无顶触车辆对中装置的制作方法
1.本发明涉及车库停车设备领域,尤其涉及一种无顶触车辆对中装置。
背景技术:
2.车辆需要进入库进入出入口时,往往因为转弯的原因,导致车辆停止后存在一定的偏斜,无法停止到正确的位置,而这样会使搬运器在搬运车辆的过程中产生偏载,严重时会导致搬运器无法正常搬运车辆。
3.为了避免上述现象,通常会在车库的出入口设置对中装置,传统的对中装置使用的气囊加伸缩杆的形式,利用伸缩杆和气囊的顶触来使得汽车的轮毂对准,但是这种对准的方式对会汽车的车轮产生一个侧向力,会刮蹭汽车轮胎,对于扁平的轮胎,会使得轮毂上留下痕迹。
4.为了避免在对中时在轮毂上留下痕迹,专利公开文献cn112041521a中公开了一种车辆对中装置,在这种对中装置中,通过使用两个转盘以及两套圆辊组件来对齐车轮,这种对中装置中由于两个转盘是完全独立工作,且两套圆辊组件也是完全独立工作的,所以在对中时转盘与转盘之间缺乏机械联动结构,且圆辊组件与圆辊组件之间也缺乏机械联动结构,所以车辆在进行对中时,车辆进行对中时的同步性相对较差。
技术实现要素:
5.本发明针对上述问题,提出了一种无顶触车辆对中装置。
6.本发明采取的技术方案如下:
7.一种无顶触车辆对中装置,包括圆辊组件,所述圆辊组件包括框架以及转辊,所述转辊转动设置于框架上,框架上的转辊通过联动链轮与联动链条联动,还包括第一联动电机以及第二联动电机,所述圆辊组件有四个,四个圆辊组件的框架均固定设置,第一联动电机通过传动链条与两个圆辊组件上的转辊联动,所述第二联动电机通过传动链条与两个圆辊组件上的转辊联动。
8.本种对中装置中,设置了四个圆辊组件,每个圆辊组件用于承载一个车轮,当四个车轮停放到四个圆辊组件上之后,如果车辆需要进行对中,只需要开启第一联动电机或者第二联动电机,由于第一联动电机以及第二联动电机都与两个圆辊组件上的转辊联动,所以第一联动电机或者第二联动电机工作时,与之相配合的两个圆辊组件上的转辊都会转动,所以通过上述结构实现了两个圆辊组件之间的机械联动,这样可以快速将车辆对中,且对中时的同步性好。
9.综上所述,上述装置中通过设置电机以及传动链条,实现了两组圆辊组件上的的圆辊的机械联动,可以对车辆快速对中,且对中时的两组圆辊组件的同步性好。
10.具体本装置中有第一电联电机以及第二联动电机,第一联动电机联动的两组圆辊组件用于调整车辆的两个前轮,而第二联动电机联动的两组圆辊组件用于调整车辆的两个后轮。
11.具体本方案中第一联动电机以及第二联动电机的轴上都各自安装有一个双排马达链轮,每个双排马达链轮上安装有两条传动链条,每个双排马达链轮各自通过一条传动链条与一个圆辊组件上的导辊配合在一起。
12.具体本装置中,同一个圆辊组件中只要有一个转辊发生转动,其余的转辊都会沿着同样的方向进行转动。
13.具体为了适应不同轴距的车辆对中,用来承载两个后轮的圆辊组件上的转辊的长度长于用来承载前轮的两个圆辊组件上的转辊的长度。
14.可选的,还包括测距仪,所述测距仪设置于圆辊组件的一侧。
15.具体测距仪有四个,四个测距仪均固定设置,且四个测距仪各自位于一个框架的一侧,测距仪用来测量自身与车身之间的距离,可以通过计算对比四个测距仪与车身四个点的距离是否完成对中。
16.可选的,所述测距仪为激光测距仪或者超声波测距仪。
17.可选的,还包括位置检测组件,所述位置检测组件设置于圆辊组件的一侧。
18.在圆辊组件的一侧设置位置检测装置,是为了检测车轮在圆辊组件上的位置。避免出现车辆未停放到转辊组件上导致不能将汽车对中的情况。
