一种可进行喷浆操作的砌墙机器人
1.本实用新型涉及建筑业砌砖机械设备领域,特别涉及一种可进行喷浆操作的砌墙机器人。
背景技术:
2.砖砖是建筑业中面大量广的一种砌体结构,常见的为红砖墙,传统的砌墙过程大多是工人采用铺浆法或坐浆法将砖块一块块放置,混凝土一点点涂抹,这些传统的砌墙方法工序多,占用时间与人力多,砌筑效率受工人技巧影响大,施工速度慢,已经不再适应时代的发展。
3.近年来,砌墙机器人已成为建筑业界和机器人学界广泛研究的热点和焦点,但目前常见的砌墙机器人在结构上往往占地大移动不便,或需要采用特殊粘合剂进行垒砌。本实用新型提出的砌墙机器人具有全向移动能力,砌砖时可使用常见的混凝土,具有串联机械臂与并联末端执行器的混联堆砌装置可完成砖块放置操作,可适用各种复杂环境下的砌墙操作。
技术实现要素:
4.本实用新型的目的在于提供一种可进行喷浆操作的砌墙机器人,可利用全向底盘进行移动到达指定位置,利用升降装置调整上平台位置,喷浆涂抹装置接收混凝土并完成铺浆与砖块侧面涂浆操作,砖块识别传送带将砖块运输到指定位置,通过混联堆砌装置完成砖块放置操作。
5.本实用新型采用如下的技术方案实现:
6.一种可进行喷浆操作的砌墙机器人,包括全向底盘、升降装置、上平台、喷浆涂抹装置、混联堆砌装置、砖块识别传送带,所述全向底盘与上平台通过升降装置上下相连,砖块识别传送带位于上平台上方左侧,混联堆砌装置位于上平台前侧上导轨,喷浆涂抹装置位于上平台上方右侧。
7.所述喷浆涂抹装置包括混凝土泵、混凝土导管、导管保护壳、导管收纳箱、前侧滑动基台、喷抹装置。混凝土泵位于机器人上平台上方右侧,混凝土泵从上方注入口内流入的混凝土按控制系统处理后注入混凝土导管,混凝土导管自混凝土泵右侧导出沿上平台侧面进入位于上平台右侧的导管收纳箱,导管收纳箱内导管缠绕收集并从收纳箱下侧伸出与前侧滑动基台上的喷浆装置相连,所述导管保护壳位于机器人上平台右侧。
8.所述喷抹装置包括下滑动基座、伸缩刀管、刮浆刀、喷浆管、喷浆底座组成,滑动基座底部位于上平台前侧下导轨,可沿导轨左右移动,下滑动基座顶部与喷浆底座的底部相连,喷浆底座可旋转,混凝土导管与喷浆底座右侧相连,喷浆管与伸缩刀管位于喷浆底座顶部并能旋转,刮浆刀尾端为球副与伸缩刀管相连。
9.所述全向底盘包括承载底盘、伺服电机与麦克纳姆轮,伺服电机与麦克纳姆轮相连,两者位于承载底盘下方。
10.所述升降装置包括升降底板、升降顶板、伺服移动滑块、连接杆与连接柱,所述升降底板底部与全向底盘顶部相连,升降顶板顶部与上平台底部相连,连接杆与连接柱组成可调节高度的两相同杆组位于顶板与底板之间,伺服移动滑块位于升降底板的中心滑轨上,与杆组底部滑动连接柱相连,伺服移动滑块向前移动时升降装置实现上升功能,向后移动时实现下降功能,上平台与全向底盘闭合时可隐藏保护升降装置。
11.所述上平台包括承载上平台、前摄像头与控制柜,所述承载上平台前侧有上导轨与下导轨,前摄像头位于上导轨左侧,控制柜位于承载上平台右前侧,控制柜内部装有机器人控制系统接收外部摄像头提供的环境信息与工作命令,发出机器人的控制命令,控制柜柜门位于砌墙机器人右侧。
12.所述砖块识别传送带包括传送带、识别摄像头与传感挡板,传感挡板位于传送带前端,在砖块与挡板接触时阻挡砖块并发送砖块接触挡板信息到控制柜,识别摄像头位于传感挡板后侧,可观察砖块位置信息,传送带向前运动运输自后方放置的砖块。
13.所述混联堆砌装置包括串联机械臂、并联末端执行器与堆砌底座,所述堆砌底座位于上平台前侧上导轨并可沿导轨滑动,串联机械臂位于堆砌底座上方,串联机械臂具有5个自由度;
