一种陶粒板自动拔插管机的移栽抓取机构的制作方法
1.本实用新型涉及陶粒板生产技术领域,更具体地说,本实用新型涉及一种陶粒板自动拔插管机的移栽抓取机构。
背景技术:
2.陶粒板观特征大部分呈圆形或椭圆形球体,但也有一些仿碎石陶粒不是圆形或椭圆形球体,而呈不规则碎石状。陶粒形状因工艺不同而各异。它的表面是一层坚硬的外壳,这层外壳呈陶质或釉质,具有隔水保气作用,并且赋予陶粒较高的强度。因为生产陶粒的原料很多,陶粒的品种也很多,因而颜色也就很多。焙烧陶粒的颜色大多为暗红色、赭红色,也有一些特殊品种为灰黄色、灰黑色、灰白色、青灰色等。免烧陶粒因所用固体废弃物不同,颜色各异。
3.陶粒板在生产加工过程中需要使用管芯插入陶粒板预制模具内,生产完成后再拔出,目前通常都是人工进行插芯拔芯的操作,人工操作,所需工人较多,在操作过程中存在安全隐患,而且管芯的输送通常人工一次性只能拿取一根进行搬运,整体效率较低,因此,发明一种陶粒板自动拔插管机的移栽抓取机构很有必要。
技术实现要素:
4.为了克服现有技术的上述缺陷,本实用新型的实施例提供一种陶粒板自动拔插管机的移栽抓取机构。
5.为实现上述目的,本实用新型提供如下技术方案:一种陶粒板自动拔插管机的移栽抓取机构,包括桁架,所述桁架表面滑动设有支撑板,所述支撑板表面设有竖向调节板,所述竖向调节板前侧滑动设有第一活动板,所述竖向调节板后侧表面设有第一驱动电机,所述第一驱动电机用于驱动所述第一活动板在所述竖向调节板表面移动,所述第一活动板前侧设有第二活动板,所述第二活动板与所述第一活动板之间设有送料气缸,所述第二活动板两端部均设有夹爪组件,所述夹爪组件包括夹爪臂和夹爪座,所述夹爪座用于驱动所述夹爪臂移动。
6.在一个优选地实施方式中,所述桁架靠近所述支撑板的表面设有滑槽,所述支撑板后侧设有滑块且与所述滑槽相匹配,所述支撑板后侧表面设有第二驱动电机,所述第二驱动电机输出端传导设有导向盘,所述导向盘与所述滑块连接。
7.在一个优选地实施方式中,所述第一活动板两侧均设有卡槽,所述卡槽与所述竖向调节板外壁滑动连接。
8.在一个优选地实施方式中,所述送料气缸用于驱动所述第二活动板向外侧移动。
9.在一个优选地实施方式中,所述夹爪臂和所述夹爪座数量均设置为两个,所述夹爪臂内侧连接有活动块,所述活动块内部贯穿设有传动轴且延伸至所述夹爪座内部,所述夹爪座内部设有转动电机,所述转动电机输出端与所述传动轴相匹配。
10.在一个优选地实施方式中,所述夹爪臂内侧固定设有定位槽座,所述定位槽座内
壁设置于抓紧槽口。
11.在一个优选地实施方式中,所述夹爪组件底部设有升降气缸,所述升降气缸输出端设有驱动杆,所述驱动杆顶部设有举升板。
12.在一个优选地实施方式中,所述升降气缸一侧设有送料仓,所述送料仓用于输送物料,所述桁架设置于所述送料仓顶部。
13.本实用新型的技术效果和优点:
14.1、本实用新型通过设有第二活动板和夹爪组件,第二活动板两端的夹爪组件可以将管芯抓取,夹爪组件的夹爪座内部的转动电机工作可以调整夹爪臂的开合度,两个夹爪座内部转动电机同时工作可以调整整个夹爪组件的角度,夹爪臂张开后可以通过定位槽座贴紧管芯再夹住,随后可以带动管芯的移动,同时送料气缸工作可以调整二活动板的位置,将夹爪组件向外侧推动,能够将抓取后的管芯向外侧移送至下一加工组件,能够实现简单高效的自动抓取和输送的工作;
15.2、通过设有桁架、支撑板和竖向调节板,第一驱动电机工作可以调整第一活动板在竖向调节板竖直方向的位置,从而实现根据抓取需求调整夹爪组件的高度,第二驱动电机工作可以调整支撑板在桁架上水平方向的位置,从而实现根据抓取需求调整夹爪组件的横向位置,另外在送料气缸的配合下,能够实现针对不同型号管芯的抓取和输送工作,满足不同的工作需求。
附图说明
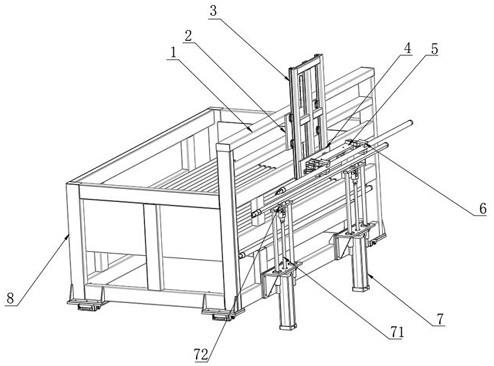
16.图1为本实用新型的整体结构示意图。
