一种立体智能机械式停车夹举汽车搬运器的制作方法
本技术涉及汽车搬运,尤其涉及一种立体智能机械式停车夹举汽车搬运器。
背景技术:
1、目前在大型仓储类智能化的机械式停车设备中,就需要有高智能化运行的公交车搬运器。根据以往普通家用汽车的分类来看,目前普遍采用的车辆智能搬运器类型有载车板型、梳齿型、抱夹型,由于公交车体积与重量较大,所以市面上普遍使用载车板型搬运器来搬运公交车。
2、在抱夹型搬运器夹抱车辆轮胎时,轮胎的受力过程很复杂,夹持臂相向旋转慢慢接近轮胎,先接近轮胎的内侧,此时夹持臂的夹持面与轮胎外圆处于有角度接触,对车辆轮胎产生极大的挤压力,尽管大多数夹持臂上有减少轮胎摩擦的辊轮,但是从长期使用考虑,还是会对待存车辆轮胎产生损伤;仓储类的智能化机械式停车库的停车位较小,且停车人员停放车辆时,无法精确做到车辆完全对正载车位,因此需要对被停车辆进行机械对中校正,使得搬运器能够较为平衡的搬运被停车辆,并在搬运过程中,避免将被停车辆划伤或者发生碰撞。一般车辆对中的机构均设在车库进口的载车位上,往往会对司机停车时产生干扰,且制作较复杂,也增加了智能化的控制难度。
3、为此,我们设计了一种立体智能机械式停车夹举汽车搬运器。
技术实现思路
1、本实用新型的目的是为了解决现有的停车库停车位较小,且停车人员停放车辆时,无法精确做到车辆完全对正载车位问题,而提出的一种立体智能机械式停车夹举汽车搬运器。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种立体智能机械式停车夹举汽车搬运器,包括外框架、内框架以及分体式公交车对中举升搬运台车,所述分体式公交车对中举升搬运台车包括用于举升公交车前轮部分的前车体和举升公交车后轮部分的后车体,所述前车体和后车体内均包括相互独立的行走传动机构,所述行走传动机构设置在车体的外框架上,所述前车体和后车体通过距离传感器调整两者之间的距离。
4、优选地,所述前车体和后车体还包括自身独立运行的两组举升摆臂,所述举升摆臂收放在车体两侧的边缘以内,并旋转打开至垂直车体边缘。
5、优选地,所述前车体和后车体还包括自身独立运行的车辆对中机构,所述车辆对中机构位于两组举升摆臂之间,所述对中机构两端向垂直车体边缘方向做伸缩运动,所述对中机构伸出后两端的最大距离分别大于常规公交车的前车轮内距与后车轮内距。
6、优选地,所述前车体和后车体还包括自身独立运行的升降传动机构,所述升降传动机构位于内框架中间,所述升降传动机构带动内框架上下运动。
7、优选地,所述举升摆臂的旋转端设有涡轮蜗杆传动副,所述涡轮蜗杆传动副包括左旋涡轮蜗杆传动副和右旋涡轮蜗杆传动副,相邻的两组所述涡轮蜗杆传动副旋向均相反,所述举升摆臂还包括左旋蜗杆、右旋蜗杆和多个抱夹减速机电机,所述左旋蜗杆和右旋蜗杆分别连接两台抱夹减速机电机,所述举升摆臂上设有限位开关,所述限位开关在举升摆臂展开时触碰车轮产生控制所述抱夹减速机电机的控制信号。
