一种自动排砖贴砖机器人及方法与流程
本发明涉及建筑工程的,具体涉及一种自动排砖贴砖机器人,同时还涉及一种自动排砖贴砖方法。
背景技术:
1、通常的瓷砖铺贴是先在地面或墙面上涂抹薄层水泥砂浆,然后将瓷砖按需排列并压入砂浆中,最后用缝隙填充剂填充缝隙,砂浆和缝隙填充剂提供了持久的保护,能够防止水、污渍和损坏,同时,铺贴的瓷砖也提供了很强的地面稳定性,可以承受较大的重量压力。
2、而在现有瓷砖铺贴过程中,人工操作不当可能导致一些缺陷和效率低下的情况,如:由于人工施工时没有正确测量、标记和放置瓷砖所导致的接缝不对称或不平整;由于砂浆在地面或墙面上涂抹得不均匀,将会导致瓷砖不稳定,并且在未来可能会出现空鼓;由于缝隙填充剂的数量不足或过多,都会导致瓷砖表面的不平整和不美观;人工铺贴瓷砖需要耗费较大的时间和精力,并且容易出现错误,从而导致效率低下和额外的成本费用;人工铺贴瓷砖可能存在安全隐患,例如在高处施工时,工人可能会失足跌落等问题。
3、因此需要一种可以自动排砖贴砖的机器人及施工方法。
技术实现思路
1、基于上述现有技术存在的不足,本发明的目的在于提供一种自动排砖贴砖机器人,使得瓷砖铺贴施工中的各流程如测量定位、边界线安装、砂浆搅拌、砂浆喷涂、砂浆刮平、瓷砖切割、瓷砖安装、填缝、填缝刮平均可通过一个机器完成,大幅节省人力物力,提高效率及铺贴瓷砖成品质量。
2、本发明的另一个目的在于提供了一种自动排砖贴砖方法,可直接应用在现有瓷砖铺贴施工中,通过将瓷砖铺贴的各流程高度集成在一台机器人上,使得施工更为紧凑高效,有效避免因人工施工造成的不可避免误差。
3、为了实现上述的目的,本发明采用以下技术方案:
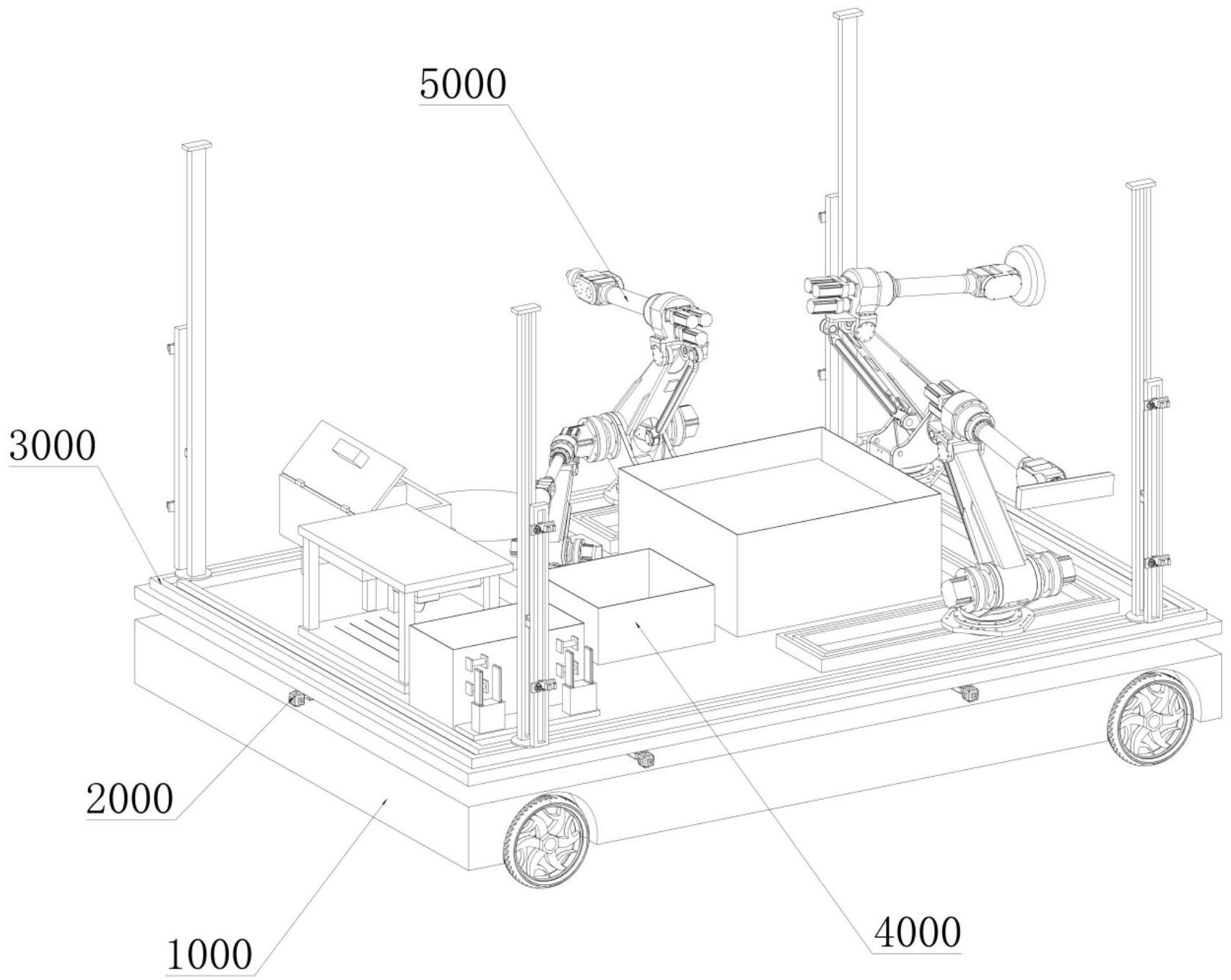
4、本发明的自动排砖贴砖机器人,包括:主机体部分,作为整个机器人的底座;测量定位部分,安装于所述主机体部分上,其由安装于所述主机体部分四周的扫描定位环形轨道构成主体,所述扫描定位环形轨道上安装有若干扫描定位单元,所述扫描定位单元从后往前依次由电动小车、旋转电机、第一电动推杆、激光测距仪安装座连接构成,所述激光测距仪安装座为正方体结构,其除开与第一电动推杆连接的一面其余五面均按设有激光测距仪;边界线安装部分,安装于所述主机体部分的上端外围,其由安装于所述主机体部分上端外围的边界线环形轨道构成主体,所述边界线环形轨道上通过电动小车安设有若干组边界线安装单元,用于进行地面、墙面边界线的安装;加工存储部分,安装于所述主机体部分上,其包括安装于所述主机体部分的机体上表面上的瓷砖存储箱、切割后瓷砖存储箱、小型瓷砖转运机械臂、瓷砖切割机、尼龙线卷存储箱、原料存储箱、砂浆搅拌箱,用于将边界线存储、瓷砖存储、瓷砖转运、瓷砖切割、砂浆搅合、填缝剂搅合全部集成在机体上表面上,使得各工序之间实现迅速衔接;施工部分,安装于所述主机体部分上,其由安装于机体上表面上右侧的凹型轨道构成主体,所述凹型轨道上通过电动小车安设有砂浆喷涂机械臂、瓷砖安装机械臂、刮平机械臂,用于进行砂浆喷涂、砂浆刮平、瓷砖安装、填缝、填缝刮平工序。
