一种轮腿式钢筋捆扎机器人移动底盘的制作方法
本发明涉及一种轮腿式钢筋捆扎机器人移动底盘。
背景技术:
1、随着国内外基础建设的不断发展,各种建筑层出不穷。目前,钢筋混凝土结构是主要的建筑框架,即通过钢筋架设框架,再填充混凝土定型。其中,钢筋节点的绑扎是比较繁琐重复的问题,因为钢筋节点的数量极其庞大,人工捆扎时非常费时费力。
2、目前传统的捆扎方式主要采用人工手动捆扎和人工捆扎枪绑扎。其中,人工手动捆扎工作量非常大,效率也很低下;而捆扎枪能够自动完成钢筋绑扎的过程,包括吐丝、打结、切丝,虽然其绑扎过程简单,效率有所提高,但是在绑扎时依然需要工人单人单点地进行捆扎,需要工人反复进行弯腰起蹲操作,任务繁重、危险性强、损伤性大,效率也不太理想,并且人员流动频繁,在户外复杂工况下,捆扎难度较高。
3、为了解决上述问题,现有技术中开始采用机器人自主捆扎的方式,即通过机器人智能检测、移动并自主捆扎,但现有技术中采用的履带式机器人、行走式机器人、龙门架结构式机器人等结构,存在运动时稳定性不足,重量较大容易压弯钢筋,行走时移动速度太慢、效率低下,以及体积庞大、不易拆装,应用场景受限等问题。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中钢筋绑扎机器人的移动装置体积庞大、移动不便等缺陷,提供一种轮腿式钢筋捆扎机器人移动底盘。
2、本发明是通过下述技术方案来解决上述技术问题:
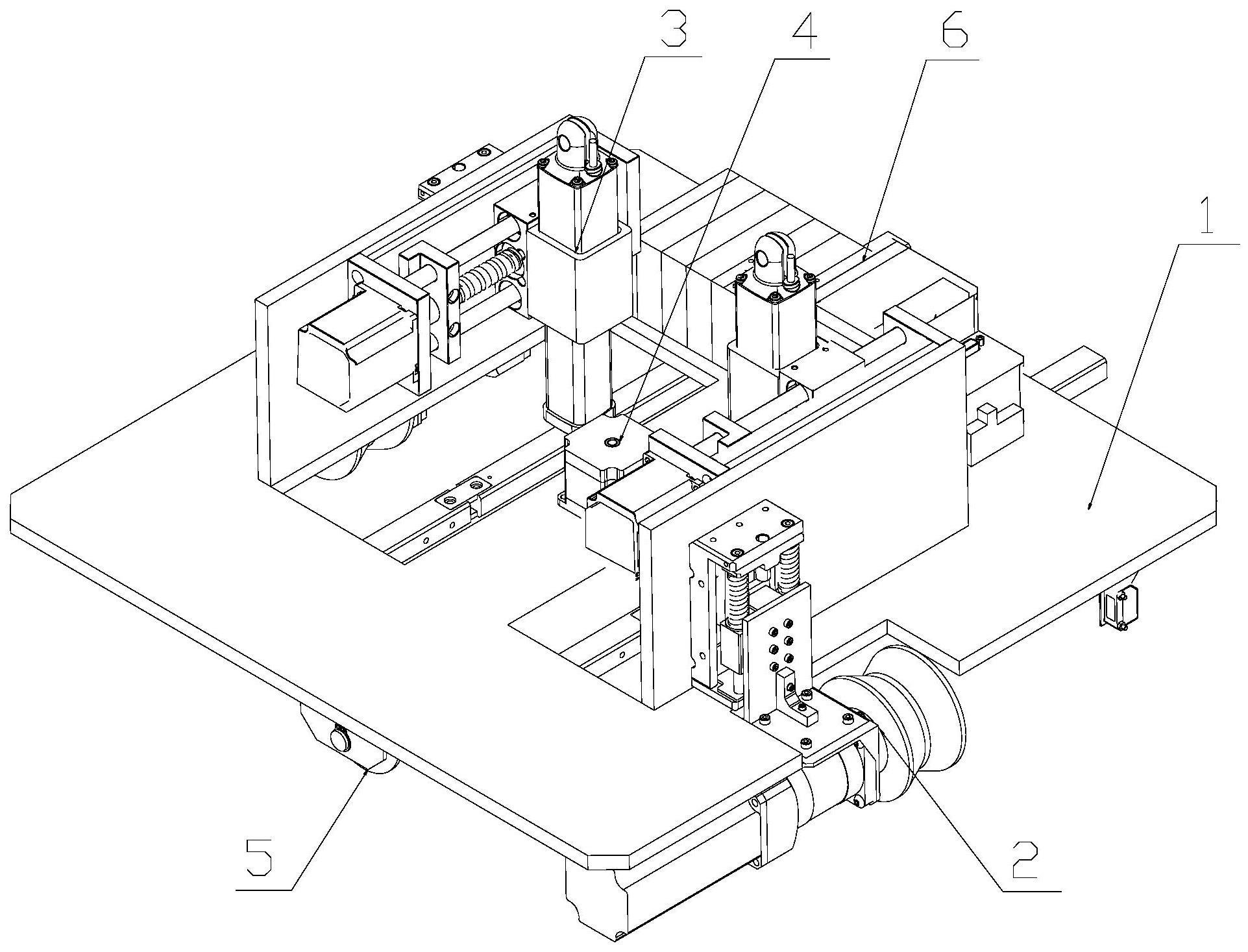
3、一种轮腿式钢筋捆扎机器人移动底盘,所述一种轮腿式钢筋捆扎机器人移动底盘用于钢筋绑扎机器人,所述一种轮腿式钢筋捆扎机器人移动底盘包括:安装盘、滚轮机构以及撑腿机构,所述安装盘的中心区域开设有开口,所述开口的侧面设置有连接板,所述连接板沿竖直方向设置在所述安装盘的上方;所述滚轮机构设置在所述安装盘的底面,所述滚轮机构包括多个主动轮,所述主动轮沿第一方向设置在所述安装盘的边缘区域,以带动所述一种轮腿式钢筋捆扎机器人移动底盘沿第一方向移动;所述撑腿机构包括移动件和支撑件,所述移动件的一端连接在所述连接板上,以使所述移动件相对于所述安装盘沿第二方向和高度方向移动,所述移动件的另一端通过所述开口向所述安装盘的底部延伸,所述移动件的底端连接于所述支撑件,所述支撑件沿第二方向设置;所述第一方向和所述第二方向均平行于水平方向并相互垂直。