8、优选地,所述车辆对中机构包括对中减速机电机、对中丝杠、右旋t型扣螺母、左旋t型扣螺母和对中模块,所述对中减速机电机输出端与对中丝杠相连,所述对中丝杠两端分别带动右旋t型扣螺母和左旋t型扣螺母,所述右旋t型扣螺母和左旋t型扣螺母分别带动对中模块做同步相向或反向运动。
9、优选地,所述升降传动机构包括升降减速机电机、升降主轴、升降主齿轮、传动齿轮和升降齿条,所述升降减速机电机输出端与升降主轴相连,所述升降主轴带动升降主齿轮转动,所述传动齿轮固定在内框架上,所述升降齿条固定连接在外框架上,所述升降主齿轮与传动齿轮相啮合,所述升降主齿轮和传动齿轮分别与相临的升降齿条相啮合。
10、优选地,所述前车体和后车体前后均设有缓冲隔离垫。
11、本实用新型的有益效果为:
12、1、本实用新型由于进出口车位和车库车位事先经过搬运台车寻址调校公交车前车轮的位置记录,当搬运台车工作时,所述前车体可直接到达被停放公交车的前轮胎位置,等待所述后车体到达被停放公交车后轮胎位置,在后车体进入被停放公交车通过公交车前轮之后,未到达公交车后轮之前,后车体的后方的一组摆臂完全张开,成“一”字形,随着“一”字形摆臂碰触到公交车后轮,“一”字形摆臂上的限位开关触发后车体行走机构电机制动和“一”字形摆臂电机启动使其闭合,此时前车体和后车体分别在被停公交车的前轮胎和后轮胎正下方,至此,通过前车体“电器寻址”和后车体“机械寻址”完成对不同轴距被停车辆的搬运准备,根据设备的机械结构来看:可以适应5米以上轴距的大部分常用公交车与电动公交车。
13、2、本实用新型采用举升摆臂上设有限位开关,限位开关在举升摆臂展开时可触碰车轮产生控制行走传动机构电机的控制信号,从而使搬运公交车后轮的后车体的运动可根据公交车的前后轮距进行精确定位。
技术特征:
1.一种立体智能机械式停车夹举汽车搬运器,包括外框架(20)、内框架(30)以及分体式公交车对中举升搬运台车(3),所述分体式公交车对中举升搬运台车(3)包括用于举升公交车前轮部分的前车体(301)和举升公交车后轮部分的后车体(302),其特征在于,所述前车体(301)和后车体(302)内均包括相互独立的行走传动机构(10),所述行走传动机构(10)设置在车体的外框架(20)上,所述前车体(301)和后车体(302)通过距离传感器调整两者之间的距离。
2.根据权利要求1所述的一种立体智能机械式停车夹举汽车搬运器,其特征在于,所述前车体(301)和后车体(302)还包括自身独立运行的两组举升摆臂(4),所述举升摆臂(4)收放在车体两侧的边缘以内,并旋转打开至垂直车体边缘。
3.根据权利要求1所述的一种立体智能机械式停车夹举汽车搬运器,其特征在于,所述前车体(301)和后车体(302)还包括自身独立运行的车辆对中机构(5),所述车辆对中机构(5)位于两组举升摆臂(4)之间,所述对中机构(5)两端向垂直车体边缘方向做伸缩运动,所述对中机构(5)伸出后两端的最大距离分别大于常规公交车的前车轮内距与后车轮内距。
4.根据权利要求1所述的一种立体智能机械式停车夹举汽车搬运器,其特征在于,所述前车体(301)和后车体(302)还包括自身独立运行的升降传动机构(6),所述升降传动机构(6)位于内框架(30)中间,所述升降传动机构(6)带动内框架(30)上下运动。
