一种钻孔劈裂机构驱动方法与流程
本申请涉及工程施工和矿山开采的,具体涉及一种钻孔劈裂机构驱动方法。
背景技术:
1、在工程施工和矿山开采中,通过圆盘锯切割石材后,还需要将大长条形的石材分割成小块运输。目前多采用工人在同一直线上钻多个孔再人工劈裂的方式进行。这种方式存在劳动强度大、效率、人工凿岩深度浅、劈裂后岩石表面不平整等缺点。且现有的钻孔机构和劈裂机构需要人工进行对位,自动化程度不高,不方便在复杂的矿山环境下使用。本发明旨在研究一种钻孔劈裂机构驱动方法,驱动钻孔劈裂机构自动钻孔、换位和劈裂,从而提高钻孔劈裂的工作效率。
技术实现思路
1、鉴于上述问题,需要提供一种钻孔劈裂机构驱动方法,用以解决现有技术存在的劈裂机构需要人工对准、钻孔劈裂效率低的问题。
2、为实现上述目的,本申请提供了一种钻孔劈裂机构,包括:
3、提供一种钻孔劈裂机构,所述钻孔劈裂机构包括钻孔机构、劈裂机构和伸缩机构,所述钻孔劈裂机构驱动方法按照以下步骤进行:
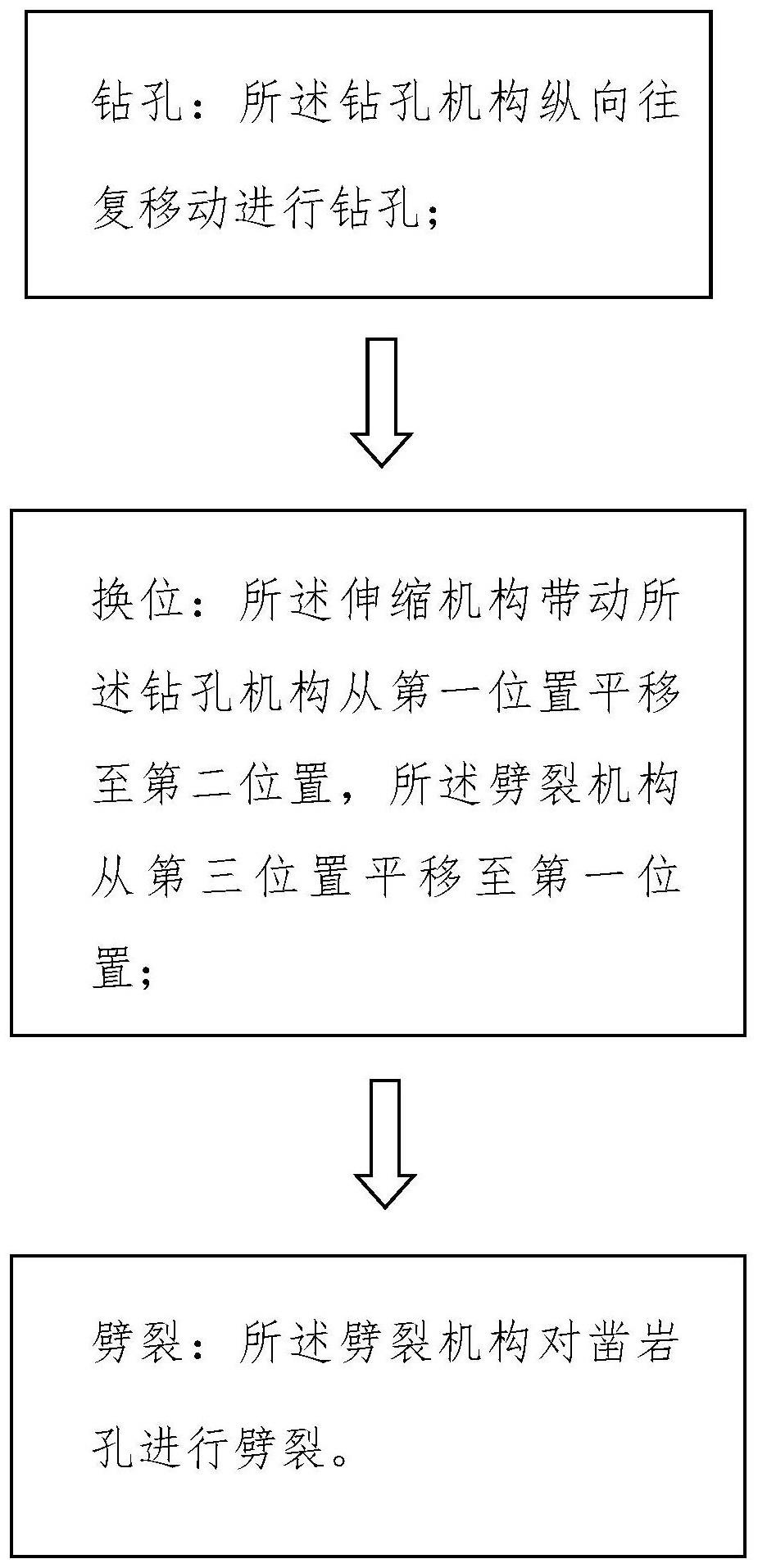
4、钻孔:所述钻孔机构纵向往复移动进行钻孔;
5、换位:所述伸缩机构带动所述钻孔机构从第一位置平移至第二位置,所述劈裂机构从第三位置平移至第一位置;
6、劈裂:所述劈裂机构对凿岩孔进行劈裂。
7、区别于现有技术,上述技术方案通过钻孔机构进行钻孔,驱动伸缩机构带动劈裂机构和钻孔机构移动,劈裂机构自动对准插入凿岩孔内,无需人工将劈裂机构对准凿岩孔,有效提高了施工效率和自动化程度,避免了工人和机器共同作业的安全隐患,方便在复杂的矿山环境下使用。
8、在一些实施例中,所述换位步骤具体包括以下步骤:
9、所述伸缩机构伸出带动所述钻孔机构和所述劈裂机构向前移动;
10、所述劈裂机构和钻孔机构移动至预设位置,所述劈裂机构位于原来钻孔机构的位置。
11、在一些实施例中,所述钻孔机构包括凿岩机、纵移组件和横移组件,所述钻孔步骤包括:
12、步骤1:所述纵移组件自上而下移动,带动所述凿岩机钻孔;
13、步骤2:所述凿岩机完成钻孔后,所述纵移组件向上移动,带动所述凿岩机向上移动至初始位置;
14、步骤3:所述横移组件带动所述凿岩机横向移动一定距离;
15、步骤4:顺次完成所述步骤1、步骤2和步骤3;
16、步骤5:重复完成步骤4,在同一直线上形成多个凿岩孔。
