一种基于智能振捣台车的电气控制系统的制作方法
1.本实用新型涉及一种基于智能振捣台车的电气控制系统,属于铁路(公路)混凝土预制梁施工技术领域。
背景技术:
2.梁场的预制箱梁施工机械化、智能化施工技术体系尚未完善,预制梁场的箱梁混凝土振捣工作具有重复工作多,劳动量大的特点。很长时间以来,施工现场主要利用人工来操作。振捣工作主要是人工携带振捣设备进行振捣。在振捣时,振捣存在漏振、过振以及振捣不密实的问题,影响振捣质量。
3.目前,预制箱梁振捣施工需要人工数量较多,随着智能化、信息化的高速发展,将来人工密集型施工将被智能化所替代,研究智能混凝土振捣台车是本领域目前实施智能化、少人化梁场建设的一个必备条件,为本领域长远发展起到了很大的建设作用。
4.国内外关于一体式的智能振捣台车尚在研发与完善中。当前公开的智能振捣装置文献中,主要完成了以实现振捣一体化为目标的整体机构设计,但并未公开电气控制层面的实现方式,振捣设备的智能化仍是一大挑战。
技术实现要素:
5.为了解决现有技术的不足,本实用新型提供了一种基于智能振捣台车的电气控制系统,实现了对梁场箱梁模型振捣的自动化操作,能够减少人工投入,降低工人劳动强度,提高预制箱梁施工工艺智能化程度。
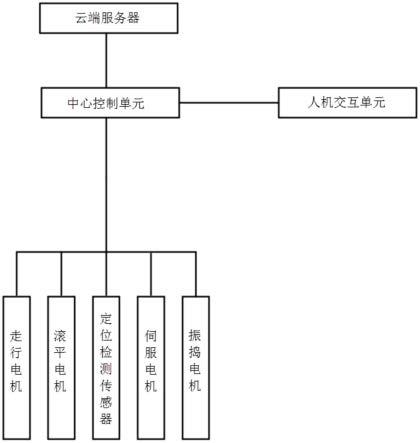
6.本实用新型为解决其技术问题所采用的技术方案是:提供了一种基于智能振捣台车的电气控制系统,包括中心控制单元,智能振捣台车包括主车架、走行车架、滚平车架、平移车架和操作平台,走行车架的底部设置走行机构,滚平车架下部设有滚平机构,平移车架通过平移机构安装于主车架上,平移车架中安装有升降车架和用于驱动升降车架上下移动的升降机构,升降车架底部安装有振捣棒,走行机构上设有用于驱动走行机构的走行电机,走行电机通过变频控制器与中心控制单元电性连接,滚平机构设有用于驱动滚平机构的滚平电机,走行机构、滚平机构、升降机构和平移机构上均设置有定位检测传感器,升降机构和平移机构还设置有伺服电机和振捣电机,滚平电机、各定位检测传感器、各伺服电机和各振捣电机分别与中心控制单元电性连接,中心控制单元通过无线传输模块与人机交互单元通讯。
7.变频控制器采用施耐德atv340系列变频器。
8.中心控制单元通过远程传输模块与云端服务器通信。
9.远程传输模块采用巨控grm530远程模块。
10.主车架设有用于振捣定位检测的视觉单元,视觉单元包括一组视觉识别相机以及与视觉识别相机电性连接的视觉控制器,视觉控制器与中心控制单元电性连接。
11.视觉识别相机采用康耐视专用视觉识别相机。
12.中心控制单元采用西门子s7-1500plc。
13.人机交互单元采用威纶通cmt1107x触摸屏。
14.本实用新型基于其技术方案所具有的有益效果在于:
15.(1)本实用新型提供的一种基于智能振捣台车的电气控制系统,完成了预制箱梁振捣施工设备的电气控制设计,通过中心控制单元连接振捣施工设备的各个机构并实现人机交互,通过人机界面单元进行系统参数设置、实时查看设备相关信息、现场施工控制,实现了对梁场箱梁模型振捣自动化操作,减少人工投入,降低工人劳动强度,提高预制箱梁施工工艺智能化程度。
16.(2)本实用新型提供的一种基于智能振捣台车的电气控制系统,可设置视觉单元,用于在预制箱梁绑扎完钢筋后,对所采集的钢筋图像中的钢筋位置进行图像数据采集,采集后通过计算并建立坐标系,通过与振捣棒位置坐标对比分析计算确定插入点位置坐标,实现自动对位,极大的提高了工作效率,同时也减少了人工投入。
17.(3)中心控制单元通过远程传输模块与云端服务器通信,实时读取设备运行数据,并发送至云端服务器,以对施工数据进行存储备份。
附图说明
18.图1是电气控制系统的模块连接示意图;
19.图2是智能振捣台车的振捣截面结构示意图;
20.图3是智能振捣台车的俯视图;
21.图4是智能振捣台车的滚平机构截面结构示意图;
