一种便于移动的脚手架的制作方法
1.本实用新型涉及脚手架技术领域,尤其涉及一种便于移动的脚手架。
背景技术:
2.脚手架是为了保证各施工过程顺利进行而搭设的工作平台,按搭设的位置分为外脚手架、里脚手架,按材料不同可分为木脚手架、竹脚手架、钢管脚手架。
3.通常在室内施工时需要用到一种双层钢管脚手架,这类脚手架包括四个立杆、多个横杆和跳板,跳板通过挂钩固定在横杆上。但是这类脚手架一般都比较重,通常施工工地的地面都不平整,而脚手架底端的万向轮又比较小,当需要对脚手架进行移动时,轮子经常会被地面碎石卡住,移动起来非常费力。并且这类脚手架的跳板四周没有保护结构,当移动脚手架时,就必须将跳板上放置的工具以及设备全拿下来后,才能移动,否则脚手架移动过程中出现颠簸,跳板表面的工具就会滑落,因此本实用新型提出一种便于移动的脚手架。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种便于移动的脚手架。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种便于移动的脚手架,包括底板,所述底板上表面两侧分别固定有两个左立杆和两个右立杆,两个所述左立杆之间和两个右立杆之间均有两个横杆,所述底板上方靠近横杆处设有支撑结构,所述支撑结构包括跳板,且跳板上表面设有围板结构,所述底板下表面一侧设有两个导向轮,所述底板下表面远离导向轮一侧设有助力结构,任一所述左立杆和任一右立杆侧壁固定有竖梯。
6.进一步的,所述左立杆与对应右立杆之间共同固定连接有交叉支撑杆,对左立杆和右立杆形成加强支撑作用。
7.进一步的,所述跳板上表面的四个侧边均固定有两个固定杆,所述围板结构包括两个短围板和两个长围板,两个所述短围板和两个长围板靠近固定杆一侧均固定有两个套管,所述套管套设于对应固定杆表面,所述套管侧壁设有锁紧螺栓,从而可以通过将短围板和长围板上的套管套在对应固定杆上,并通过锁紧螺栓进行固定,由此将跳板给包围住。
8.进一步的,所述跳板两侧均固定有两个挂钩,两个所述挂钩与对应横杆卡合,便于将跳板固定在同一平面的两个横杆之间。
9.进一步的,所述助力结构包括两个支撑板和双轴电机,且两个支撑板和双轴电机均与底板下表面固定连接,所述双轴电机两端固定有两个转轴,两个所述转轴分别穿过两个支撑板固定连接有两个助力轮,且两个转轴与支撑板转动连接,便于通过双轴电机带动助力轮转动,使得工人推动该脚手架移动时,更加省力。
10.进一步的,所述底板下表面靠近助力结构处固定有机箱,且机箱内部设有蓄电池和控制器,蓄电池可以为双轴电机提供电能。
11.进一步的,所述底板上表面靠近导向轮一侧固定有把手,所述把手顶端设有控制
按钮,通过把手可以拉动或推动该脚手架,控制按钮与双轴电机电性连接,从而可以控制双轴电机的正反转。
12.本实用新型的有益效果:
13.1、本实用新型在使用时,通过设置底板、两个左立杆、两个右立杆、横杆、支撑结构和围板结构,从而当支撑结构的跳板通过挂钩固定在横杆上之后,可以将围板结构的短围板和长围板通过套管套接在跳板四周的固定杆上,从而将跳板包围起来,当对该脚手架进行移动时,就不需要将放置在跳板上的工具与设备拿下来再对脚手架进行移动,围板结构可以防止移动过程中跳板上的工具从跳板表面滑落,使得该脚手架移动起来更加方便。
14.2、本实用新型在使用时,通过设置底板、导向轮、助力结构、把手和控制按钮,当对该脚手架进行移动时,可以通过控制按钮控制助力结构的双轴电机驱动两个助力轮转动,进而辅助该脚手架进行移动,工人在拉动或推动该脚手架时更加省力。
附图说明
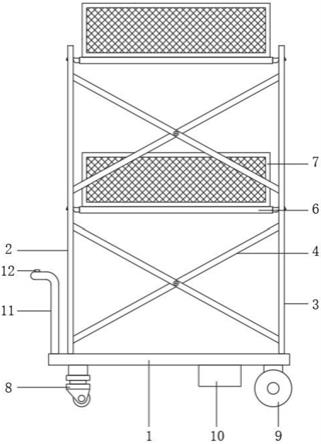
15.图1为本实用新型的主视图;
16.图2为本实用新型的支撑结构与围板结构立体图;
17.图3为本实用新型的侧视图。
18.图例说明:
19.1、底板;2、左立杆;3、右立杆;4、交叉支撑杆;5、横杆;6、支撑结构;61、跳板;62、挂钩;63、固定杆;7、围板结构;71、短围板;72、长围板;73、套管;74、锁紧螺栓;8、导向轮;9、助力结构;91、支撑板;92、双轴电机;93、转轴;94、助力轮;10、机箱;11、把手;12、控制按钮;13、竖梯。
具体实施方式
