一种墙面修补装置以及修补方法与流程
1.本发明涉及乳胶漆技术领域,具体为一种墙面修补装置以及修补方法。
背景技术:
2.乳胶漆是乳胶涂料的俗称,诞生于二十世纪七十年代中下期,是以丙烯酸酯共聚乳液为代表的一大类合成树脂乳液涂料,乳胶漆是水分散性涂料,它是以合成树脂乳液为基料,填料经过研磨分散后加入各种助剂精制而成的涂料,乳胶漆具备了与传统墙面涂料不同的众多优点,如易于涂刷、干燥迅速、漆膜耐水、耐擦洗性好等,在我国,人们习惯上把合成树脂乳液为基料,以水为分散介质,加入颜料、填料(亦称体质颜料)和助剂,经一定工艺过程制成的涂料,叫做乳胶漆,也叫乳胶涂料,现有技术领域内,墙面乳胶漆特别是有色乳胶漆修补,如果乳胶漆中的颜料色浆不均匀分散时修补色浆会沉淀,涂出来颜色也不均会影响装饰表面的效果,并且由于棚顶所在位置的高度和角度问题,导致棚顶墙面的乳胶漆修复操作较为麻烦。
技术实现要素:
3.本发明的目的在于提供一种墙面修补装置以及修补方法,以至少解决现有技术的墙面乳胶漆特别是有色乳胶漆修补,如果乳胶漆中的颜料色浆不均匀分散时修补色浆会沉淀,涂出来颜色也不均会影响装饰表面的效果,并且由于棚顶所在位置的高度和角度问题,导致棚顶墙面的乳胶漆修复操作较为麻烦的问题。
4.为实现上述目的,本发明提供如下技术方案:一种墙面修补装置,包括:
5.手提箱;
6.充电舱,开设在所述手提箱的右侧底端;
7.爬墙机器人,可收纳在所述充电舱的内部;
8.涂抹机构,内嵌在所述爬墙机器人的顶部开口处;
9.控制器,放置在所述手提箱的顶端凹槽内,所述控制器分别与充电舱和涂抹机构远程网络连接;
10.颜料存储盒,设置在所述手提箱的顶端且位于控制器的后侧;
11.自动调色盘,内嵌在所述手提箱的顶端右侧,所述自动调色盘和控制器远程网络连接;
12.混合模块,内嵌在所述手提箱的顶端且位于自动调色盘的后侧,所述混合模块和控制器远程网络连接;
13.灌装模块,内嵌在所述手提箱的右侧,所述灌装模块和混合模块相连接,所述灌装模块和控制器远程网络连接。
14.优选的,所述涂抹机构包括:涂抹机构外壳、涂抹组件、电动门、存储舱、电动泵、第一电推杆、喷头管和三通阀管;涂抹机构外壳内嵌在所述爬墙机器人的顶部中心位置开口处;涂抹组件沿左右方向设置在所述涂抹机构外壳的顶端开口处;电动门设置在所述涂抹
组件的上方;存储舱内嵌在所述涂抹机构外壳的底端右侧,所述存储舱的底端眼神处手提箱的外部;电动泵设置在所述手提箱的内腔底端中心位置,所述电动泵和控制器远程网络连接,所述电动泵的进料口眼神进存储舱的内部;第一电推杆所述第一电推杆的数量为两个,两个所述第一电推杆分别设置在涂抹机构外壳的内腔中部顶端左右两侧,所述第一电推杆和控制器远程网络连接;所述喷头管的数量为两个,两个所述喷头管分别设置在左右两个第一电推杆的伸缩端;三通阀管一端螺接在所述电动泵的出口处,所述三通阀管的另外两端分别与两个喷头管相螺接。
15.优选的,所述存储舱的底端设置有阀门并可与灌装模块相连接。
16.优选的,上下两个所述第一电推杆旋转一百八十度重合设置。
17.优选的,所述涂抹机构还包括:安装座、第二电推杆、涂料辊、第一齿轮、第二齿轮、传动皮带、第一电机、第一皮带轮和第二皮带轮;所述安装座的数量为两个,两个所述安装座分别通过销轴转动连接在涂抹机构外壳的内腔左右两侧;所述第二电推杆的数量为两个,两个所述第二电推杆一端分别通过销轴转动连接在涂抹机构外壳的内腔左右两侧顶端,两个所述第二电推杆的另一端分别与左右两个安装座的外侧通过销轴转动连接,所述第二电推杆和控制器远程网络连接;所述涂料辊的数量为两个,两个所述涂料辊分别沿前后方向通过销轴转动连接在左右