用于控制可调整的分配桅杆的运动的方法和系统以及用于借助于具有可调整的分配桅杆的建筑材料和/或稠料泵装置分配建筑材料和/或稠料的方法与流程
本发明涉及一种尤其分别用于控制可调整的分配桅杆的运动的方法和系统,以及一种用于借助于具有可调整的分配桅杆的建筑材料和/或稠料泵装置分配建筑材料和/或稠料的方法,该方法具有这样的用于控制可调整的分配桅杆的运动的方法。
背景技术:
技术实现思路
1、本发明基于如下任务,提供一种尤其分别用于控制可调整的分配桅杆的运动的方法和系统,该方法和系统分别具有改善的性质,以及一种用于借助于具有可调整的分配桅杆的建筑材料和/或稠料泵装置分配建筑材料和/或稠料的方法,该方法具有这样的用于控制可调整的分配桅杆的运动的方法。
2、本发明通过提供一种具有权利要求1的特征的方法、一种具有权利要求9的特征的方法和一种具有权利要求10的特征的系统来解决该任务。本发明的有利的改进方案和/或设计方案在从属权利要求中进行描述。
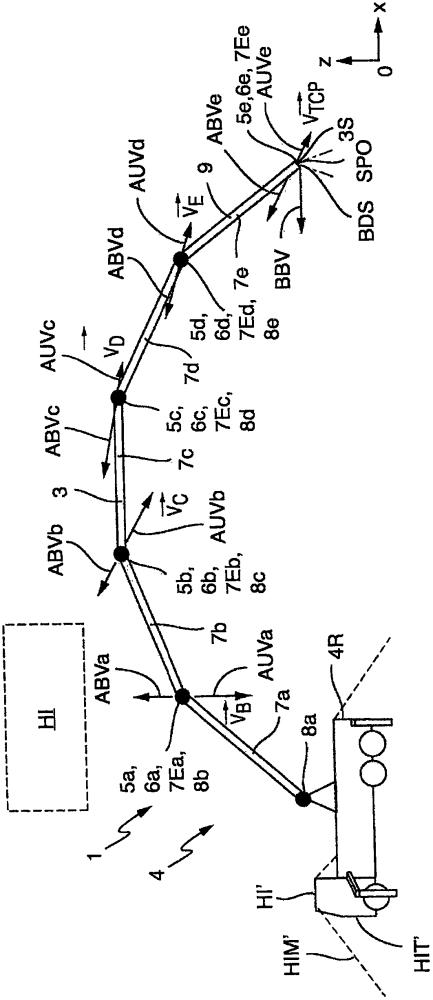
3、根据本发明的、尤其自动的方法构造或配置或设置用于尤其自动控制可调整的、尤其可灵活调整的分配桅杆的运动或行进或调整。分配桅杆包括或具有多个尤其可灵活调整的桅杆部件。分配桅杆的桅杆顶端的至少一个相同的顶端位置、尤其顶端位置的相同的值可以通过桅杆构件的不同的位置组合或位置配置、尤其位置组合的不同的值来实现。该方法包括或具有如下步骤:a)确定、尤其自动确定和/或检测和/或计算分配桅杆的多个桅杆元件、尤其所述多个桅杆元件关于针对桅杆元件的至少一个、尤其每个和/或相应的、尤其下一个障碍物、尤其至少所述障碍物的尤其相应的和/或多个矢量性间距参量、尤其间距参量和/或尤其几何间距矢量的值。b)基于所确定的间距参量来确定、尤其自动确定和/或计算针对桅杆构件中的多个、尤其所有桅杆构件的尤其相应的矢量性避让运动参量、尤其避让运动参量和/或尤其几何避让运动矢量的值。c)根据所确定的避让运动参量和确定尤其桅杆顶端的顶端位置、尤其顶端位置的值的矢量性操作者运动参量、尤其操作者运动参量和/或尤其几何操作者运动矢量的至少一个值来控制、尤其自动控制运动。
4、这实现在分配桅杆运动或行进时或随着、尤其同时随着分配桅杆的运动或行进分配桅杆对至少所述障碍物的尤其主动避让,尤其以到达尤其所确定的顶端位置。因此,这实现分配桅杆的尤其进一步的运动的阻断或停止的避免,尤其以避免分配桅杆与至少所述障碍物的尤其面临的或即将的接触或碰撞。因此,这实现尤其所确定的顶端位置的到达。
5、尤其,这实现在没有不必要的工作中断的情况下的尤其所监测的运行的安全性。因此,这实现被监测、尤其所监测的运行的接受度和因此其使用频率的提高。因此,这实现在分配桅杆的运动或运行中安全性的提高。附加地或备选地,这、尤其所述避让实现尤其在狭窄的工作环境中的单手运行中分配桅杆的流畅运行。因此,这实现尤其对于无经验的操作者或使用者来说分配桅杆的操作的明显简化,并且因此一方面实现生产率的提高和另一方面由于注意力集中于桅杆顶端而实现安全性的提高。
6、尤其,概念“自主”可以同义地用于概念“自动”。
7、分配桅杆可以是建筑材料和/或稠料分配桅杆。附加地或备选地,分配桅杆可以是建筑材料和/或稠料泵装置。尤其,建筑材料和/或稠料泵装置可以是可移动的、尤其可行进的,尤其是汽车建筑材料和/或稠料泵。此外附加地或备选地,建筑材料和/或稠料泵装置可以构造用于输送建筑材料和/或稠料。此外附加地或备选地,建筑材料可以表示灰泥、水泥、砂浆、混凝土和/或抹灰。此外附加地或备选地,稠料可以表示泥浆。