5、优选的,所述边界线安装单元由安装于电动小车上的第一竖向轨道安装座作为底盘,所述第一竖向轨道安装座上安设有第一竖向轨道,所述第一竖向轨道上通过电动小车安装有第二电动推杆,所述第二电动推杆的输出端连接有第二竖向轨道,所述第二竖向轨道上通过电动小车安装有两个尼龙线铺设机构安装座,所述尼龙线铺设机构安装座的左右两端上分别设有电动涂胶枪与微型电动夹爪。
6、进一步的,所述瓷砖存储箱安装于小型瓷砖转运机械臂的右侧,所述切割后瓷砖存储箱安装于小型瓷砖转运机械臂的前侧,所述瓷砖切割机安装于小型瓷砖转运机械臂的左侧,所述砂浆搅拌箱安装于小型瓷砖转运机械臂的后侧,所述尼龙线卷存储箱安装于瓷砖切割机的前侧,所述原料存储箱安装于砂浆搅拌箱的左侧;所述瓷砖存储箱中存放有待安装的若干瓷砖;所述尼龙线卷存储箱朝向边界线环形轨道的外侧表面设有若干尼龙线卷安装座,尼龙线卷安装于其上转动进而放出尼龙线,所述尼龙线卷安装座前侧的尼龙线输出端处设有竖向的电动剪线钳。
7、进一步的,所述原料存储箱的右侧底端设有电动阀门,其输出方向朝向砂浆搅拌箱的进料口,所述砂浆搅拌箱的出料口与砂浆泵机相连,该砂浆泵机将搅拌后的砂浆泵入砂浆喷头进行砂浆涂抹工作;所述小型瓷砖转运机械臂的输出端连接有第一电动真空吸盘。
8、优选的,所述砂浆喷涂机械臂的输出端连接有砂浆喷头,所述瓷砖安装机械臂的输出端连接有第二电动真空吸盘,所述刮平机械臂的输出端连接有合金刮板。
9、相应的,本发明还提供了一种自动排砖贴砖方法,其步骤为:
10、s1、测量定位:当需要进行测量定位工序的时候,当扫描地面施工环境数据时,通过扫描定位环形轨道上的若干组扫描定位单元对地面进行扫描检测,先通过第一电动推杆推出整个扫描定位单元至环形开槽的外侧,通过其激光测距仪安装座两侧与正面的激光测距仪对地面面积进行扫描记录;当扫描墙面施工环境数据时,通过激光测距仪安装座上下与左右侧的激光测距仪对墙面面积进行扫描记录,正面的激光测距仪则用于监测机器人与墙面的距离;当遇到倾角或者激光测距仪无法正对墙面的情况时,通过其电动小车上的旋转电机控制第一电动推杆进行旋转,进而带动其上的激光测距仪安装座旋转,进而调整其上各激光测距仪的角度以适应环境需要;当对需要施工的地面或墙面完成扫描后即可由施工人员确定施工所需瓷砖、砂浆、填缝剂等材料的种类数目,进而提前装入机器人中准备进行下一步施工;
11、s2、材料准备:当完成了检测扫描工序后,需要进行材料准备工序,施工人员按照扫描计算后的材料需要将瓷砖放入瓷砖存储箱中,将存放于尼龙线卷存储箱中的尼龙线卷安装于尼龙线卷安装座上,并将砂浆搅拌配比需要的材料放入原料存储箱中,如因地面、墙面而需要切割瓷砖的情况,通过控制小型瓷砖转运机械臂通过第一电动真空吸盘吸取瓷砖存储箱中的瓷砖并放至瓷砖切割机中进行切割,待切割完毕后取出并将切割后的瓷砖放入切割后瓷砖存储箱中;
