一种前轮定位自动调姿载车台的制作方法
本发明涉及泊车设备,特别是涉及一种前轮定位自动调姿载车台。
背景技术:
1、智能立体车库,对于空间利用率具有非常高的要求,随着智能搬运技术不断更新,超薄搬运机械手的出现,有效降低整体立体车库的占用高度空间,但也提出对泊车前轮定位的需求。在立体车库宽度空间占用,泊车的姿态对宽度的占用有着非常大的影响。
2、在这技术背景状态下,研究一款具备前轮定位,泊车调姿功能的库台,去兼容超薄搬运机械手,降低泊车占用高度空间。具备泊车调整姿态功能,使其泊车校正,降低泊车占用宽度空间。由此通过该发明研究,从高度,宽度的研究应用,使智能立体车库的空间尺寸利用率有着显著提高。
3、该发明同时兼容需要回转时,不占用泊车的回转空间,且能运用于升降机。超薄扁平化设计,兼容较浅升降基坑,以及出入库台浅基坑。在泊车的宽度,泊车的车轮轴距,以及泊车调整姿态宽度范围都具备较高的兼容性。
技术实现思路
1、本发明主要解决的技术问题是提供一种前轮定位自动调姿载车台,以解决背景技术中存在的问题。
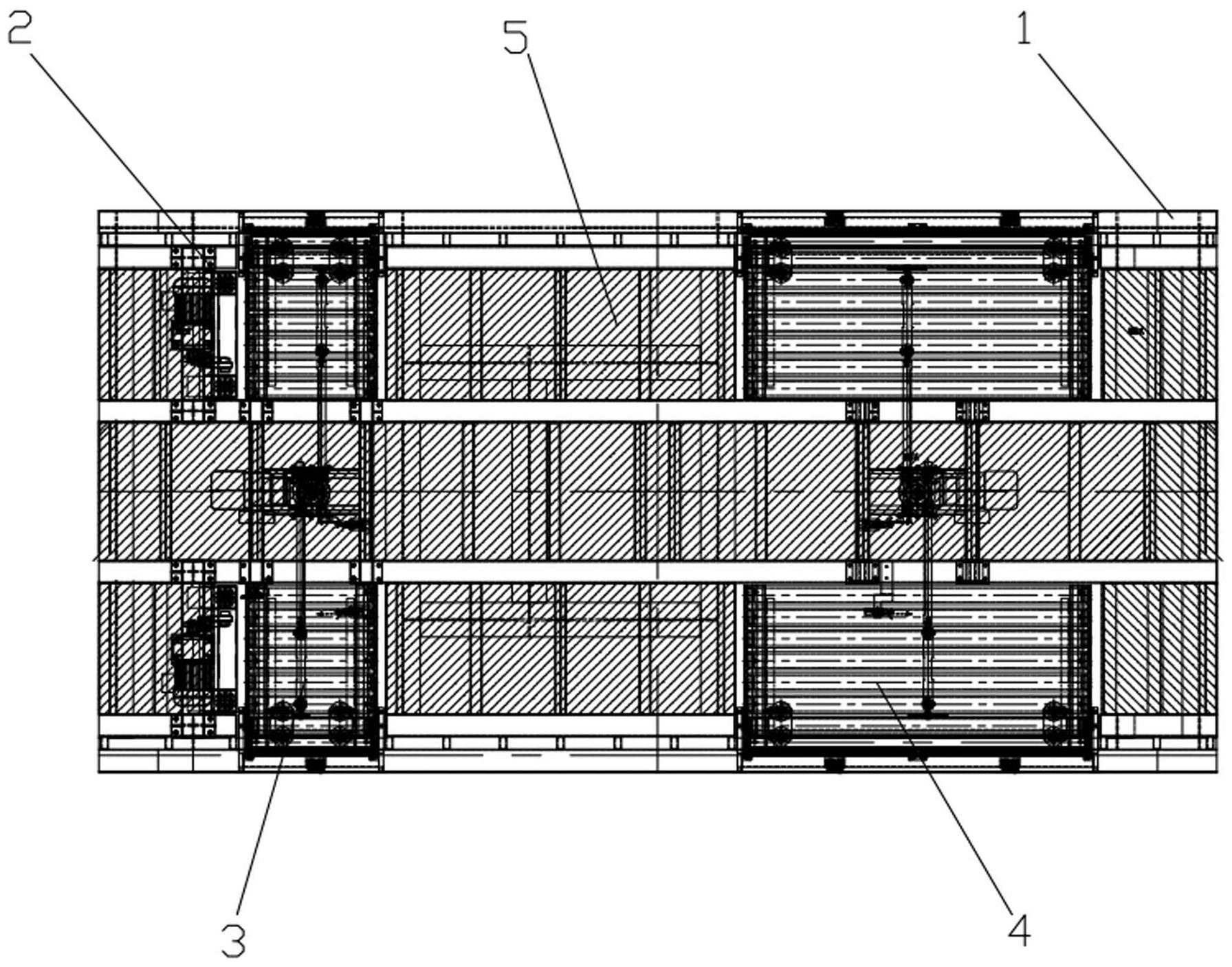
2、为解决上述技术问题,本发明采用的一个技术方案是:提供一种前轮定位自动调姿载车台,包括:可用于泊车回转的框架、设置在框架一端的车轮定位轮挡、设置在框架上的车姿调整系统、与车姿调整系统相配合且设置在框架上的泊车踏面滚轮以及设置在框架上的踏板。
3、在本发明一个较佳实施例中,所述车姿调整系统包括:前轮调姿系统和后轮调姿系统。
4、在本发明一个较佳实施例中,所述前轮调姿系统包括:前调姿机架、前调姿驱动电机、前调姿驱动齿轮、前调姿驱动齿条、前调姿传动组件、前调姿推杆、前调姿到位摆杆以及前调姿导轮,所述前调姿机架固定设置在框架上,所述前调姿驱动电机设置在前调姿机架上,所述前调姿驱动齿轮与前调姿驱动电机相连接,所述前调姿驱动齿条设置有2根且均与前调姿驱动齿轮配合连接,所述前调姿驱动齿条均通过前调姿传动组件联动连接前调姿推杆和前调姿到位摆杆,所述前调姿导轮设置在前调姿传动组件上,所述框架上设置有与前调姿导轮相配合的第一导轨。
5、在本发明一个较佳实施例中,所述前轮调姿系统还包括:所述前轮调姿系统还包括:前调姿到位传感器、前调姿极限传感器以及前调姿打开到位传感器。