8、桅杆顶端的至少相同的顶端位置可以通过桅杆构件的至少三个、尤其至少十个不同的位置组合来实现。
9、桅杆顶端的多个、尤其至少三个、尤其至少十个顶端位置可以尤其在不同的时间点通过桅杆构件的尤其相应不同的位置组合来实现。
10、桅杆顶端可以是分配桅杆的自由端。
11、分配桅杆可以具有尤其自由悬挂的末端软管尤其作为多个桅杆元件中的一个。
12、桅杆元件可以具有桅杆构件,且/或桅杆构件可以具有、尤其是桅杆元件。
13、概念“运动边界”或概念“干扰轮廓”或概念“障碍地区”可以同义地用于概念“障碍物”。
14、障碍物可以是动态的和/或其他分配桅杆。
15、间距参量可以是和/或针对分配桅杆的多个桅杆元件在尤其瞬时或当前的实际桅杆位置或实际桅杆姿势中的尤其瞬时或当前的实际间距参量。尤其,实际桅杆位置可以尤其通过尤其可改变的位置组合来改变。附加地或备选地,间距参量可以是桅杆元件关于至少所述障碍物的间距的尤其瞬时或当前的方向、尤其实际方向和/或尤其瞬时或当前的量值、尤其实际量值。
16、避让运动参量可以是尤其瞬时或当前的理论避让运动参量。附加地或备选地,避让运动参量可以是多个桅杆构件的尤其相应的和/或多个避让运动、尤其理论避让运动的尤其瞬时或当前的方向、尤其理论方向和/或尤其瞬时或当前的速度、尤其理论速度。
17、确定顶端位置的操作者运动参量可以是和/或确定尤其桅杆顶端的尤其瞬时或当前的理论顶端位置的尤其瞬时或当前的操作者运动参量。附加地或备选地,操作者运动参量可以是桅杆顶端的运动、尤其理论运动的尤其瞬时或当前的方向、尤其理论方向和/或尤其瞬时或当前的速度、尤其理论速度。此外附加地或备选地,操作者运动参量可以是尤其瞬时或当前的行进指令或行进命令,尤其以到达顶端位置。此外附加地或备选地,操作者运动参量可以尤其通过尤其分配桅杆和/或建筑材料和/或稠料泵装置的操作者或使用者尤其瞬时或当前地预设。此外附加地或备选地,该方法可以具有如下步骤:确定、尤其检测操作者运动参量尤其通过操作者的尤其瞬时或当前的预设。
18、如果操作者运动参量未预设或不存在和/或为零,则不需要或不能够实施步骤c),或者不需要或不能够控制分配桅杆的运动。
19、步骤c)可以具有:借助于避让运动参量和操作者运动参量相互的联结或组合或叠加、尤其借助于运动学关系来控制运动。
20、步骤b)可以在时间上在步骤a)之后进行实施。附加地或备选地,步骤c)可以在时间上在步骤b)之后进行实施。此外附加地或备选地,该方法、尤其步骤a)、b)和c)可以尤其多次重新尤其进行实施。
21、在本发明的一个改进方案中,桅杆构件是同类的,尤其分配桅杆的桅杆部段或桅杆区段的端部、尤其分配桅杆的桅杆顶端和尤其可灵活调整的桅杆铰接部、尤其中间桅杆铰接部是同类的。尤其,桅杆铰接部中的至少一个桅杆铰接部可以是弯折-、转动-和/或剪切铰接部。尤其,最后一个桅杆铰接部可以绕着竖直轴线转动。附加地或备选地,建筑材料和/或稠料泵装置、尤其分配桅杆可以具有多个用于运动或调整桅杆铰接部的铰接驱动装置。
22、在本发明的一个改进方案中,矢量性避让运动参量指向或引导远离尤其相应的障碍物。尤其,矢量性避让运动参量与尤其相应的矢量性间距参量相反。这实现桅杆构件中的至少一个桅杆构件远离障碍物的运动或调整和/或尤其因此间距参量中的至少一个间距参量的增大。