12、s3、边界线安装:当需要进行边界线安装工序的时候,将边界线安装单元移动至边界线环形轨道靠近尼龙线卷存储箱的一侧,控制第一竖向轨道安装座底部的电动小车上的旋转电机运行使整个边界线安装单元转向,直至方向朝向尼龙线卷存储箱的一侧,此时通过第一竖向轨道上的电动小车降下第二电动推杆至合适高度,第二电动推杆推出,配合第二竖向轨道上的电动小车移动至合适高度,使得尼龙线铺设机构安装座上的微型电动夹爪能够靠近尼龙线卷安装座上尼龙线的线头,通过微型电动夹爪夹取线头并使上述各机构配合运行,并使第二个尼龙线铺设机构安装座上的微型电动夹爪能够靠近尼龙线卷安装座上尼龙线的线头,通过该微型电动夹爪夹取线头的另一端,此时整个边界线安装单元上的两个微型电动夹爪已夹取适用于安装一条边界线长度的尼龙线,此时通过电动剪线钳剪断末端的尼龙线,此时边界线安装单元与加工存储部分彻底断开,在边界线环形轨道上移动至需要安装边界线的位置进行边界线安装;当安装地面的边界线时,此时将边界线安装单元移动至靠近地面一侧边界处,控制第一竖向轨道上的电动小车降下第二电动推杆,通过第二电动推杆同步推出第二竖向轨道,使得第二竖向轨道的下端靠近地面,通过其上的电动小车降下一个尼龙线铺设机构安装座靠近边界线安装位置,先通过电动涂胶枪对墙面进行胶喷涂,再通过该电动小车上的旋转电机旋转整个安装座,使电动涂胶枪与微型电动夹爪的位置调换,此时通过微型电动夹爪将尼龙线线头埋入胶体中进行固定,待固定后移动整个边界线安装单元至地面边界另一侧,通过同样方式降下另一个尼龙线铺设机构安装座并进行涂胶、埋线,完成一条地面边界线铺设;当进行墙面尼龙线铺设时,大体方式与地面相同,但当需要横向铺设时,通过第一竖向轨道的电动小车上的旋转电机旋转整个第二竖向轨道使之横向与墙面成水平,进而完成墙面横向边界线铺设;
13、s4、铺贴施工:当完成边界线安装工序后,即可进行砂浆喷涂、砂浆刮平、瓷砖安装、填缝、填缝刮平工序,此时先打开电动阀门使原料存储箱对砂浆搅拌箱进行下料,砂浆搅拌箱搅拌后输出砂浆至砂浆泵机中,砂浆泵机通过管道将砂浆输送给砂浆喷头,砂浆喷头通过砂浆喷涂机械臂在边界线划定位置进行砂浆喷涂工序,喷涂完成后移动砂浆喷涂机械臂至下一处进行喷涂,同步移动刮平机械臂至此处进行砂浆刮平工序,完毕后刮平机械臂移至下一处继续进行刮平工序,此时移动瓷砖安装机械臂至此处,通过其上第二电动真空吸盘吸取瓷砖存储箱中的瓷砖进行压实安装,如需要切割后的瓷砖安装,则配合小型瓷砖转运机械臂将切割后瓷砖存储箱中的瓷砖移至瓷砖存储箱中供瓷砖安装机械臂安装,待该区域所有瓷砖安设完毕后,通过原料存储箱上的电动阀门打开对砂浆搅拌箱供给填缝剂原料,进行填缝剂搅拌,此处填缝剂原料存储的箱体可另设单独箱体进行存储,填缝剂搅拌完成后再通过砂浆喷头进行输出,通过砂浆喷涂机械臂进行整体填缝工序,填缝完毕后再通过刮平机械臂的合金刮板进行整体填缝刮平,全部刮平结束后通过测量定位部分进行扫描复验,确定符合要求后结束,完成整个自动排砖贴砖施工。