22.图中:1-主车架,2-走行车架,3-滚平车架,4-平移车架,5-走行机构,6-滚平机构, 7-平移机构,8-升降机构,9-振捣棒,10-操作平台,11-预制的混凝土箱梁。
具体实施方式
23.下面结合附图和实施例对本实用新型作进一步说明。
24.本实用新型提供了一种基于智能振捣台车的电气控制系统,参照图1至图4,包括中心控制单元,智能振捣台车包括主车架1、走行车架2、滚平车架3、平移车架4和操作平台10,走行车架的底部设置走行机构5,滚平车架下部设有滚平机构6。
25.主车架和走行车架均采用桁架结构,主车架的两端插入在走行车架顶部的框架中,且两者之间通过丝杆螺母进行连接并能够调整走行车架在主车架上的横向位置,因此能够适应不同轨距要求,适应范围广,满足梁场的多种需求。
26.滚平车架安装于主车架的后部,其下部设置有用于对振捣后的混凝土进行整平的滚平机构6,且滚平车架及滚平机构相对于主车架的高度可调。滚平机构包括滚平辊轴、驱动电机、减速机和驱动链轮,滚平辊轴位于滚平车架的最底部,驱动电机通过减速机和驱动链轮驱动滚平辊轴旋转。滚平车架通过丝杆螺母机构与主车架相连接,并通过丝杆螺母机构在主车架上做升降运动,用来调整滚平机构和预制的混凝土箱梁11间的距离。
27.平移车架通过平移机构7安装于主车架上,平移车架中安装有升降车架和用于驱动升降车架上下移动的升降机构8,升降车架底部安装有振捣棒9,走行机构上设有用于驱动走行机构的走行电机,走行电机通过变频控制器与中心控制单元电性连接。变频控制器
采用施耐德atv340系列变频器,可实现变频调速,还可同时配套前后机械限位和红外限位双重保护。
28.滚平机构设有用于驱动滚平机构的滚平电机,走行机构、滚平机构、升降机构和平移机构上均设置有定位检测传感器,升降机构和平移机构还设置有伺服电机和振捣电机,滚平电机、各定位检测传感器、各伺服电机和各振捣电机分别与中心控制单元电性连接,中心控制单元通过无线传输模块与人机交互单元通讯。
29.人机交互单元可设置各类控制参数,可选择手/自动模式进行振捣功能,对预制梁模型进行作业。人机交互单元采用威纶通cmt1107x触摸屏,通过采用无线通讯的方式,用户可设置系统参数、实时查看设备相关信息。
30.中心控制单元通过远程传输模块与云端服务器通信,可实时读取设备运行数据,并发送至云端服务器。中心控制单元可采用西门子s7-1500plc。
31.远程传输模块采用巨控grm530远程模块。
32.主车架设有用于振捣定位检测的视觉单元,视觉单元包括一组视觉识别相机以及与视觉识别相机电性连接的视觉控制器,视觉控制器与中心控制单元电性连接。
33.视觉识别相机采用康耐视专用视觉识别相机,可将视觉信号经过运算处理后传递给中心控制单元。
34.本实用新型提供的一种基于智能振捣台车的电气控制系统的工作过程为:
35.(1)将人机交互单元的触摸屏通电运行,登陆后进入主画面。
36.(2)根据施工要求进振捣参数设置。
37.(3)用手动或自动模式进行振捣施工,包括以下流程:
38.启动走行机构,走行至第一个工位
→
启动视觉检测系统,进行振捣插入定位坐标计算
→
下放升降车架,将振捣棒插入混凝土中
→
如遇钢筋和振捣棒干涉,升降机构升起,重新进行视觉定位计算,平移机构平移,再插入混凝土中
→
振捣时间到,升起振捣车架,提起振捣棒
→
大车走行到下一工位,重复上面步骤。
39.(4)远程传输模块将实时读取到的设备运行数据发送至云端服务器进行保存,以便实现施工进度和质量的管理追踪。
40.本实用新型提供的一种基于智能振捣台车的电气控制系统完成了预制箱梁振捣施工设备的电气控制设计,通过中心控制单元连接振捣施工设备的各个机构并实现人机交互,通过人机界面单元进行系统参数设置、实时查看设备相关信息、现场施工控制,实现了对梁场箱梁模型振捣自动化操作,减少人工投入,降低工人劳动强度,提高预制箱梁施工工艺智能化程度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1