17.图2为本实用新型的整体结构俯视图。
18.图3为本实用新型的夹爪组件结构示意图。
19.附图标记为:1桁架、2支撑板、3竖向调节板、4第一活动板、41送料气缸、5第二活动板、6夹爪组件、61夹爪臂、62夹爪座、63活动块、64定位槽座、7升降气缸、71驱动杆、72举升板、8送料仓。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.根据图1-3所示的一种陶粒板自动拔插管机的移栽抓取机构,包括桁架1,桁架1表面滑动设有支撑板2,支撑板2表面设有竖向调节板3,竖向调节板3前侧滑动设有第一活动板4,竖向调节板3后侧表面设有第一驱动电机,第一驱动电机用于驱动第一活动板4在竖向调节板3表面移动,第一活动板4前侧设有第二活动板5,第二活动板5与第一活动板4之间设有送料气缸41,第二活动板5两端部均设有夹爪组件6,夹爪组件6包括夹爪臂61和夹爪座62,夹爪座62用于驱动夹爪臂61移动。
22.桁架1靠近支撑板2的表面设有滑槽,支撑板2后侧设有滑块且与滑槽相匹配,支撑板2后侧表面设有第二驱动电机,第二驱动电机输出端传导设有导向盘,导向盘与滑块连
接,第二驱动电机工作可以调整支撑板2在桁架1上水平方向的位置,从而实现根据抓取需求调整夹爪组件6的横向位置。
23.活动板4两侧均设有卡槽,卡槽与竖向调节板3外壁滑动连接,第一驱动电机工作可以调整活动板4在竖向调节板3竖直方向的位置,从而实现根据抓取需求调整夹爪组件6的高度。
24.送料气缸41用于驱动活动板5向外侧移动,送料气缸41工作可以调整活动板5的位置。
25.夹爪臂61和夹爪座62数量均设置为两个,夹爪臂61内侧连接有活动块63,活动块63内部贯穿设有传动轴且延伸至爪座62内部,爪座62内部设有转动电机,转动电机输出端与传动轴相匹配,夹爪组件6的夹爪座62内部的转动电机工作可以调整夹爪臂61的开合度,两个夹爪座62内部转动电机同时工作可以调整整个夹爪组件6的角度。
26.夹爪臂61内侧固定设有定位槽座64,定位槽座64内壁设置于抓紧槽口,夹爪臂61张开后可以通过定位槽座64贴紧管芯再夹住,随后可以带动管芯的移动。
27.夹爪组件6底部设有升降气缸7,升降气缸7输出端设有驱动杆71,驱动杆71顶部设有举升板72,升降气缸7可以带动驱动杆71升起,驱动杆71推动举升板72将其顶部卡住的管芯向上输送,进入夹爪组件6的抓取范围。
28.升降气缸7一侧设有送料仓8,送料仓8用于输送物料,桁架1设置于送料仓8顶部。
29.本实用新型工作原理:
30.参照说明书附图1和图2:第一驱动电机工作可以调整活动板4在竖向调节板3竖直方向的位置,从而实现根据抓取需求调整夹爪组件6的高度,第二驱动电机工作可以调整支撑板2在桁架1上水平方向的位置,从而实现根据抓取需求调整夹爪组件6的横向位置,另外在送料气缸41的配合下,能够实现针对不同型号管芯的抓取和输送工作,满足不同的工作需求;
31.参照说明书附图1和图3:活动板5两端的夹爪组件6可以将管芯抓取,夹爪组件6的夹爪座62内部的转动电机工作可以调整夹爪臂61的开合度,两个夹爪座62内部转动电机同时工作可以调整整个夹爪组件6的角度,夹爪臂61张开后可以通过定位槽座6464贴紧管芯再夹住,随后可以带动管芯的移动,同时送料气缸41工作可以调整活动板5的位置,将夹爪组件6向外侧推动,能够将抓取后的管芯向外侧移送至下一加工组件,能够实现简单高效的自动抓取和输送的工作。
32.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
33.其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
34.最后:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1