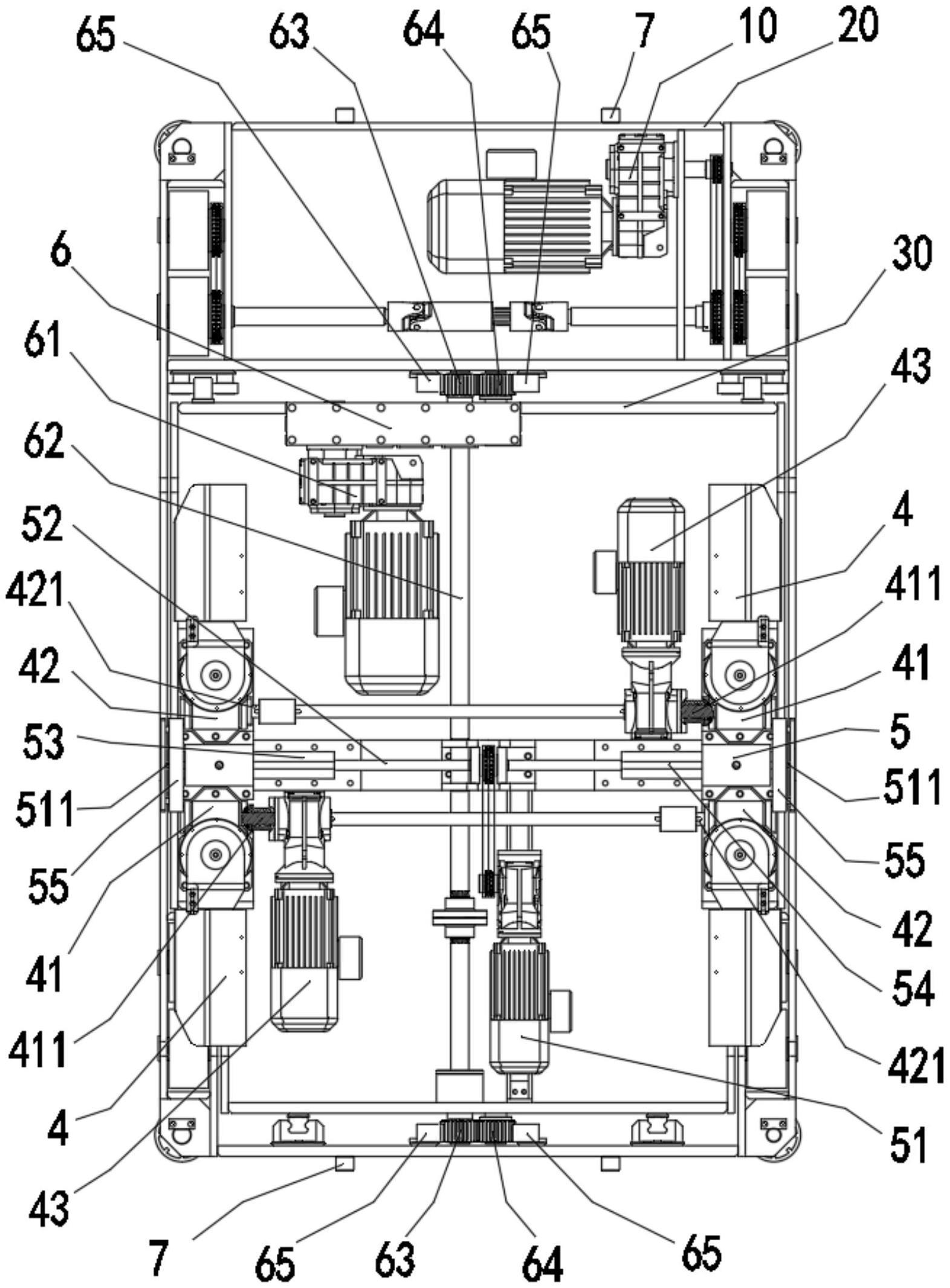
5.根据权利要求2所述的一种立体智能机械式停车夹举汽车搬运器,其特征在于,所述举升摆臂(4)的旋转端设有涡轮蜗杆传动副,所述涡轮蜗杆传动副包括左旋涡轮蜗杆传动副(41)和右旋涡轮蜗杆传动副(42),相邻的两组所述涡轮蜗杆传动副旋向均相反,所述举升摆臂(4)还包括左旋蜗杆(411)、右旋蜗杆(421)和多个抱夹减速机电机(43),所述左旋蜗杆(411)和右旋蜗杆(421)分别连接两台抱夹减速机电机(43),所述举升摆臂(4)上设有限位开关(401),所述限位开关(401)在举升摆臂(4)展开时触碰车轮产生控制所述抱夹减速机电机(43)的控制信号。
6.根据权利要求3所述的一种立体智能机械式停车夹举汽车搬运器,其特征在于,所述车辆对中机构(5)包括对中减速机电机(51)、对中丝杠(52)、右旋t型扣螺母(53)、左旋t型扣螺母(54)和对中模块(55),所述对中减速机电机(51)输出端与对中丝杠(52)相连,所述对中丝杠(52)两端分别带动右旋t型扣螺母(53)和左旋t型扣螺母(54),所述右旋t型扣螺母(53)和左旋t型扣螺母(54)分别带动对中模块(55)做同步相向或反向运动。
7.根据权利要求4所述的一种立体智能机械式停车夹举汽车搬运器,其特征在于,所述升降传动机构(6)包括升降减速机电机(61)、升降主轴(62)、升降主齿轮(63)、传动齿轮(64)和升降齿条(65),所述升降减速机电机(61)输出端与升降主轴(62)相连,所述升降主轴(62)带动升降主齿轮(63)转动,所述传动齿轮(64)固定在内框架(30)上,所述升降齿条(65)固定连接在外框架(20)上,所述升降主齿轮(63)与传动齿轮(64)相啮合,所述升降主齿轮(63)和传动齿轮(64)分别与相临的升降齿条(65)相啮合。
8.根据权利要求1所述的一种立体智能机械式停车夹举汽车搬运器,其特征在于,所述前车体(301)和后车体(302)前后均设有缓冲隔离垫(7)。
技术总结
本技术公开了一种立体智能机械式停车夹举汽车搬运器,包括外框架、内框架以及分体式公交车对中举升搬运台车包括用于举升公交车前轮部分的前车体和举升公交车后轮部分的后车体,所述前车体和后车体内均包括相互独立的行走传动机构,所述行走传动机构设置在车体的外框架上,所述前车体和后车体通过距离传感器调整两者之间的距离,所述前车体和后车体还包括自身独立运行的两组举升摆臂,所述举升摆臂收放在车体两侧的边缘以内。本技术采用举升摆臂上设有限位开关,限位开关在举升摆臂展开时可触碰车轮产生控制行走传动机构电机的控制信号,从而使搬运公交车后轮的后车体的运动可根据公交车的前后轮距进行精确定位。
技术研发人员:朱九龙,宋光义,杨嘉树,王晨光
受保护的技术使用者:辽源市重科机械有限责任公司
技术研发日:20220118
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!