14.所述并联末端执行器包括旋转平台、抓手平台、手爪、第一驱动支链、第二驱动支链、第三驱动支链与中间约束支链组成,所述第一驱动支链为sps型支链,包括上复合球铰s,伺服驱动单元p,下复合球铰s,两复合球铰位置相同,第一、第二、第三驱动支链结构相同皆为sps型支链,上复合球铰s与旋转平台的凸台铰接,下复合球铰s与抓手平台的凸台铰接,两平台与第一、第二、第三驱动支链铰接的凸台各构成一个等边三角形,两等边三角形全等,中间约束支链由两固定杆组成的球铰链,两固定杆底部中心分别位于旋转平台、抓手平台上凸台构成的等边三角形的中心,所述手爪位于抓手平台下方,可沿平台上滑轨左右滑动。
15.本实用新型与现有技术相比具有如下优点:(1)升降平台可灵活调整上平台高度,上平台与全向平台闭合后收纳升降装置,起到隐藏保护防尘的作用;(2)喷浆涂抹装置可以进行传统的铺浆法操作,也可以在砖块侧面进行混凝土喷涂操作;(3)安装了伺服电机与麦克纳姆轮的全向底盘,可以进行全向移动;(4)混联堆砌装置使用了并联末端执行器与串联机械臂,串联机械臂控制简单、运动空间大、反应灵敏,并联末端执行器无累积误差、精度高、刚度高、动态响应好;(5)上平台前侧加工有导轨,提高了喷浆装置与堆砌装置的工作空间;(6)上平台前侧与砖块识别传送带上方安装有摄像头,可以识别砖块位置与工作环境信息。
附图说明
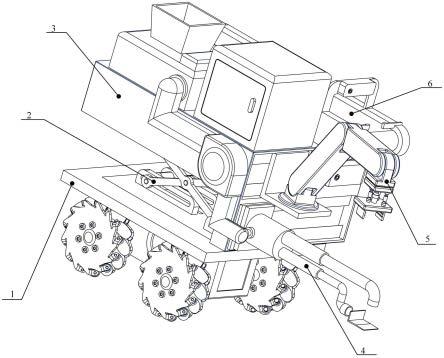
16.图1是本实用新型的一种可进行喷浆操作的砌墙机器人的整体结构示意图;
17.图2是本实用新型的一种可进行喷浆操作的砌墙机器人全向底盘的结构示意图;
18.图3是本实用新型的一种可进行喷浆操作的砌墙机器人升降装置的结构示意图;
19.图4是本实用新型的一种可进行喷浆操作的砌墙机器人上平台的结构示意图;
20.图5是本实用新型的一种可进行喷浆操作的砌墙机器人喷浆涂抹装置的结构示意图;
21.图6是本实用新型的一种可进行喷浆操作的砌墙机器人混联堆砌装置的结构简图;
22.图7是本实用新型的一种可进行喷浆操作的砌墙机器人砖块识别传送带的结构简图;
23.图8是本实用新型的一种可进行喷浆操作的砌墙机器人喷抹装置的结构简图
24.图9是本实用新型的一种可进行喷浆操作的砌墙机器人并联末端执行器的结构简图;
25.其中:
26.图1中:1.全向底盘;2.升降装置;3.上平台;4.喷浆涂抹装置;5.混联堆砌装置;6.砖块识别传送带;
27.图2中:101.承载底盘;102.伺服电机;103.麦克纳姆轮;
28.图3中:201.升降底板;202.升降顶板;203.伺服移动滑块;204.连接杆;205.连接柱;
29.图4中:301.承载上平台;302.前摄像头;303.控制柜;
30.图5中:401.混凝土泵;402.混凝土导管;403.导管保护壳;404.导管收纳箱;405.前侧滑动基台;406.喷抹装置;
31.图6中:501.串联机械臂;502.并联末端执行器;503.堆砌底座;
32.图7中:601.传送带;602.识别摄像头;603.传感挡板;
33.图8中:701.下滑动基台;702.伸缩刀管;703.刮浆刀;704.喷浆管;705.喷浆底座;
34.图9中:801.旋转平台;802.抓手平台;803.手爪;804.第一驱动支链;805.第二驱动支链;806.第三驱动支链;807.中间约束支链;
具体实施方式
35.为进一步了解本实用新型提供的一种可进行喷浆操作的砌墙机器人,下面结合附图和详细实施例对本实用新型进行具体阐述,本实用新型的内容不局限于实施例。