两个安装座的后侧顶端,所述涂料辊的轴心眼神处安装座的前侧;所述第一齿轮的数量为两个,两个所述第一齿轮分别键连接在左右两个涂料辊的轴心前端;所述第二齿轮的数量为两个,两个所述第二齿轮分别键连接在左右两个安装座的前侧底端,两个所述第二齿轮分别与左右两个第一齿轮啮合;传动皮带两端分别螺钉连接在左右两个第二齿轮的前端;第一电机设置在所述涂抹机构外壳的内腔左下方,所述第一电机和控制器远程网络连接;第一皮带轮螺钉连接在所述第一电机的输出端;第二皮带轮螺钉连接在左侧所述第二齿轮的轴心前端,所述第二皮带轮和第一皮带轮通过皮带传动连接。
18.优选的,所述涂抹组件包括:涂抹组件外壳、转动座、连接框、伸缩杆和第三电推杆;涂抹组件外壳沿左右方向设置在所述涂抹机构外壳的顶端开口处,所述涂抹组件外壳的内腔上下两侧分别与电动门和涂抹机构外壳的内侧相通所述转动座的数量为两个,两个所述转动座分别通过销轴转动连接在涂抹组件外壳内侧左右两端,左右两个所述转动座分别位于左右两个涂料辊上方对应位置处;连接框沿左右方向通过销轴转动连接在左右两个转动座的内侧底端;伸缩杆一端通过销轴转动连接在所述连接框的内侧;第三电推杆通过销轴转动连接在所述涂抹组件外壳的内腔,所述第三电推杆的伸缩端与伸缩杆的另一端通过销轴转动连接,所述第三电推杆和控制器远程网络连接;其中,左右两个所述转动座的内侧均设置有角度涂抹单元。
19.优选的,所述角度涂抹单元包括:框体、转动座、涂抹辊、连接杆和第四电推杆;框体沿前后方向设置在所述转动座的内侧顶端;转动座通过轴承转动连接在所述框体的内侧;涂抹辊沿前后方向通过销轴转动连接在所述转动座的内侧;连接杆一端螺钉连接在所述转动座的轴心;第四电推杆沿前后方向设置在所述框体的底端,所述第四电推杆的伸缩端与连接杆的另一端通过销轴转动连接,所述第四电推杆和控制器远程网络连接。
20.与现有技术相比,本发明的有益效果是:该墙面修补装置:
21.1、通过根据需要修补的墙体颜色取出颜料存储盒内部颜料罐并固定安装在自动
调色盘内,控制控制器依次启动自动调色盘和混合模块,自动调色盘内部预置程序将自身内部颜料依次转动至混合模块对应位置处并进行注入,混合模块将内部乳胶漆与对内部颜料进行混合搅拌得到适配墙面颜色乳胶漆,将存储舱与灌装模块进行对接,灌装模块将混合模块内部乳胶漆注入存储舱内进行存储:
22.2、通过第一电推杆伸长推动对应位置上的喷头管向外侧移动以使喷头管移动至于涂料辊贴合位置处,电动泵将存储舱内部乳胶漆由三通阀管注入至喷头管内并由喷头管喷涂在涂料辊外壁,第二电推杆伸长推动对应位置上安装座以与涂抹机构外壳销轴转动连接处为顶点向内侧转动,安装座驱动第一齿轮沿第二齿轮外壁移动并带动涂料辊向内侧转动至与涂抹辊外壁贴合位置处,第一电机驱动第一皮带轮转动,第二皮带轮在第一皮带轮旋转力的作用下驱动左侧第二齿轮带动传动皮带一端转动,右侧第二齿轮在传动皮带传动下同步转动,进而使左右两侧第一齿轮在第二齿轮旋转力的作用下转动,第一齿轮驱动涂料辊将其表面乳胶漆涂抹在涂抹辊外壁:
23.3、通过第三电推杆缩短带动伸缩杆向右侧移动,伸缩杆在连接框的配合下驱动转动座以与涂抹组件外壳内腔销轴转动连接处为顶点转动至竖直状态,进而使涂抹辊移动处涂抹组件外壳内腔,第四电推杆伸长缩短驱动连接杆一端前后移动,进而使连接杆驱动转动座轴心转动,以使转动座改变涂抹辊角度位置,进而调整涂抹方向,工作人员控制控制器沿墙面移动进行涂抹进而达到对墙面修补目的:
24.从而可实现现有墙面有色乳胶漆的自动配色,保证乳胶漆配色均匀与准确,以避免影响装饰表面的效果,并且可实现棚顶等操作不便位置的自动涂抹修补,操作简单,省时省力。
附图说明
