执行器及抹灰机器人的制作方法
本申请涉及建筑机器人,具体而言,涉及一种执行器及抹灰机器人。
背景技术:
1、抹灰机是墙面抹灰作业所用的设备,一般的抹灰机在遇到墙面左右不平的情况时的抹灰作业效果不佳,一些抹灰机设计了摆动调节结构,以使得执行端适应墙面的左右平整变化。
2、在安装空间有限的情况下,摆动调节结构的驱动机构只能偏移安装,即不安装到抹灰板后方中部位置,但现有的摆动调节结构在被驱动机构向墙面推挤时,存在较大的偏移力矩,使得执行端与墙面仍然不能很好贴合,影响抹灰作业的质量。
技术实现思路
1、本申请的目的在于提供一种执行器,其能够改善现有的执行端由于有较大偏移力矩而抹灰质量不佳的问题。
2、本申请的另外一个目的在于提供一种抹灰机器人,其包括上述执行器,其具有该执行器的全部特性。
3、本申请的实施例是这样实现的:
4、本申请的实施例提供了一种执行器,包括:
5、前端执行机构,用于执行作业;
6、后端驱动机构,所述后端驱动机构包括作业支架、直线驱动件和滑动基座,所述滑动基座可滑动地设置于所述作业支架,所述前端执行机构绕预设轴线可转动地连接于所述滑动基座;以及
7、导力机构,所述导力机构包括基部、第一导力部和第二导力部,所述第一导力部和所述第二导力部连接于所述基部,所述基部可滑动地设置于所述滑动基座,所述直线驱动件的输出端与所述第一导力部连接,所述第二导力部相对于所述第一导力部更靠近所述预设轴线。
8、前端执行机构可转动地连接在滑动基座上,所述直线驱动件工作时,所述第一导力部通过所述基部带动所述第二导力部移动,所述第二导力部推动所述滑动基座,以使得前端执行机构向着所述作业面移动且与所述作业面抵持,并且能够适应作业面的倾斜变化。其中,由于第二导力部更靠近预设轴线,直线驱动件的驱动力可以通过第二导力部传递到滑动基座,并作用到前端执行机构上,施力的位置距离预设轴线越近,直线驱动件输出端和前端执行机构间的偏移力矩就越小,能够使得整个前端执行机构都与作业面保持抵持,以保障均匀抹灰,提升抹灰质量。
9、另外,根据本申请的实施例提供的执行器,还可以具有如下附加的技术特征:
10、在本申请的可选实施例中,所述前端执行机构包括执行模组和转轴,所述转轴连接于所述执行模组,所述执行模组用于对作业面抹灰,所述转轴可转动地连接于所述滑动基座,所述预设轴线为所述转轴的转动轴线且沿竖直方向延伸。
11、通过设置单独的转轴,使得执行模组的摆动范围可以较大,能够基本适应一般墙面这类作业面的倾斜程度,将转轴竖向设置,可以实现在左右方向上使得执行模组与作业面保持较好的贴合,保障抹灰质量。
12、在本申请的可选实施例中,所述转轴连接于所述执行模组的中部。
13、由于转轴设置于执行模组的中部,加之第二导力部较为靠近转轴,在第二导力部施力时,执行模组可以较为快速地调整到位,避免一端调节到位后,另一端不能迅速与作业面贴合,提升作业效率。