36.在本实用新型的描述中,需要说明,术语“上侧”、“下侧”、“上方”、“下方”、“向内”等指示方位或位置关系为基于附图所示方位或位置关系,仅是为了便于描述本实用新型和简化描述,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解成指示或暗示重要性。
37.如图1,砌墙机器人包括全向底盘1、升降装置2、上平台3、喷浆涂抹装置4、混联堆砌装置5、砖块识别传送带6,所述全向底盘1与上平台3通过升降装置2上下相连,砖块识别传送带6位于上平台3上方左侧,混联堆砌装置5位于上平台3前侧上导轨,喷浆涂抹装置5位于上平台3上方右侧。
38.如图2,砌墙机器人全向底盘1包括承载底盘101、伺服电机102与麦克纳姆轮103,伺服电机102与麦克纳姆轮103相连,两者位于承载底盘101下方。
39.如图3,砌墙机器人升降装置2包括升降底板201、升降顶板202、伺服移动滑块203、连接杆204与连接柱205,所述升降底板201底部与全向底盘1顶部相连,升降顶板202顶部与上平台3底部相连,连接杆204与连接柱205组成可调节高度的两相同杆组位于顶板与底板之间,伺服移动滑块203位于升降底板201的中心滑轨上,与杆组底部滑动连接柱205相连,
伺服移动滑块203向前移动时升降装置实现上升功能,向后移动时实现下降功能,上平台3与全向底盘1闭合时可隐藏保护升降装置。
40.如图4,砌墙机器人上平台3包括承载上平台301、前摄像头302与控制柜303,所述承载上平台301前侧有上导轨与下导轨,前摄像头302位于上导轨左侧,控制柜303位于承载上平台3右前侧,控制柜303内部装有机器人控制系统接收外部摄像头提供的环境信息与工作命令,发出机器人的控制命令,控制柜303位于砌墙机器人右侧。
41.如图5与图8,砌墙机器人喷浆涂抹装置4包括混凝土泵401、混凝土导管402、导管保护壳403、导管收纳箱404、前侧滑动基台405、喷抹装置406。混凝土泵位401于机器人上平台3上方右侧,混凝土泵401将从上方注入口内流入的混凝土按控制系统处理后注入混凝土导管402,混凝土导管402自混凝土泵401右侧导出沿上平台3侧面进入位于上平台3右侧的导管收纳箱404,导管收纳箱404内导管缠绕收集并从收纳箱下侧伸出与前侧滑动基台405上的喷浆装置406相连,所述导管保护壳位于机器人上平台右侧。
42.喷抹装置406包括下滑动基座701、伸缩刀管702、刮浆刀703、喷浆管704、喷浆底座705组成,下滑动基座701底部位于上平台3前侧下导轨,可沿导轨左右移动,下滑动基座701顶部与喷浆底座705的底部相连,喷浆底座705可旋转,混凝土导管402与喷浆底座705右侧相连,喷浆管704与伸缩刀管702位于喷浆底座705顶部并能旋转,刮浆刀703尾端为球副与伸缩刀管702相连。
43.如图6与图9,砌墙机器人混联堆砌装置5包括串联机械臂501、并联末端执行器502与堆砌底座503,所述堆砌底座503位于上平台3前侧上导轨并可沿导轨滑动,串联机械臂501位于堆砌底座503上方,串联机械臂501具有5个自由度;
44.所述并联末端执行器502包括旋转平台801、抓手平台802、手爪803、第一驱动支链804、第二驱动支链805、第三驱动支链806与中间约束支链807组成,所述第一驱动支链804为sps型支链,包括上复合球铰s,伺服驱动单元p,下复合球铰s,两复合球铰位置相同,第一、第二、第三驱动支链结构相同皆为sps型支链,上复合球铰s与旋转平台801的凸台铰接,下复合球铰s与抓手平台802的凸台铰接,两平台与第一、第二、第三驱动支链铰接的凸台各构成一个等边三角形,两等边三角形全等,中间约束支链807由两固定杆组成的球铰链,两固定杆底部中心分别位于旋转平台801、抓手平台802上凸台构成的等边三角形的中心,所述手爪803位于抓手平台802下方,可沿平台上滑轨左右滑动。