6、在本发明一个较佳实施例中,所述后轮调姿系统包括:后调姿机架、后调姿驱动电机、后调姿驱动齿轮、后调姿驱动齿条、后调姿传动组件、后调姿推杆、后调姿到位摆杆以及后调姿导轮,所述后调姿机架固定设置在框架上,所述后调姿驱动电机设置在后调姿机架上,所述后调姿驱动齿轮与后调姿驱动电机相连接,所述后调姿驱动齿条设置有2根且均与后调姿驱动齿轮配合连接,所述后调姿驱动齿条均通过后调姿传动组件联动连接后调姿推杆和后调姿到位摆杆,所述后调姿导轮设置在后调姿传动组件上,所述框架上设置有与后调姿导轮相配合的第二导轨。
7、在本发明一个较佳实施例中,所述后轮调姿系统还包括:后调姿到位传感器、后调姿极限传感器以及后调姿打开到位传感器。
8、在本发明一个较佳实施例中,所述车轮定位轮挡包括:车轮定位轮挡机架、车轮定位轮挡驱动电机、车轮定位轮挡驱动拨叉、挡杆以及车轮定位轮挡升降到位传感器,所述车轮定位轮挡机架固定设置在框架上,所述车轮定位轮挡驱动电机设置在括车轮定位轮挡机架上,所述车轮定位轮挡驱动电机通过车轮定位轮挡驱动拨叉与挡杆传动连接,所述车轮定位轮挡升降到位传感器设置在车轮定位轮挡机架上。
9、在本发明一个较佳实施例中,所述车轮定位轮挡还包括:提升臂,所述车轮定位轮挡驱动电机的输出轴连接车轮定位轮挡驱动拨叉,所述车轮定位轮挡驱动拨叉上设置有叉槽,所述提升臂为曲柄结构,其一端设置有拨动轴与所述车轮定位轮挡驱动拨叉的叉槽匹配,另一端与挡杆固定连接,所述挡杆的两端设置有导柱。
10、在本发明一个较佳实施例中,所述泊车踏面滚轮包括:前泊车踏面滚轮机架、前泊车踏面滚轮、后泊车踏面滚轮机架以及后泊车踏面滚轮,所述前泊车踏面滚轮机架设置在框架上,所述前泊车踏面滚轮设置在前泊车踏面滚轮机架上,所述后泊车踏面滚轮机架设置在框架上,所述后泊车踏面滚轮设置在后泊车踏面滚轮机架上。
11、在本发明一个较佳实施例中,所述车姿调整系统的泊车调姿轴距范围:1800~3300mm,调姿车轮外宽范围:1480~2280mm。
12、本发明的有益效果是:本发明指出的一种前轮定位自动调姿载车台,具有以下优点:
13、1、前轮定位自动调姿载车台总厚度为412.5mm,完全满足库台浅坑500mm的深度需求,这超薄扁平化设计,兼容提升轿厢事项升降基坑1000mm的需求,回转空间直径φ5452mm<φ5800mm,兼容泊车回转空间;
14、2、车轮定位轮挡,具备升降功能,兼容了超薄机械手的搬运需求,同时实现无障碍接驳搬运, 这一兼容,节约了立体车库高度空间尺寸,车姿调整系统 ,实现了泊车姿态校正,节约立体车库的宽度尺寸;