19.可选的,所述位置检测组件包括发射光幕以及接收光幕。
20.具体位置检测组件包括发射光幕与接收光幕,发射光幕发射光线,接收光幕用于接收发射光幕发射出来的光线。
21.上述位置检测组件在安装时,首先将发射光幕设置于圆辊组件一侧,将接收光幕设置于另一个圆辊组件的一侧,车辆停放在接收光幕与发射光幕之间,当车辆停放到四个圆辊组件上之后,车轮会挡住部分光线,接收光幕只能接收到未被挡住的光线,这样既可判断出车轮所处的位置,通过车轮所处的的位置可以判断出车辆所处的位置。
22.可选的,所述位置检测组件不少于2组。
23.因为车辆有两个前轮与两个后轮,所以设置两组位置检测组件,两组位置检测组件分别用于检测车辆的两个前轮与两个后轮。
24.可选的,每个框架上的所有转辊都处于平行状态。
25.具体每个框架上相邻的两个转辊之间的距离是相等的,且相邻两个圆辊之间的距离小于轮胎的宽度,在进行对中时,圆辊的转动方向是垂直于车辆行进时车轮的转动方向的。
26.可选的,所述框架均处于一个平面内。
27.四个框架均处于一个平面内,即所有的转辊均位于一个平面内,这样可以确保车辆可以平稳停放。
28.本发明的有益效果是:通过设置电机以及传动链条,实现了两组圆辊组件上的的圆辊的机械联动,可以对车辆快速对中,且对中时的两组圆辊组件的同步性好。
附图说明:
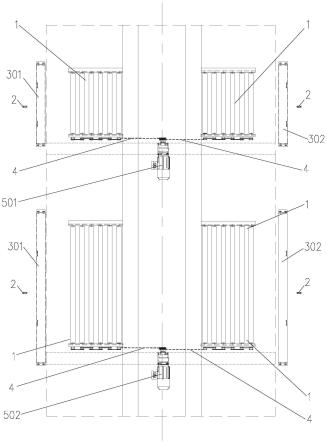
29.图1是无顶触车辆对中装置示意简图;
30.图2是第一联动电机与两个圆辊组件的配合关系示意图;
31.图3是第一联动电机与传动链条的配合关系示意图;
32.图4是位置检测装置的分布示意图;
33.图5是无顶触车辆对中装置工作原理示意图。
34.图中各附图标记为:1、圆辊组件;101、框架;102、转辊;103、链轮;104、联动链条;2、测距仪;301、发射光幕;302、接收光幕;4、传动链条;501、第一电机;502、第二电机;6、双排马达链轮;7、车轮。
具体实施方式:
35.下面结合各附图,对本发明做详细描述。
36.如附图1、附图2以及附图3所示,一种无顶触车辆对中装置,包括圆辊组件1,圆辊组件1包括框架101以及转辊102,转辊102转动设置于框架101上,框架101上的转辊102通过联动链轮103与联动链条104联动,还包括第一联动电机以及第二联动电机,圆辊组件1有四个,四个圆辊组件1的框架101均固定设置,第一联动电机通过传动链条4与两个圆辊组件1上的转辊102联动,第二联动电机通过传动链条4与两个圆辊组件1上的转辊102联动。
37.本种对中装置中,设置了四个圆辊组件1,每个圆辊组件1用于承载一个车轮,当四个车轮停放到四个圆辊组件1上之后,如果车辆需要进行对中,只需要开启第一联动电机或者第二联动电机,由于第一联动电机以及第二联动电机都与两个圆辊组件1上的转辊102联动,所以第一联动电机或者第二联动电机工作时,与之相配合的两个圆辊组件上的转辊102都会转动,所以通过上述结构实现了两个圆辊组件1之间的机械联动,这样可以快速将车辆对中,且对中时的同步性好。
38.综上,上述装置中通过设置电机以及传动链条4,实现了两组圆辊组件1上的的圆辊的机械联动,可以对车辆快速对中,且对中时的两组圆辊组件1的同步性好。
39.具体本装置中有第一电联电机以及第二联动电机,第一联动电机联动的两组圆辊组件1用于调整车辆的两个前轮,而第二联动电机联动的两组圆辊组件1用于调整车辆的两个后轮。