14、在本申请的可选实施例中,所述滑动基座包括第一部、第二部和第三部,所述第一部套设于所述转轴且与所述转轴转动配合,所述第二部处于所述第一部和所述第三部之间,所述基部可滑动地设置于所述第三部,所述第二导力部抵持于所述第二部,所述第一导力部处于所述基部的远离所述第二部的一侧。
15、由于第一导力部处于基部的远离第二导力部的一侧,直线驱动件的安装位置可以离转轴更远,从而允许直线驱动件有更大的安装空间,以便于根据驱动的需求,选择适宜的直线驱动件。既能够通过导力机构来传导驱动力,降低偏移力矩,又能够避免因安装不便而不能选用功率足够的直线驱动件。
16、在本申请的可选实施例中,所述第一导力部、所述基部和所述第二导力部依次连接并形成z字型结构。
17、z字型结构的导力机构既可以将直线驱动件的作用力传导,又可以避免结构复杂化,并且能够使得直线驱动件的驱动力可以保持向前驱动,不需要设置额外的转向部件来引导作用力保持向前推挤前端驱动机构。
18、在本申请的可选实施例中,所述导力机构还包括直线引导块,所述直线引导块固定于所述滑动基座,所述基部包括过渡部和直线导轨,所述直线导轨沿着所述过渡部分布,所述第一导力部和所述第二导力部连接于所述过渡部,所述直线导轨可滑动地设置于所述直线引导块。
19、通过设置直线引导块并配套设置直线导轨,过渡部的运动方向可以与直线驱动件的驱动方向保持一致,从而避免第二导力部与前端执行机构之间产生额外的偏移力矩。
20、在本申请的可选实施例中,所述后端驱动机构还包括压力传感器,所述压力传感器设置于所述第二部,所述导力机构还包括弹性缓冲件,所述第二导力部通过所述弹性缓冲件抵持于所述压力传感器的检测端。
21、压力传感器可以用于监测直线驱动件最终对作业面所施加的驱动力大小,避免压力过大或过小而影响前端执行机构正常的抹灰作业。
22、在本申请的可选实施例中,所述后端驱动机构还包括限位柱,所述限位柱设置于所述作业支架前端,以限制所述前端执行机构的摆动范围。
23、在保障前端执行机构的摆动范围足够满足墙面这类作业面的情况下,通过设置限位柱,可以避免摆动范围过大而使得前端执行机构碰伤后端驱动机构。
24、在本申请的可选实施例中,所述执行器还包括旋转驱动机构,所述旋转驱动机构包括旋转驱动件和轴承,所述旋转驱动件包括主体部和伸缩杆,所述主体部铰接于所述作业支架,所述轴承的外圈固定于所述作业支架,所述伸缩杆铰接于所述轴承的内圈,所述轴承的内圈用于与机器人主体固定连接。
25、通过设置旋转驱动机构,旋转驱动件可以通过与轴承的配合,使得整个执行器能够相对于机器人主体旋转,以便于收纳执行器。
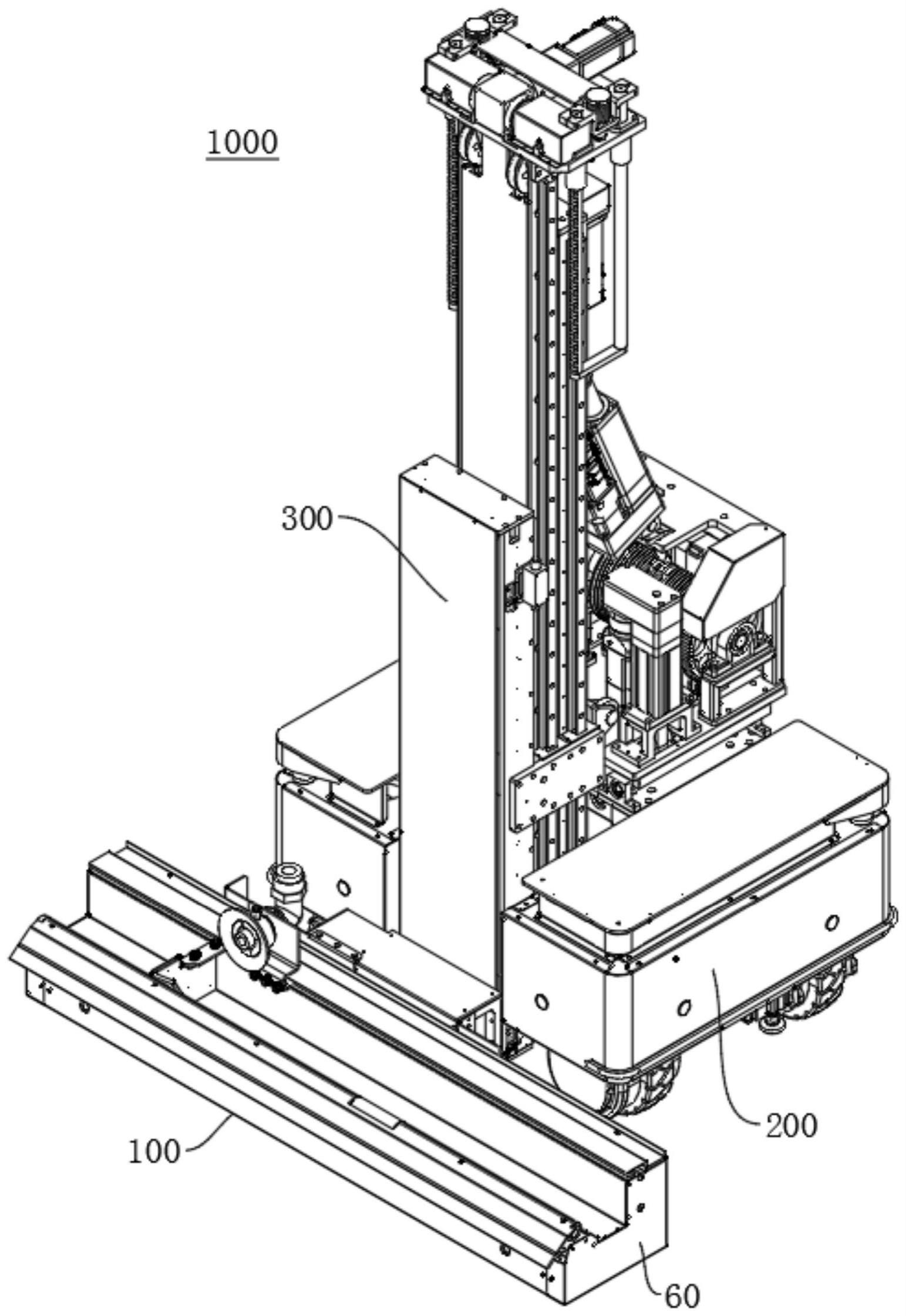
26、本申请的实施例提供了一种抹灰机器人,包括:
27、底盘;
28、升降装置,所述升降装置设置于所述底盘;以及
29、根据上述任一项所述的执行器,所述作业支架连接于所述升降装置的输出端。
30、抹灰机器人通过使用执行器,能够保障抹灰时与墙面抵接,确保抹灰质量。