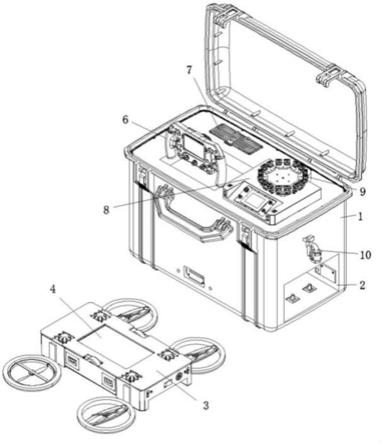
25.图1为本发明的结构示意图;
26.图2为图1的涂抹机构正面剖视图;
27.图3为图2的涂抹组件正面剖视图。
28.图中:1、手提箱,2、充电舱,3、爬墙机器人,4、涂抹机构,41、涂抹机构外壳,42、电动门,43、存储舱,44、电动泵,45、第一电推杆,46、喷头管,47、三通阀管,48、安装座,49、第二电推杆,410、涂料辊,411、第一齿轮,412、第二齿轮,413、传动皮带,414、第一电机,415、第一皮带轮,416、第二皮带轮,5、涂抹组件,51、涂抹组件外壳,52、转动座,53、连接框,54、伸缩杆,55、第三电推杆,56、框体,57、转动座,58、涂抹辊,59、连接杆,510、第四电推杆,6、控制器,7、颜料存储盒,8、自动调色盘,9、混合模块,10、灌装模块。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.请参阅图1-3,本发明提供一种技术方案:一种墙面修补装置,包括:手提箱1、充电舱2、爬墙机器人3、涂抹机构4、控制器6、颜料存储盒7、自动调色盘8、混合模块9和灌装模块
10;充电舱2开设在手提箱1的右侧底端,充电舱2具体使用型号根据实际使用要求直接从市场上购买安装并使用的,充电舱2可由控制器6进行控制,充电舱2可与外部电源进行连接,充电舱2内部设置有蓄电池可作为装置内部电器件供电电源使用,充电舱2也可作为爬墙机器人3收纳舱进行使用并对爬墙机器人3进行充电;爬墙机器人3可收纳在充电舱2的内部,爬墙机器人3具体使用型号根据实际使用要求直接从市场上购买安装并使用的,爬墙机器人3可由控制器6进行远程控制,爬墙机器人3采用折叠结构减小体积便于携带;涂抹机构4内嵌在爬墙机器人3的顶部开口处;控制器6放置在手提箱1的顶端凹槽内,控制器6分别与充电舱2和涂抹机构4远程网络连接,控制器6可收纳在充电舱2的内部,控制器6内部设置有网络模块可进行远程连接控制;颜料存储盒7设置在手提箱1的顶端且位于控制器6的后侧,颜料存储盒7内部存放不同种类颜色的颜料染剂罐;自动调色盘8内嵌在手提箱1的顶端右侧,自动调色盘8和控制器6远程网络连接,自动调色盘8具体使用型号根据实际使用要求直接从市场上购买安装并使用的,自动调色盘8可由控制器6进行远程控制,自动调色盘8内部预置程序将自身内部颜料依次转动至混合模块9对应位置处并进行注入实现配色;混合模块9内嵌在手提箱1的顶端且位于自动调色盘8的后侧,混合模块9和控制器6远程网络连接,混合模块9具体使用型号根据实际使用要求直接从市场上购买安装并使用的,混合模块9可由控制器6进行远程控制,可向混合模块9内部注入乳胶漆并与颜料进行混合搅拌;灌装模块10内嵌在手提箱1的右侧,灌装模块10和混合模块9相连接,灌装模块10和控制器6远程网络连接,灌装模块10具体使用型号根据实际使用要求直接从市场上购买安装并使用的,灌装模块10可由控制器6进行远程控制,可将存储舱43与灌装模块10进行对接,灌装模块10将混合模块9内部乳胶漆注入存储舱43内进行存储。
