一种回型结构智能立体车库的制作方法
本技术属于智能泊车,具体涉及一种回型结构智能立体车库。
背景技术:
1、随着科技的发展,无人驾驶汽车日趋增多,现有技术中,无人驾驶汽车已能自主停泊道路上的“一”形、“t”形和“//”形停车位,但是对于广大立体停车库,无人驾驶汽车而言确能力有限,尤其是面对停车层可以同时停泊2辆以上的立体停车库,无人驾驶车辆更是动不动就停车,其深层原因是在某一辆无人驾驶车泊车期间,有众多动态物被检测到,出于安全起见,这时的无人驾驶系统基于安全机制,往往选择停车等待,如此停泊效率将大大降低。因此,从以上现状可以看出,目前的自动泊车入库技术均为基于各自车辆的独立式智能入库方法,难以对周围环境进行统一的协调调度反应,基于此,本申请对智能泊车技术进行了进一步的研究,具体是设计了一种回型结构智能立体车库。
技术实现思路
1、针对以上现有技术中的不足,本实用新型提供了一种回型结构智能立体车库,能够很好的进行统筹智能泊车。
2、为了解决上述技术问题,本实用新型通过下述技术方案得以解决。
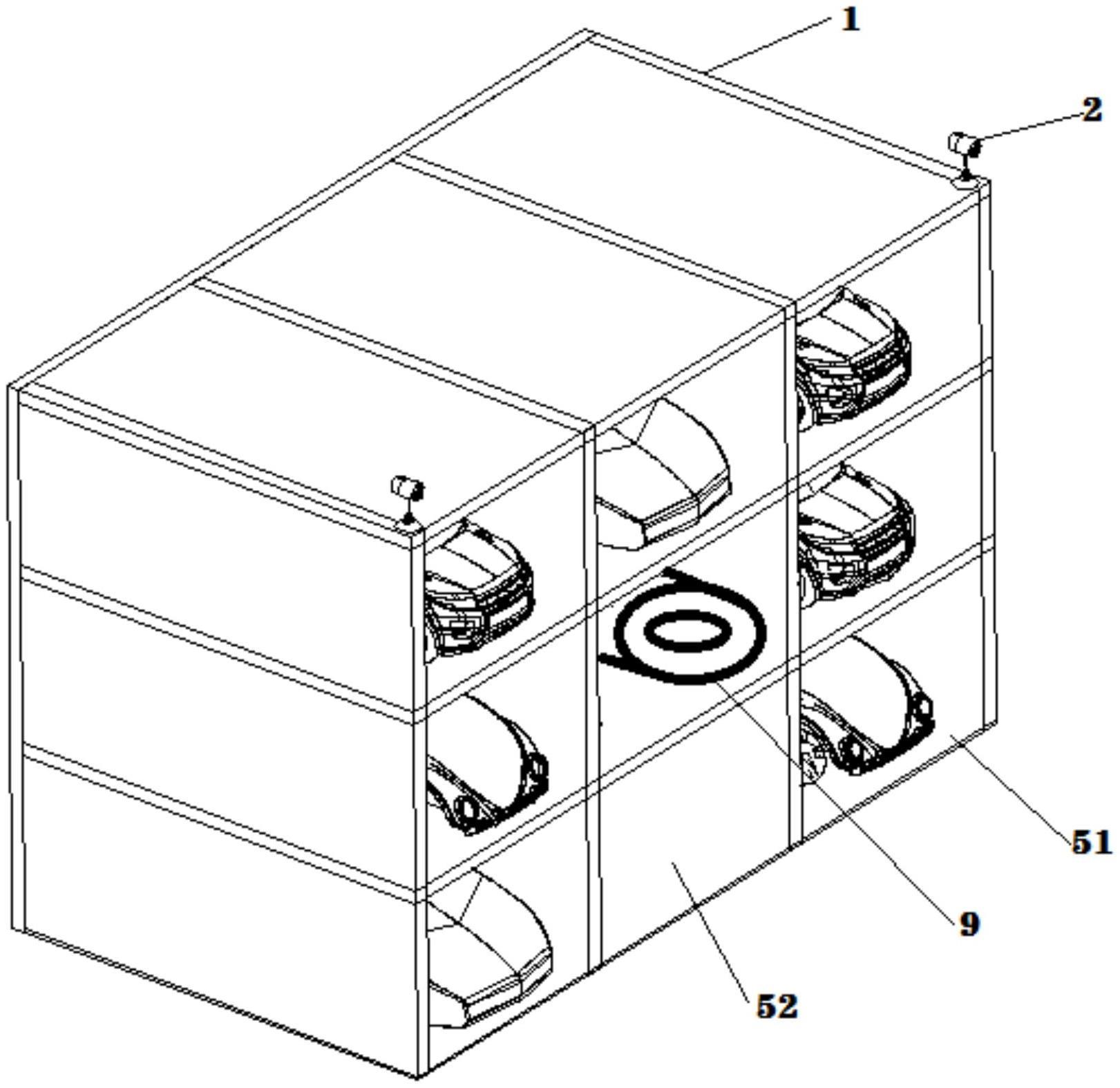
3、一种回型结构智能立体车库,所述智能立体车库至少包括2层结构,泊车层至少包括2个泊车承载板,其中,所述智能立体车库进一步包括所在建筑外表面设有若干3d探测器、通讯装置和路径生成器,所述3d探测器,用于根据泊车广场上的若干待泊无人驾驶汽车的车姿、当前位置生成泊车环境3d数据;所述路径生成器,根据所述泊车环境3d数据生成处理器生成若干泊车路径;所述通讯装置,用于将匹配的泊车路径传送给对应的所述待泊无人驾驶汽车;所述泊车层允许多辆无人驾驶汽车进行同时泊入/泊出。
4、一种优选的实施方式中,该智能立体车库为3层结构,所述泊车层至少包括3个泊车承载板,多个所述泊车承载板在所述智能立体车库中依据“回”字做顺时针或逆时针移动,所述泊车层的多个空泊车位允许同时进行泊车入库。
5、一种优选的实施方式中,生成的所述泊车环境3d数据包括被监测到的所述泊车广场中的障碍物。
6、一种优选的实施方式中,所述泊车路径从泊车层的空泊车位向所述泊车广场进行延伸,所述泊车路径泊分为多级别泊车路径,所述多级别泊车路径最终延伸至若干所述待泊无人驾驶汽车当下所在的位置。
7、一种优选的实施方式中,符合低级别泊车路径条件的所述待泊无人驾驶汽车首先获取路径参数和环境信息,并在车载驾驶系统下执行泊车移动;符合中级别泊车路径条件的所述待泊无人驾驶汽车获取路径参数和环境信息,并在车载驾驶系统下调整车位和车姿后,再执行泊车移动;符合高级别泊车路径条件的所述待泊无人驾驶汽车获取路径参数和环境信息,并在车载驾驶系统下移动避开阻碍物,再调整车位和车姿,最后执行泊车移动。
8、一种优选的实施方式中,所述障碍物分为不可移动障碍物和可移动障碍物,所述可移动障碍物具体为进入所述泊车广场的车辆、行人或小动物。
9、一种优选的实施方式中,所述进一步包括红外线探测器,所述红外线探测器,用于识别所述泊车广场的行人或小动物。
10、一种优选的实施方式中,车辆通过广播告知其驾驶员驱离,或者,向所述无人驾驶汽车传送所述泊车路径,引导其避让。