17、在一些实施例中,所述步骤3中所述钻孔机构每次横向移动的位移相等。
18、在一些实施例中,所述劈裂机构包括多个劈裂器,所述劈裂器沿劈裂架间距设置,相邻劈裂器之间的间距与所述钻孔机构每次横向移动的位移相等。
19、在一些实施例中,所述横移组件包括横移导轨、位移传感器、逻辑控制器、电磁阀组和动力装置;所述步骤3中具体包括以下步骤:
20、所述位移传感器采集所述凿岩机横向移动的实时位移数据,并将位移数据发送到逻辑控制器;
21、所述逻辑控制器发送信号给电磁阀组;
22、所述电磁阀组接收到逻辑控制器发出的信号并控制所述动力装置动作;
23、所述动力装置驱动所述凿岩机在所述横移导轨上横向移动,控制所述凿岩机在横移导轨上的位置;
24、所述位移传感器组件持续收集所述凿岩机的横向位移数据。
25、在一些实施例中,在完成步骤5的工作后对凿岩孔进行检查:
26、如同一直线上的凿岩孔个数等于预设数量,则完成所述钻孔机构一次推进行程量的钻孔工作;
27、如同一直线上的凿岩孔个数小于预设数量,仍存在遗漏区域而未能完成所述钻孔机构一次推进行程量的钻孔工作,则按步骤1、步骤2和步骤3的组合,通过一个或若干个凿岩孔对遗漏区域进行补充行程量的钻孔工作。
28、在一些实施例中,所述劈裂步骤包括:
29、劈裂器对准凿岩孔,向下移动至预设位置;
30、驱动劈裂器进行劈裂;
31、劈裂完成后,劈裂器向上移动回到初始位置。
32、在一些实施例中,所述钻孔劈裂机构在地面进行钻孔和劈裂。
33、在一些实施例中,所述钻孔劈裂机构还包括逻辑控制器、电磁阀组、倾角传感器和俯仰油缸,所述俯仰油缸与所述劈裂机构连接;所述驱动方法还包括以下步骤:
34、所述倾角传感器采集所述钻孔劈裂机构实时的倾斜数据,并将倾斜数据发送到逻辑控制器;
35、所述逻辑控制器发送信号给电磁阀组;
36、所述电磁阀组接收到逻辑控制器发出的信号并控制所述俯仰油缸动作;
37、所述倾角传感器持续收集所述钻孔劈裂机构的倾斜数据,以维持操作钻孔劈裂机构平衡。
38、上述
技术实现要素:
相关记载仅是本申请技术方案的概述,为了让本领域普通技术人员能够更清楚地了解本申请的技术方案,进而可以依据说明书的文字及附图记载的内容予以实施,并且为了让本申请的上述目的及其它目的、特征和优点能够更易于理解,以下结合本申请的具体实施方式及附图进行说明。