31.作为优选方案,更进一步的,涂抹机构4包括:涂抹机构外壳41、涂抹组件5、电动门42、存储舱43、电动泵44、第一电推杆45、喷头管46、三通阀管47、安装座48、第二电推杆49、涂料辊410、第一齿轮411、第二齿轮412、传动皮带413、第一电机414、第一皮带轮415和第二皮带轮416;涂抹机构外壳41内嵌在爬墙机器人3的顶部中心位置开口处;涂抹组件5沿左右方向设置在涂抹机构外壳41的顶端开口处;电动门42设置在涂抹组件5的上方;存储舱43内嵌在涂抹机构外壳41的底端右侧,存储舱43的底端眼神处手提箱1的外部,存储舱43的底端设置有阀门并可与灌装模块10相连接;电动泵44设置在手提箱1的内腔底端中心位置,电动泵44和控制器6远程网络连接,电动泵44的进料口眼神进存储舱43的内部,电动泵44具体使用型号根据实际使用要求直接从市场上购买安装并使用的,电动泵44可由控制器6进行远程控制将存储舱43内部乳胶漆由三通阀管47注入至喷头管46内;第一电推杆45第一电推杆45的数量为两个,两个第一电推杆45分别设置在涂抹机构外壳41的内腔中部顶端左右两侧,第一电推杆45和控制器6远程网络连接,上下两个第一电推杆45旋转一百八十度重合设置,第一电推杆45具体使用型号根据实际使用要求直接从市场上购买安装并使用的,第一电推杆45可由控制器6进行远程控制伸长缩短;喷头管46的数量为两个,两个喷头管46分别设置在左右两个第一电推杆45的伸缩端;三通阀管47一端螺接在电动泵44的出口处,三通阀管47的另外两端分别与两个喷头管46相螺接;安装座48的数量为两个,两个安装座48分别通过销轴转动连接在涂抹机构外壳41的内腔左右两侧;第二电推杆49的数量为两个,两个第二电推杆49一端分别通过销轴转动连接在涂抹机构外壳41的内腔左右两侧顶端,两个第二电推杆49的另一端分别与左右两个安装座48的外侧通过销轴转动连接,第二电推杆49
和控制器6远程网络连接,第二电推杆49具体使用型号根据实际使用要求直接从市场上购买安装并使用的,第二电推杆49可由控制器6进行远程控制伸长缩短;涂料辊410的数量为两个,两个涂料辊410分别沿前后方向通过销轴转动连接在左右两个安装座48的后侧顶端,涂料辊410的轴心眼神处安装座48的前侧;第一齿轮411的数量为两个,两个第一齿轮411分别键连接在左右两个涂料辊410的轴心前端;第二齿轮412的数量为两个,两个第二齿轮412分别键连接在左右两个安装座48的前侧底端,两个第二齿轮412分别与左右两个第一齿轮411啮合,安装座48自身转动同时可驱动第一齿轮411沿第二齿轮412外壁移动;传动皮带413两端分别螺钉连接在左右两个第二齿轮412的前端;第一电机414设置在涂抹机构外壳41的内腔左下方,第一电机414和控制器6远程网络连接,第一电机414具体使用型号根据实际使用要求直接从市场上购买安装并使用的,第一电机414可由控制器6进行远程控制驱动第一皮带轮415顺时针或逆时针方向转动;第一皮带轮415螺钉连接在第一电机414的输出端;第二皮带轮416螺钉连接在左侧第二齿轮412的轴心前端,第二皮带轮416和第一皮带轮415通过皮带传动连接。
32.作为优选方案,更进一步的,涂抹组件5包括:涂抹组件外壳51、转动座52、连接框53、伸缩杆54和第三电推杆55;涂抹组件外壳51沿左右方向设置在涂抹机构外壳41的顶端开口处,涂抹组件外壳51的内腔上下两侧分别与电动门42和涂抹机构外壳41的内侧相通转动座52的数量为两个,两个转动座52分别通过销轴转动连接在涂抹组件外壳51内侧左右两端,左右两个转动座52分别位于左右两个涂料辊410上方对应位置处;连接框53沿左右方向通过销轴转动连接在左右两个转动座52的内侧底端;伸缩杆54一端通过销轴转动连接在连接框53的内侧,伸缩杆54自身具有弹性可进行伸缩;第三电推杆55通过销轴转动连接在涂抹组件外壳51的内腔,第三电推杆55的伸缩端与伸缩杆54的另一端通过销轴转动连接,第三电推杆55和控制器6远程网络连接,第三电推杆55具体使用型号根据实际使用要求直接从市场上购买安装并使用的,第三电推杆55可由控制器6进行远程控制伸长缩短