45.如图7,所述砖块识别传送带6包括传送带601、识别摄像头602与传感挡板603,传感挡板603位于传送带601前端,在砖块与挡板接触时阻挡砖块并发送砖块接触挡板信息到控制柜303,识别摄像头602位于传感挡板603后侧,可观察砖块位置信息,传送带601向前运动运输自后方放置的砖块。
46.实施例:
47.在本实施方案中,机器人开机后,位于上平台3上的控制柜303接收到砌墙指令,根据前摄像头302获取的外界信息,发出命令到全向底盘1处的伺服电机102中,电机驱动麦克纳姆轮103进行全向移动到达指定地点。到达指定地点后前摄像头302观察环境获取位置信息并输入控制柜303中,如高度不满足工作需求则发送指令到达升降底板201上的伺服移动滑块203,滑块根据指令通过在滑轨上前后移动使连接杆204与连接柱205组成的杆组变形调节整个升降装置2的高度,在位置合适后升降顶板202静止开始下一步操作。
48.调整好高度后,喷浆涂抹装置4在工作面上进行铺浆操作,混凝土泵401将注入其中的混凝土加压后注入位于导管保护壳403下的混凝土导管402中,导管收纳箱404收纳一部分导管,混凝土流至喷抹装置406上的喷浆管704内,接受信号后开始喷涂,喷浆底座705旋转调整装置位置,位于上平台3前侧下导轨的下滑动基台701调整混凝土左右落点,喷浆管704前后伸缩调整混凝土前后落点,喷涂完成后下滑动基台701与伸缩刀管702调整刮浆刀703的位置处理混凝土厚度。
49.在注入混凝土的同时将砖块放置在砖块识别传送带6上,传送带601开始转动,当砖块碰触到传感挡板603后传送带停止运动,这时控制柜303发送命令到混联堆砌装置5,位于上平台3前侧上导轨的堆砌底座503移动到合适位置后,串联机械臂501运动使并联末端执行器502到达砖块识别传送带6上方,根据识别摄像头602获取的砖块尺寸信息与位置信息,并联末端执行器502通过旋转平台801、第一驱动支链804、第二驱动支链805与第三驱动支链806调整抓手平台802的位置,以此使手爪803可以将砖块夹取。
50.夹取砖块后,串联机械臂501抬起砖块离开砖块识别传送带6,根据控制柜303提供的信息串联机械臂501与堆砌底座503使并联末端执行器502与被夹取的砖块到达处理好的混凝土上方,如堆砌的砖墙厚度方向上是单块砖,并联末端执行器502会使砖块移动到与混凝土接触的地方,并通过各支链调整砖块位置,如堆砌的砖墙厚度是多块砖,并联末端执行器502会在砖块与混凝土之间距离到达控制柜303设计的数据后松开砖块,再用手爪803下侧与砖块接触通过混联堆砌装置5调整砖块位置,喷浆涂抹装置4在砖块侧面喷涂混凝土,并用刮浆刀703调整砖块位置。在放下砖块后,混联堆砌装置5移动到砖块识别传送带6上准备进行下一块砖的堆砌。
51.本实用新型专利所述的一种可进行喷浆操作的砌墙机器人的实施方式不局限于以上所描述的具体实施形式,根据本实用新型公开的内容,所属技术领域的技术人员还可以采取其他的具体方式进行实施,因此,实施例不能理解为本实用新型仅可以实施的具体实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1