技术特征:
1.一种钻孔劈裂机构驱动方法,其特征在于,包括:
2.根据权利要求1所述的钻孔劈裂机构驱动方法,其特征在于,所述换位步骤具体包括以下步骤:
3.根据权利要求1所述的钻孔劈裂机构驱动方法,其特征在于,所述钻孔机构包括凿岩机、纵移组件和横移组件,所述钻孔步骤包括:
4.根据权利要求3所述的钻孔劈裂机构驱动方法,其特征在于,所述步骤3中所述钻孔机构每次横向移动的位移相等。
5.根据权利要求4所述的钻孔劈裂机构驱动方法,其特征在于,所述劈裂机构包括多个劈裂器,所述劈裂器沿劈裂架间距设置,相邻劈裂器之间的间距与所述钻孔机构每次横向移动的位移相等。
6.根据权利要求5所述的钻孔劈裂机构驱动方法,其特征在于,所述横移组件包括横移导轨、位移传感器、逻辑控制器、电磁阀组和动力装置;所述步骤3中具体包括以下步骤:
7.根据权利要求6所述的钻孔劈裂机构驱动方法,其特征在于,在完成步骤5的工作后对凿岩孔进行检查:
8.根据权利要求1所述的钻孔劈裂机构驱动方法,其特征在于,所述劈裂步骤包括:
9.根据权利要求1所述的钻孔劈裂机构驱动方法,其特征在于,所述钻孔劈裂机构在地面进行钻孔和劈裂。
10.根据权利要求1所述的钻孔劈裂机构驱动方法,其特征在于,所述钻孔劈裂机构还包括逻辑控制器、电磁阀组、倾角传感器和俯仰油缸,所述俯仰油缸与所述劈裂机构连接;所述驱动方法还包括以下步骤:
技术总结
本申请提供了一种钻孔劈裂机构驱动方法,具体涉及工程施工和矿山开采的技术领域。钻孔劈裂机构驱动方法按照以下步骤进行:所述钻孔机构纵向往复移动进行钻孔;换所述伸缩机构带动所述钻孔机构从第一位置平移至第二位置,所述劈裂机构从第三位置平移至第一位置;所述劈裂机构对凿岩孔进行劈裂。区别于现有技术,上述技术方案通过钻孔机构进行钻孔,驱动伸缩机构带动劈裂机构和钻孔机构移动,劈裂机构自动对准插入凿岩孔内,无需人工将劈裂机构对准凿岩孔,有效提高了施工效率和自动化程度,避免了工人和机器共同作业的安全隐患,方便在复杂的矿山环境下使用。
技术研发人员:林孝狮,蔡俊杰,黄田玉,黄承馨,江春水,邓鹏标,佘昕,邓诗婷,陈宇辉,戴新建,黄志峰
受保护的技术使用者:福建天石源设备科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!