23、在本发明的一个改进方案中,步骤c)具有:取决于或基于间距参量尤其以及操作者运动参量的尤其相应的量值借助于避让运动参量的尤其自动加权尤其借助于尤其相应的可改变的加权因子、尤其加权因子的值来控制运动。这实现桅杆构件中的一个桅杆构件的紧迫的避让相对于桅杆构件中的其他桅杆构件的不太紧迫或不紧迫的避让或运动的优先权或优先级,尤其以避免接触。尤其,加权因子可以取决于间距参量的量值是互补的。附加地或备选地,操作者运动参量的加权因子可以尤其在时间上是持久的、固定的或恒定的。此外附加地或备选地,这、尤其加权可以导致避让运动参量和操作者运动参量不能够相互一致,尤其避让运动参量超过操作者运动参量。因此,这可以导致不需要或不能够控制分配桅杆的运动。
24、在本发明的一个改进方案、尤其设计方案中,该方法包括或具有尤其如下步骤:存储、尤其自动存储分配桅杆的所控制的或所实施的运动。该方法包括或具有如下步骤:如果避让运动参量和操作者运动参量不能够相互一致,尤其避让运动参量超过操作者运动参量,则反向或尤其在时间上反转实施、尤其自动实施所存储的运动。这实现从该情况中的摆脱和/或尤其因此尤其所确定的顶端位置尤其通过其他路径的到达。
25、在本发明的一个改进方案中,该方法包括或具有如下步骤:借助于尤其自动平滑和/或平整真实形状的过渡对障碍物、尤其具有分配桅杆的尤其所述建筑材料和/或稠料泵装置的剩余部进行建模、尤其自动建模,其具有大于障碍物的真实或实际的形状的形状。步骤a)具有:确定尤其至少针对桅杆顶端的关于经建模的障碍物的间距参量中的至少一个、尤其全部间距参量。这实现避让运动参量和操作者运动参量相互的不一致性的避免。尤其,建模可以具有侧翼和/或斜坡的引入。附加地或备选地,过渡的平滑和/或平整可以具有、尤其是棱边和/或拐角的倒圆。
26、在本发明的一个改进方案中,分配桅杆包括或具有多个尤其可灵活调整的桅杆铰接部、尤其所述多个可调整的桅杆铰接部。尤其至少相同的顶端位置可以通过桅杆铰接部的不同的铰接位置组合来实现。尤其,桅杆铰接部有或具有不同的调整范围、尤其调整范围的不同的值。步骤c)具有:根据避让运动参量和操作者运动参量尤其以及在考虑调整范围的情况下来控制桅杆铰接部的运动。尤其,桅杆铰接部中的至少一个桅杆铰接部可以是弯折-、转动-和/或剪切铰接部。尤其,最后一个桅杆铰接部可以绕着竖直轴线转动。附加地或备选地,调整范围中的至少一个调整范围可以具有、尤其是角度范围。此外附加地或备选地,调整范围中的至少一个调整范围可以通过桅杆铰接部中的至少一个桅杆铰接部的至少一个尤其机械的止挡部来限定、尤其限制。此外附加地或备选地,建筑材料和/或稠料泵装置、尤其分配桅杆可以具有多个用于运动或调整桅杆铰接部或用于改变或设定尤其可变的铰接位置组合的铰接驱动装置。此外附加地或备选地,桅杆铰接部中的一个桅杆铰接部可以在分配桅杆的非自由的或固定的端部或桅杆座处。此外附加地或备选地,分配桅杆可以借助于桅杆铰接部来滚动折叠和/或z形折叠、尤其滚动-z形折叠。
27、在本发明的一个改进方案、尤其设计方案中,步骤c)具有:借助于尤其经加权和/或模块化的逆运动学来控制运动。在此,避让运动参量和操作者运动参量是输入参量。这实现尤其同时随着分配桅杆的运动或行进分配桅杆对至少所述障碍物的避让,尤其以到达尤其所确定的顶端位置。换句话说:这实现尤其所命令的行进指令的同时实现和接触的避免。再换句话说:这实现接触的避免或碰撞避免到行进指令尤其通过操作者的实现中的嵌入。尤其,桅杆顶端可以称为末端执行器(英文:tool center point(工具中心点),缩写:tcp)。附加地或备选地,概念“逆运动学”或概念“反向变换”可以同义地用于概念“逆向运动学”。此外附加地或备选地,逆运动学可以考虑、尤其具有调整范围。此外附加地或备选地,桅杆构件、尤其桅杆铰接部的速度、尤其转动速度或铰接速度可以是输出参量。此外附加地或备选地,输出参量可以尤其自动确定、尤其搜索和/或计算。