4、在本方案中,采用上述结构形式,将滚轮机构设置在安装盘的边缘区域,将撑腿机构设置在安装盘的中心区域的开口处,从而将滚轮机构与撑腿机构整合在一起,使得该一种轮腿式钢筋捆扎机器人移动底盘的结构简单、紧凑,整体体积小巧,从而实现了该一种轮腿式钢筋捆扎机器人移动底盘的轻量化;并且由于滚轮和撑腿的配合设置,通过滚轮机构实现该一种轮腿式钢筋捆扎机器人移动底盘在第一方向上的移动,通过撑腿机构实现该一种轮腿式钢筋捆扎机器人移动底盘在第二方向上的侧移,使得该一种轮腿式钢筋捆扎机器人移动底盘的移动、换向和侧移都很方便,有效提高了该一种轮腿式钢筋捆扎机器人移动底盘的便利性、机动性。
5、较佳地,所述滚轮机构包括辅助轮,所述辅助轮设置在所述安装盘沿第二方向的边缘区域。
6、在本方案中,采用上述结构形式,使得辅助轮对安装盘的第二方向上的边缘起到支撑作用,保证了该一种轮腿式钢筋捆扎机器人移动底盘在移动过程中的稳定性,从而保证了钢筋绑扎机器人工作时的安全性。
7、较佳地,所述辅助轮至少为两个,并沿第二方向活动设置在所述安装盘的两侧,以使所述辅助轮相对于所述安装盘沿第二方向左右移动。
8、在本方案中,采用上述结构形式,使得两侧的辅助轮在支撑安装盘,提升稳定性的同时,还可以实现轮间距的调整,从而使得该一种轮腿式钢筋捆扎机器人移动底盘适用于不同宽度的钢筋网面,有效扩大了该一种轮腿式钢筋捆扎机器人移动底盘的适用范围,并且辅助轮的结构简单,调节方便。
9、较佳地,所述滚轮机构包括电机、齿轮和至少两个齿条,所述电机设置在所述安装盘上,所述电机的输出端向所述安装盘的底部延伸并连接于所述齿轮,两个所述齿条沿第二方向设置,并对称连接于所述齿轮的两侧,两个所述齿条远离所述的齿轮的一端分别连接于所述辅助轮。
10、在本方案中,采用上述结构形式,使得两个辅助轮通过电机驱动齿轮转动,并带动齿条移动,从而调节轮间距,该结构简单、紧凑、轻便且有效,轮间距的调节过程效率高、精度高,不需要人工操作,有效提高了该一种轮腿式钢筋捆扎机器人移动底盘工作过程中的便利性。
11、较佳地,所述齿条包括第一齿条和第二齿条,所述一种轮腿式钢筋捆扎机器人移动底盘包括两个滑槽和两个滑动轨道,两个所述滑槽分别沿第二方向设置,所述第一齿条和所述第二齿条分别卡设在两个滑槽中,并沿所述滑槽向所述安装盘的第二方向上的两侧滑动,两个所述滑动轨道分别沿第二方向设置,两个所述辅助轮分别卡设于所述滑动轨道,并沿所述滑动轨道滑动。
12、在本方案中,采用上述结构形式,使得两个齿条通过齿轮带动,在滑槽中进行滑动,而两个辅助轮通过齿条的带动,在滑动轨道中进行滑动,从而使得齿条和辅助轮的滑动轨迹固定,有效提高了调节轮间距过程的稳定性和安全性。
13、较佳地,所述齿条包括多个滚轮,所述滚轮分别设置在所述齿条远离所述齿轮的一侧,并抵设在所述滑槽的侧壁上,以使所述齿条通过所述滚轮在所述滑槽中滑动。
14、在本方案中,采用上述结构形式,使得齿条在滑槽中更顺滑、阻力更小,确保了齿条的滑动过程稳定,从而确保了轮间距的调整过程的稳定性。