40.具体本方案中第一联动电机以及第二联动电机的轴上都各自安装有一个双排马达链轮6103,每个双排马达链轮6103上安装有两条传动链条4,每个双排马达链轮6103各自通过一条传动链条4与一个圆辊组件1上的导辊配合在一起。
41.具体本装置中,同一个圆辊组件1中只要有一个转辊102发生转动,其余的转辊102都会沿着同样的方向进行转动。
42.具体为了适应不同轴距的车辆对中,用来承载两个后轮的圆辊组件1上的转辊102的长度长于用来承载前轮的两个圆辊组件1上的转辊102的长度。
43.如附图1、附图2以及附图3所示,还包括测距仪2,测距仪2设置于圆辊组件1的一侧。
44.具体测距仪2有四个,四个测距仪2均固定设置,且四个测距仪2各自位于一个框架101的一侧,测距仪2用来测量自身与车身之间的距离,可以通过计算对比四个测距仪2与车身四个点之间的距离是否完成对中。
45.如附图1、附图2以及附图3所示,测距仪2为激光测距仪2或者超声波测距仪2。
46.如附图1、附图2以及附图3所示,还包括位置检测组件,位置检测组件设置于圆辊组件1的一侧。
47.在圆辊组件1的一侧设置位置检测装置,是为了检测车轮在圆辊组件1上的位置。避免出现车辆未停放到转辊102组件上导致不能将汽车对中的情况。
48.如附图1、附图2以及附图3所示,位置检测组件包括发射光幕301以及接收光幕302。
49.参看附图4中所示,具体位置检测组件包括发射光幕301与接收光幕302,发射光幕301发射光线,接收光幕302用于接收发射光幕301发射出来的光线。
50.上述位置检测组件在安装时,首先将发射光幕301设置于圆辊组件1一侧,将接收光幕302设置于另一个圆辊组件1的一侧,车辆停放在接收光幕302与发射光幕301之间,当车辆停放到四个圆辊组件1上之后,车轮7会挡住部分光线,接收光幕302只能接收到未被挡住的光线,这样既可判断出车轮所处的位置,通过车轮所处的的位置可以判断出车辆所处的位置。
51.如附图1、附图2以及附图3所示,位置检测组件不少于2组。
52.因为车辆有2个前轮与两个后轮,所以设置两组位置检测组件,两组位置检测组件分别用于检测车辆的两个前轮与两个后轮。
53.如附图1、附图2以及附图3所示,每个框架101上的所有转辊102都处于平行状态。
54.具体每个框架101上相邻的两个转辊102之间的距离是相等的,且相邻两个圆辊之间的距离小于轮胎的宽度,在进行对中时,圆辊的转动方向是垂直于车辆行进时车轮的转动方向的。
55.如附图1、附图2以及附图3所示,框架101均处于一个平面内。
56.四个框架101均处于一个平面内,即所有的转辊102均位于一个平面内,这样可以确保车辆可以平稳停放。
57.结合附图5所示,对本装置的工作过程做详细说明,一共四个测距仪2,首先车辆的两个前轮位置车身与两个测距仪2的距离分别为a1与a2,两个后轮位置车身与两个测距仪2的距离分别为b1与b2,其中a1大于a2,b1大于b2,对中时,承载两个前轮的圆辊组件1上的转辊102向右转动(如上方的箭头指向所示),承载两个后轮的圆辊组件1上的转辊102向左转动(如下方的箭头指向所示),最终调整对齐,对齐后a1等于a2,b1等于b2。
58.以上所述仅为本发明的优选实施例,并非因此即限制本发明的专利保护范围,凡是运用本发明说明书内容所作的等效变换,直接或间接运用在其他相关的技术领域,均同理包括在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1