28、尤其,障碍物、尤其障碍物的至少一个值可以尤其通过操作者和/或建筑程序进行或被预设、尤其检测或测量。附加地或备选地,步骤a)可以具有:基于所预设、尤其检测到的障碍物和分配桅杆的实际桅杆位置来确定、尤其计算间距参量。尤其,实际桅杆位置可以借助于直接运动学进行或被尤其自动确定、尤其计算,尤其其中,桅杆构件的尤其瞬时或当前的实际位置组合、尤其实际位置组合的至少一个值可以是输入参量。尤其,桅杆铰接部的铰接角度可以是输入参量。
29、在本发明的一个改进方案中,步骤a)具有:尤其在运动期间或在或尤其同时随着运动无接触地检测或测量、尤其自动检测障碍物和/或间距参量。这实现接触的避免。尤其,检测可以借助于摄像机和/或光雷达(lidar,针对英文light detection and ranging(光探测和测距)的缩写)、尤其激光雷达(ladar,针对英文laser detection and ranging(激光探测和测距)的缩写)进行。
30、根据本发明的、尤其自动的方法构造或配置或设置用于借助于尤其所述建筑材料和/或稠料泵装置来尤其自动分配建筑材料和/或稠料。建筑材料和/或稠料泵装置具有尤其所述可调整的分配桅杆。分配桅杆包括或具有用于输送或输运建筑材料和/或稠料的尤其可灵活调整的输送线路。该方法包括或具有如前面提到的或描述的用于控制分配桅杆的尤其所述运动的尤其所述方法。该方法包括或具有如下步骤:尤其借助于或通过输送线路在运动或步骤c)期间或在运动或步骤c)时或尤其同时随着运动和步骤c)输送、尤其自动输送建筑材料和/或稠料。这、尤其在运动期间的输送,实现分配。尤其,输送线路可以具有、尤其是管路。附加地或备选地,输送线路可以具有末端软管。
31、根据本发明的系统构造或配置用于、尤其用于控制尤其所述可调整的分配桅杆的尤其所述运动。分配桅杆具有多个可调整的、尤其所述多个可调整的桅杆构件。分配桅杆的尤其所述桅杆顶端的至少一个相同的、尤其所述相同的顶端位置可以通过桅杆构件的不同的、尤其所述不同的位置组合来实现。该系统包括或具有确定和控制设备。确定和控制设备构造或配置用于、尤其用于确定尤其针对分配桅杆的多个、尤其所述多个桅杆元件关于针对桅杆元件的至少一个、尤其所述障碍物的尤其所述矢量性间距参量。确定和控制设备构造或配置用于、尤其用于基于所确定的间距参量来确定针对桅杆构件中的多个、尤其所述多个桅杆构件的尤其所述矢量性避让运动参量。确定和控制设备构造或配置用于、尤其用于根据所确定的避让运动参量和确定尤其所述顶端位置的尤其所述矢量性操作者运动参量来控制运动。该系统可以实现与前面提到的或描述的一个或多个方法相同的优点。尤其,该系统、尤其确定和控制设备可以构造或配置用于尤其自动实施尤其所述前面提到的方法/尤其所述前面提到的多个方法中的一个方法。附加地或备选地,系统可具有分配桅杆,尤其建筑材料和/或稠料泵装置。此外附加地或备选地,确定和控制设备可以是电气的、液压的和/或气动的。尤其,确定和控制设备可以具有计算单元、尤其处理器和/或存储单元。
- 还没有人留言评论。精彩留言会获得点赞!