20.如图1和图3所示,涉及一种便于移动的脚手架,包括底板1,底板1上表面两侧分别固定有两个左立杆2和两个右立杆3,两个左立杆2之间和两个右立杆3之间均有两个横杆5,底板1上方靠近横杆5处设有支撑结构6,支撑结构6包括跳板61,且跳板61上表面设有围板结构7,底板1下表面一侧设有两个导向轮8,底板1下表面远离导向轮8一侧设有助力结构9,任一左立杆2和任一右立杆3侧壁固定有竖梯13。左立杆2与对应右立杆3之间共同固定连接有交叉支撑杆4。助力结构9包括两个支撑板91和双轴电机92,且两个支撑板91和双轴电机92均与底板1下表面固定连接,双轴电机92两端固定有两个转轴93,两个转轴93分别穿过两个支撑板91固定连接有两个助力轮94,且两个转轴93与支撑板91转动连接。底板1下表面靠近助力结构9处固定有机箱10,且机箱10内部设有蓄电池和控制器。底板1上表面靠近导向轮8一侧固定有把手11,把手11顶端设有控制按钮12。
21.如图2和图3所示,跳板61上表面的四个侧边均固定有两个固定杆63,围板结构7包括两个短围板71和两个长围板72,两个短围板71和两个长围板72靠近固定杆63一侧均固定有两个套管73,套管73套设于对应固定杆63表面,套管73侧壁设有锁紧螺栓74。跳板61两侧均固定有两个挂钩62,两个挂钩62与对应横杆5卡合。
22.使用时:将跳板61通过两侧的挂钩62卡合在两侧对应的横杆5上,接着将两个短围板71和两个长围板72一侧的套管73套在跳板61表面对应的固定杆63上,并拧动锁紧螺栓74
进行固定,当需要对该脚手架进行移动时,可以通过把手11推动或拉动该脚手架,拉动或推动的同时,按下控制按钮12控制双轴电机92正转或反转,使得双轴电机92带动两个助力轮94转动,实现辅助移动的作用。
23.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种便于移动的脚手架,其特征在于:包括底板(1),所述底板(1)上表面两侧分别固定有两个左立杆(2)和两个右立杆(3),两个所述左立杆(2)之间和两个右立杆(3)之间均有两个横杆(5),所述底板(1)上方靠近横杆(5)处设有支撑结构(6),所述支撑结构(6)包括跳板(61),且跳板(61)上表面设有围板结构(7),所述底板(1)下表面一侧设有两个导向轮(8),所述底板(1)下表面远离导向轮(8)一侧设有助力结构(9),任一所述左立杆(2)和任一右立杆(3)侧壁固定有竖梯(13)。2.根据权利要求1所述的一种便于移动的脚手架,其特征在于:所述左立杆(2)与对应右立杆(3)之间共同固定连接有交叉支撑杆(4)。3.根据权利要求1所述的一种便于移动的脚手架,其特征在于:所述跳板(61)上表面的四个侧边均固定有两个固定杆(63),所述围板结构(7)包括两个短围板(71)和两个长围板(72),两个所述短围板(71)和两个长围板(72)靠近固定杆(63)一侧均固定有两个套管(73),所述套管(73)套设于对应固定杆(63)表面,所述套管(73)侧壁设有锁紧螺栓(74)。4.根据权利要求1所述的一种便于移动的脚手架,其特征在于:所述跳板(61)两侧均固定有两个挂钩(62),两个所述挂钩(62)与对应横杆(5)卡合。5.根据权利要求1所述的一种便于移动的脚手架,其特征在于:所述助力结构(9)包括两个支撑板(91)和双轴电机(92),且两个支撑板(91)和双轴电机(92)均与底板(1)下表面固定连接,所述双轴电机(92)两端固定有两个转轴(93),两个所述转轴(93)分别穿过两个支撑板(91)固定连接有两个助力轮(94),且两个转轴(93)与支撑板(91)转动连接。6.根据权利要求1所述的一种便于移动的脚手架,其特征在于:所述底板(1)下表面靠近助力结构(9)处固定有机箱(10),且机箱(10)内部设有蓄电池和控制器。7.根据权利要求1所述的一种便于移动的脚手架,其特征在于:所述底板(1)上表面靠近导向轮(8)一侧固定有把手(11),所述把手(11)顶端设有控制按钮(12)。
技术总结
本实用新型公开了一种便于移动的脚手架,包括底板,所述底板上表面两侧分别固定有两个左立杆和两个右立杆,两个所述左立杆之间和两个右立杆之间均有两个横杆,所述底板上方靠近横杆处设有支撑结构,所述支撑结构包括跳板。本实用新型中,设置有底板、两个左立杆、两个右立杆、横杆、支撑结构和围板结构,从而当支撑结构的跳板通过挂钩固定在横杆上之后,可以将围板结构的短围板和长围板通过套管套接在跳板四周的固定杆上,从而将跳板包围起来,当对该脚手架进行移动时,就不需要将放置在跳板上的工具与设备拿下来再对脚手架进行移动,围板结构可以防止移动过程中跳板上的工具从跳板表面滑落,使得该脚手架移动起来更加方便。使得该脚手架移动起来更加方便。使得该脚手架移动起来更加方便。
技术研发人员:赵钱
受保护的技术使用者:天津信达振业机械设备有限公司
技术研发日:2021.12.09
技术公布日:2022/4/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1