11、一种优选的实施方式中,所述3d探测器包括tof摄像头、双目摄像头、超声波雷达、毫米波雷达或激光雷达。与现有技术相比,本实用新型具有以下有益效果:提供了一种回型结构智能立体车库,通过其上的3d探测器、通讯装置和路径生成器等智能设备,与无人驾驶汽车的操控系统进行通讯可以联动,可以统筹进行车辆的智能泊车,改变了以往各自车辆的独立式智能入库方法,大大提高了智能泊车效率,避免了拥堵与意外的发生。
技术特征:
1.一种回型结构智能立体车库,所述智能立体车库至少包括2层结构,泊车层至少包括2个泊车承载板,其特征在于:所述智能立体车库进一步包括所在建筑外表面设有若干3d探测器、通讯装置和路径生成器,所述3d探测器,用于根据泊车广场上的若干待泊无人驾驶汽车的车姿、当前位置生成泊车环境3d数据;
2.根据权利要求1所述的一种回型结构智能立体车库,其特征在于,生成的所述泊车环境3d数据包括被监测到的所述泊车广场中的障碍物。
3.根据权利要求1或2所述的一种回型结构智能立体车库,其特征在于,所述泊车路径从泊车层的空泊车位向所述泊车广场进行延伸,所述泊车路径泊分为多级别泊车路径,所述多级别泊车路径最终延伸至若干所述待泊无人驾驶汽车当下所在的位置。
4.根据权利要求3所述的一种回型结构智能立体车库,其特征在于,符合低级别泊车路径条件的所述待泊无人驾驶汽车首先获取路径参数和环境信息,并在车载驾驶系统下执行泊车移动;符合中级别泊车路径条件的所述待泊无人驾驶汽车获取路径参数和环境信息,并在车载驾驶系统下调整车位和车姿后,再执行泊车移动;符合高级别泊车路径条件的所述待泊无人驾驶汽车获取路径参数和环境信息,并在车载驾驶系统下移动避开阻碍物,再调整车位和车姿,最后执行泊车移动。
5.根据权利要求2所述的一种回型结构智能立体车库,其特征在于,所述障碍物分为不可移动障碍物和可移动障碍物,所述可移动障碍物具体为进入所述泊车广场的车辆、行人或小动物。
6.根据权利要求4所述的一种回型结构智能立体车库,其特征在于,所述进一步包括红外线探测器,所述红外线探测器,用于识别所述泊车广场的行人或小动物。
7.根据权利要求1所述的一种回型结构智能立体车库,其特征在于,车辆通过广播告知其驾驶员驱离,或者,向所述无人驾驶汽车传送所述泊车路径,引导其避让。
8.根据权利要求1所述的一种回型结构智能立体车库,其特征在于,所述3d探测器包括tof摄像头、双目摄像头、超声波雷达、毫米波雷达或激光雷达。
技术总结
一种回型结构智能立体车库,所述智能立体车库至少包括2层结构,泊车层至少包括2个泊车承载板,其中,所述智能立体车库进一步包括所在建筑外表面设有若干3D探测器、通讯装置和路径生成器,所述3D探测器,用于根据泊车广场上的若干待泊无人驾驶汽车的车姿、当前位置生成泊车环境3D数据;所述路径生成器,根据所述泊车环境3D数据生成处理器生成若干泊车路径;所述通讯装置,用于将匹配的泊车路径传送给对应的所述待泊无人驾驶汽车;所述泊车层允许多辆无人驾驶汽车进行同时泊入/泊出。
技术研发人员:请求不公布姓名
受保护的技术使用者:上海萃钛智能科技有限公司
技术研发日:20220411
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!