;其中,左右两个转动座52的内侧均设置有角度涂抹单元;角度涂抹单元包括:框体56、转动座57、涂抹辊58、连接杆59和第四电推杆510;框体56沿前后方向设置在转动座52的内侧顶端;转动座57通过轴承转动连接在框体56的内侧;涂抹辊58沿前后方向通过销轴转动连接在转动座57的内侧;连接杆59一端螺钉连接在转动座57的轴心;第四电推杆510沿前后方向设置在框体56的底端,第四电推杆510的伸缩端与连接杆59的另一端通过销轴转动连接,第四电推杆510和控制器6远程网络连接,第四电推杆510具体使用型号根据实际使用要求直接从市场上购买安装并使用的,第四电推杆510可由控制器6进行远程控制伸长缩短。
33.通过本领域人员,可将本案中所有电气件与外部适配的电源通过导线进行连接,并且应该根据具体实际使用情况,选择相适配的外部控制器进行连接,以满足对所有电器件的控制需求,其具体连接方式以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,不再进行说明,下述主要介绍工作原理以及过程,具体工作如下。
34.步骤1:使用前,工作人员根据需要修补的墙体颜色取出颜料存储盒7内部颜料罐并固定安装在自动调色盘8内,控制控制器6依次启动自动调色盘8和混合模块9,自动调色盘8内部预置程序将自身内部颜料依次转动至混合模块9对应位置处并进行注入,混合模块9将内部乳胶漆与对内部颜料进行混合搅拌得到适配墙面颜色乳胶漆,工作人员将存储舱
43与灌装模块10进行对接,灌装模块10将混合模块9内部乳胶漆注入存储舱43内进行存储:
35.步骤2:工作人员控制控制器6启动爬墙机器人3爬墙至指定修补位置处,并控制控制器6依次启动电动门42、第一电推杆45、电动泵44、第二电推杆49和第一电机414,电动门42内部开启解除密封,第一电推杆45通过自身伸长推动对应位置上的喷头管46向外侧移动以使喷头管46移动至于涂料辊410贴合位置处,电动泵44将存储舱43内部乳胶漆由三通阀管47注入至喷头管46内并由喷头管46喷涂在涂料辊410外壁,第二电推杆49通过自身伸长推动对应位置上安装座48以与涂抹机构外壳41销轴转动连接处为顶点向内侧转动,进而使安装座48驱动第一齿轮411沿第二齿轮412外壁移动并带动涂料辊410向内侧转动至与涂抹辊58外壁贴合位置处,第一电机414驱动第一皮带轮415转动,并使第二皮带轮416在第一皮带轮415旋转力的作用下驱动左侧第二齿轮412带动传动皮带413一端转动,右侧第二齿轮412在传动皮带413传动下同步转动,进而使左右两侧第一齿轮411在第二齿轮412旋转力的作用下转动,促使第一齿轮411驱动涂料辊410将其表面乳胶漆涂抹在涂抹辊58外壁:
36.步骤3:工作人员控制控制器6依次启动第三电推杆55和第四电推杆510,第三电推杆55通过自身缩短带动伸缩杆54向右侧移动,伸缩杆54在连接框53的配合下驱动转动座52以与涂抹组件外壳51内腔销轴转动连接处为顶点转动至竖直状态,进而使涂抹辊58移动处涂抹组件外壳51内腔,第四电推杆510通过自身伸长缩短驱动连接杆59一端前后移动,进而使连接杆59驱动转动座57轴心转动,以使转动座57改变涂抹辊58角度位置,进而调整涂抹方向,工作人员控制控制器6沿墙面移动进行涂抹进而达到对墙面修补目的;
37.从而可实现现有墙面有色乳胶漆的自动配色,保证乳胶漆配色均匀与准确,以避免影响装饰表面的效果,并且可实现棚顶等操作不便位置的自动涂抹修补,操作简单,省时省力。
38.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1