14、由上,本发明的自动排砖贴砖机器人及方法的有益效果如下:
15、1、相较于现有技术,本发明设计在主机体上的环形开槽可用于安设扫描定位环形轨道,而该轨道上可以安装若干扫描定位单元,该扫描定位单元在不使用时可以通过第一电动推杆收入主机体中进行隐藏,不影响其他工序,当需要进行扫描定位的时候,第一电动推杆将扫描定位单元推出,其激光测距仪安装座上五面的激光测距仪即可对需要扫描区域进行全方位扫描记录,而碰到倾角或地面不平等情况也可直接通过电动小车上的旋转电机调整整个扫描定位单元角度,进而适应更大范围的施工场景,当进行扫描时,扫描定位单元可在环形轨道上移动扫描,即可通过单个单元进行移动扫描,也可增设多个单元进行多面同步扫描、复验,大幅提高扫描效率及准确性,当装置在进行铺贴等工序时,也可利用该扫描定位单元进行定位工作、复验工作,实时监测施工进度及质量。
16、2、本发明通过设置于边界线环形轨道上的若干边界线安装单元,可通过其上第一竖向轨道、第二电动推杆、第二竖向轨道、微型电动夹爪、电动涂胶枪的配合实现在尼龙线卷存储箱处的尼龙线自动取用、断开,而后可自动进行地面、墙面边界线的安装,安装过程全由机械结构完成,大幅节省人力成本并提高安装准确性,同时竖向安装与地面安装均可胜任,有效避免因人工施工高度过高造成的安全隐患,而边界线环形轨道上又可同时安装多组边界线安装单元进行多面同步安装,进而有效提高施工效率。
17、3、本发明通过将边界线存储、瓷砖存储、瓷砖转运、瓷砖切割、砂浆搅合、填缝剂搅合全部集成在机体上表面上,使得各工序之间能够快捷的实现迅速衔接,确保质量的同时提高铺设效率,同时如果是对多户同类型的地面、墙面进行瓷砖铺贴时,只需第一次人工计算所需材料、施工规划,后续只需放入足量原料于机器人加工存储部分中即可自动对多户进行瓷砖铺贴工作,大幅提高施工效率节省人力成本。
18、4、本发明通过设计在机体上表面右侧的凹型轨道高效的将砂浆涂抹、刮平、瓷砖安装、填缝、填缝刮平工序整合在了三个机械臂上,而三个机械臂可通过该轨道进行循环施工,大幅提高施工效率,因该结构设计在机体正面,故正好匹配安装瓷砖时机体始终不进入瓷砖未安装区域的要求,使得机体始终在安装完毕的瓷砖上进行移动施工,有效提高瓷砖安装质量,而该凹型轨道将加工存储部分的部分结构囊括于其中,通过小型瓷砖转运机械臂作为中间调和,有效的让各材料与各施工机械有效配合,提高工效。
- 还没有人留言评论。精彩留言会获得点赞!