压喷涂装置;高压喷涂装置包括有:油漆容器、高压泵、减压阀、蓄压过滤器、输漆管道、控制器,高压泵将外部空气通过柱塞往复运动压缩后经过减压阀的调节后进入油漆容器,油漆容器内被加压的油漆经过蓄压过滤器的过滤后从输漆管道输出;旋转升降手臂喷枪包括有:液压升降机、高压软管、水平旋转装置、竖直旋转装置、喷枪,高压软管的一端连接输漆管道的输出端,高压软管的另一端与喷枪连接,液压升降机的顶部连接水平旋转装置,水平旋转装置上连接竖直旋转装置,喷枪连接在竖直旋转装置上。2.根据权利要求1所述的一种全自动喷漆机器人,其特征在于:所述蓄压过滤器包括有筒体、过滤网、网架、放泄阀、出漆阀,油漆容器内被加压的油漆进入筒体后经过网架上的过滤网过滤后,通过放泄阀将压力调节稳定后,再由出漆阀输出。3.根据权利要求2所述的一种全自动喷漆机器人,其特征在于:所述控制器包括有高压喷涂控制电路、位移控制电路和无线通信电路。4.根据权利要求3所述的一种全自动喷漆机器人,其特征在于:所述遥控器与所述控制器通过无线通信电路无线连通,在所述遥控器上包括有齿轮操作杆、升降机操作杆、电源开关、喷涂开关、喷枪手臂操作杆以及信号收发器。5.根据权利要求4所述的一种全自动喷漆机器人,其特征在于:所述机器人本体上设有用来设置喷涂程序的可编程控制器。6.根据权利要求5所述的一种全自动喷漆机器人,其特征在于:所述机器人本体上设有电子压力显示屏。7.根据权利要求6所述的一种全自动喷漆机器人,其特征在于:所述机器人本体上设有压力旋转按钮。
技术总结
本新型涉及一种全自动喷漆机器人。它由机器人本体和遥控器组成,机器人本体包括有动力装置、高压喷涂装置、旋转升降手臂喷枪,高压喷涂装置包括有:油漆容器、高压泵、减压阀、蓄压过滤器、输漆管道、控制器,高压泵将外部空气通过柱塞往复运动压缩后经过减压阀的调节后进入油漆容器,油漆容器内被加压的油漆经过蓄压过滤器的过滤后从输漆管道输出;采用上述结构后,本新型采用高压无气喷涂,漆雾飞溅少,涂料中不需要加稀释剂或只加极少量稀释剂,大大减少了VOC的排放,有利于环境的保护。有利于环境的保护。有利于环境的保护。
技术研发人员:黄斌 周再忠 冯晓燕 王之杰 黄民 孔卿 朱卫国
受保护的技术使用者:深圳时代装饰股份有限公司
技术研发日:2021.06.25
技术公布日:2022/2/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1