15、3、在泊车尺寸兼容上:泊车调姿轴距范围:1800~3300mm, 调姿车轮外宽范围:1480~2280mm,同时兼容市场出现的小型电动车以及d型车(长x宽x高:5300mmx1950mmx1550mm)的尺寸需求;
16、4、前轮定位自动调姿载车台兼容的搬运技术,泊车尺寸需求,物料发运需求,回转空间需求等等,从根本上,提升智能立体车库的泊车空间利用率。
技术特征:
1.一种前轮定位自动调姿载车台,其特征在于,包括:可用于泊车回转的框架、设置在框架一端的车轮定位轮挡、设置在框架上的车姿调整系统、与车姿调整系统相配合且设置在框架上的泊车踏面滚轮以及设置在框架上的踏板。
2.根据权利要求1所述的前轮定位自动调姿载车台,其特征在于,所述车姿调整系统包括:前轮调姿系统和后轮调姿系统。
3.根据权利要求2所述的前轮定位自动调姿载车台,其特征在于,所述前轮调姿系统包括:前调姿机架、前调姿驱动电机、前调姿驱动齿轮、前调姿驱动齿条、前调姿传动组件、前调姿推杆、前调姿到位摆杆以及前调姿导轮,所述前调姿机架固定设置在框架上,所述前调姿驱动电机设置在前调姿机架上,所述前调姿驱动齿轮与前调姿驱动电机相连接,所述前调姿驱动齿条设置有2根且均与前调姿驱动齿轮配合连接,所述前调姿驱动齿条均通过前调姿传动组件联动连接前调姿推杆和前调姿到位摆杆,所述前调姿导轮设置在前调姿传动组件上,所述框架上设置有与前调姿导轮相配合的第一导轨。
4.根据权利要求3所述的前轮定位自动调姿载车台,其特征在于,所述前轮调姿系统还包括:前调姿到位传感器、前调姿极限传感器以及前调姿打开到位传感器。
5.根据权利要求2所述的前轮定位自动调姿载车台,其特征在于,所述后轮调姿系统包括:后调姿机架、后调姿驱动电机、后调姿驱动齿轮、后调姿驱动齿条、后调姿传动组件、后调姿推杆、后调姿到位摆杆以及后调姿导轮,所述后调姿机架固定设置在框架上,所述后调姿驱动电机设置在后调姿机架上,所述后调姿驱动齿轮与后调姿驱动电机相连接,所述后调姿驱动齿条设置有2根且均与后调姿驱动齿轮配合连接,所述后调姿驱动齿条均通过后调姿传动组件联动连接后调姿推杆和后调姿到位摆杆,所述后调姿导轮设置在后调姿传动组件上,所述框架上设置有与后调姿导轮相配合的第二导轨。
6.根据权利要求5所述的前轮定位自动调姿载车台,其特征在于,所述后轮调姿系统还包括:后调姿到位传感器、后调姿极限传感器以及后调姿打开到位传感器。