技术特征:
1.一种执行器,其特征在于,包括:
2.根据权利要求1所述的执行器,其特征在于,所述前端执行机构包括执行模组和转轴,所述转轴连接于所述执行模组,所述执行模组用于对作业面抹灰,所述转轴可转动地连接于所述滑动基座,所述预设轴线为所述转轴的转动轴线且沿竖直方向延伸。
3.根据权利要求2所述的执行器,其特征在于,所述转轴连接于所述执行模组的中部。
4.根据权利要求2所述的执行器,其特征在于,所述滑动基座包括第一部、第二部和第三部,所述第一部套设于所述转轴且与所述转轴转动配合,所述第二部处于所述第一部和所述第三部之间,所述基部可滑动地设置于所述第三部,所述第二导力部抵持于所述第二部,所述第一导力部处于所述基部的远离所述第二部的一侧。
5.根据权利要求1或4所述的执行器,其特征在于,所述第一导力部、所述基部和所述第二导力部依次连接并形成z字型结构。
6.根据权利要求5所述的执行器,其特征在于,所述导力机构还包括直线引导块,所述直线引导块固定于所述滑动基座,所述基部包括过渡部和直线导轨,所述直线导轨沿着所述过渡部分布,所述第一导力部和所述第二导力部连接于所述过渡部,所述直线导轨可滑动地设置于所述直线引导块。
7.根据权利要求4所述的执行器,其特征在于,所述后端驱动机构还包括压力传感器,所述压力传感器设置于所述第二部,所述导力机构还包括弹性缓冲件,所述第二导力部通过所述弹性缓冲件抵持于所述压力传感器的检测端。
8.根据权利要求1所述的执行器,其特征在于,所述后端驱动机构还包括限位柱,所述限位柱设置于所述作业支架前端,以限制所述前端执行机构的摆动范围。
9.根据权利要求1所述的执行器,其特征在于,所述执行器还包括旋转驱动机构,所述旋转驱动机构包括旋转驱动件和轴承,所述旋转驱动件包括主体部和伸缩杆,所述主体部铰接于所述作业支架,所述轴承的外圈固定于所述作业支架,所述伸缩杆铰接于所述轴承的内圈,所述轴承的内圈用于与机器人主体固定连接。
10.一种抹灰机器人,其特征在于,包括:
技术总结
本申请提供一种执行器及抹灰机器人,涉及建筑机器人技术领域。执行器包括前端执行机构,用于执行作业;后端驱动机构,后端驱动机构包括作业支架、直线驱动件和滑动基座,滑动基座可滑动地设置于作业支架,前端执行机构绕预设轴线可转动地连接于滑动基座;以及导力机构,导力机构包括基部、第一导力部和第二导力部,第一导力部和第二导力部连接于基部,基部可滑动地设置于滑动基座,直线驱动件的输出端与第一导力部连接,第二导力部相对于第一导力部更靠近预设轴线。执行器能够在基本没有偏移力矩的状态下使得前端执行机构能够与作业面抵持并适应作业面的不平整。抹灰机器人在采用该执行器后,能够保障良好的抹灰质量。
技术研发人员:乔垒,李铁芳,潘鹏,李建明
受保护的技术使用者:广东博智林机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!