15、较佳地,所述辅助轮包括固定支架和滑块,所述固定支架连接于所述齿条,所述滑块设置在所述固定支架的顶部,所述滑块与所述滑动轨道配合连接。
16、在本方案中,采用上述结构形式,使得齿条通过带动固定支架以调节辅助轮的位置,避免了齿条直接接触辅助轮,同时,通过设置滑块与滑动轨道连接,避免了辅助轮直接连接在滑动轨道中,从而避免了齿条和滑动轨道对辅助轮的滚动造成干扰,保证了辅助轮滚动时的稳定性和安全性。
17、较佳地,所述安装盘包括两个相互对称的所述开口和两个连接板,在第一方向上,所述连接板的一侧连接于所述开口靠近所述安装盘的外侧。
18、在本方案中,采用上述结构形式,使得两个撑腿机构对称地设置在两个开口位置,从而有效地将滚轮机构和撑腿机构整合到安装盘上,并且滚轮机构和撑腿机构之间不会产生相互干扰,使得该一种轮腿式钢筋捆扎机器人移动底盘的结构紧凑,同时也保证了该一种轮腿式钢筋捆扎机器人移动底盘运行过程中的稳定性和安全性。
19、较佳地,所述撑腿机构包括至少两个移动件和至少两个支撑件,所述移动件包括横向移动部和竖向移动部,所述横向移动部设置在所述连接板朝向所述开口的一侧,所述竖向移动部的一端设置在所述横向移动部上,另一端沿竖直方向向所述安装盘的底部延伸,并连接于所述支撑件。
20、在本方案中,采用上述结构形式,使得通过设置在连接板上的移动件即可实现将该一种轮腿式钢筋捆扎机器人移动底盘顶起,并在第二方向上进行侧移,该移动件结构简单、体积小巧、移动方便,进一步使得该一种轮腿式钢筋捆扎机器人移动底盘的结构紧凑、移动方便快捷。
21、较佳地,所述支撑件包括多条撑腿,多条所述撑腿可拆卸地依次连接。
22、在本方案中,采用上述结构形式,使得支撑件由多条撑腿连接而成,增加了支撑件的长度,保证了支撑件工作时的稳定性和安全性,同时也便于支撑件的安装和拆卸。
23、本发明的积极进步效果在于:
24、该一种轮腿式钢筋捆扎机器人移动底盘将滚轮机构设置在安装盘的边缘区域,将撑腿机构设置在安装盘的中心区域的开口处,从而将滚轮机构与撑腿机构整合在一起,使得该一种轮腿式钢筋捆扎机器人移动底盘的结构简单、紧凑,整体体积小巧,从而实现了该一种轮腿式钢筋捆扎机器人移动底盘的轻量化;并且由于滚轮和撑腿的配合设置,通过滚轮机构实现该一种轮腿式钢筋捆扎机器人移动底盘在第一方向上的移动,通过撑腿机构实现该一种轮腿式钢筋捆扎机器人移动底盘在第二方向上的侧移,使得该一种轮腿式钢筋捆扎机器人移动底盘的移动、换向和侧移都很方便,有效提高了该一种轮腿式钢筋捆扎机器人移动底盘的便利性、机动性。
- 还没有人留言评论。精彩留言会获得点赞!