7.根据权利要求1所述的前轮定位自动调姿载车台,其特征在于,所述车轮定位轮挡包括:车轮定位轮挡机架、车轮定位轮挡驱动电机、车轮定位轮挡驱动拨叉、挡杆以及车轮定位轮挡升降到位传感器,所述车轮定位轮挡机架固定设置在框架上,所述车轮定位轮挡驱动电机设置在括车轮定位轮挡机架上,所述车轮定位轮挡驱动电机通过车轮定位轮挡驱动拨叉与挡杆传动连接,所述车轮定位轮挡升降到位传感器设置在车轮定位轮挡机架上。
8.根据权利要求7所述的前轮定位自动调姿载车台,其特征在于,所述车轮定位轮挡还包括:提升臂,所述车轮定位轮挡驱动电机的输出轴连接车轮定位轮挡驱动拨叉,所述车轮定位轮挡驱动拨叉上设置有叉槽,所述提升臂为曲柄结构,其一端设置有拨动轴与所述车轮定位轮挡驱动拨叉的叉槽匹配,另一端与挡杆固定连接,所述挡杆的两端设置有导柱。
9.根据权利要求1所述的前轮定位自动调姿载车台,其特征在于,所述泊车踏面滚轮包括:前泊车踏面滚轮机架、前泊车踏面滚轮、后泊车踏面滚轮机架以及后泊车踏面滚轮,所述前泊车踏面滚轮机架设置在框架上,所述前泊车踏面滚轮设置在前泊车踏面滚轮机架上,所述后泊车踏面滚轮机架设置在框架上,所述后泊车踏面滚轮设置在后泊车踏面滚轮机架上。
10.根据权利要求1所述的前轮定位自动调姿载车台,其特征在于,所述车姿调整系统的泊车调姿轴距范围:1800~3300mm,调姿车轮外宽范围:1480~2280mm。
技术总结
本发明公开了一种前轮定位自动调姿载车台,包括:可用于泊车回转的框架、设置在框架一端的车轮定位轮挡、设置在框架上的车姿调整系统、与车姿调整系统相配合且设置在框架上的泊车踏面滚轮以及设置在框架上的踏板。通过上述方式,本发明提供的前轮定位自动调姿载车台,前轮定位自动调姿载车台总厚度为412.5mm,完全满足库台浅坑500mm的深度需求,这超薄扁平化设计,兼容提升轿厢事项升降基坑1000mm的需求,回转空间直径φ5452mm<φ5800mm,兼容泊车回转空间;车轮定位轮挡,具备升降功能,兼容了超薄机械手的搬运需求,同时实现无障碍接驳搬运,这一兼容,节约了立体车库高度空间尺寸,车姿调整系统,实现了泊车姿态校正,节约立体车库的宽度尺寸。
技术研发人员:谷斐,康炎,段徽庆
受保护的技术使用者:南通科瑞恩智能装备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!