一种超大面积自流平一体式自动化高效刮涂方法及系统与流程
本发明属于建筑施工,更具体地,涉及一种超大面积自流平一体式自动化高效刮涂方法及系统。
背景技术:
1、当前,随着建筑技术的发展,地下室地坪漆施工依旧通过人工采用刮涂板的形式进行施工,由于作业人员技术水平参差不齐,刮涂厚度不均,从而导致整体地坪面平整度难以控制;而对于地坪基层打磨不够平整的情况下,地坪漆刮涂是使地坪面达到平整的关键因素,若不平整则会因为凹凸不平容易导致积水而使地坪漆使用寿命缩短。传统方法存在弊端或无法满足施工需求,因此地下室大面积地坪漆施工厚度控制是施工领域一大亟待解决的难题。
2、中国专利cn211303464u公开了一种便于使用的地坪漆喷涂装置,其底座能够拥有固定和移动两个工作模式,避免了该装置只采取一端用轮支撑,一端用支撑架支撑,造成工作时无法快速的进行移动,要通过扶手的抬起动作才能进行移动,提高了工作效率。但该装置无刮涂装置且自动化程度低。中国专利cn211989338u公开了一种地坪漆自动刮涂机,其通过在传动盘上端中部的两侧均设置储漆罐,且传动盘底端的两侧固定连接有位于主刮刀头两侧的水平度传感器,当该设备应用于地坪漆刮平时,当发生因为工作人员疏忽而使地坪的一块区域没有喷涂适量的地坪漆,导致该处地坪出现凹陷而无法进行平整时,此时水平度传感器对地坪漆凹陷进行测量评估,控制储漆罐对凹陷区域进行定量补漆,从而代替了人工手动补漆,不仅节约了补漆时间,而且避免了人为控制不准地坪漆量的事情发生。但该装置无法实现地坪漆快速干化和多余材料回收利用,无环保功能。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种超大面积自流平一体式自动化高效刮涂方法及系统,根据待刮涂区域形貌进行刮涂施工路径规划;agv运动模块按照规划的刮涂施工路径进行运动,同时获取沿路径运动过程中地表的激光雷达数据,对激光雷达数据以计算喷涂量;根据计算的喷涂量向待刮涂区域喷涂指定地坪漆;将所述喷涂模块喷涂的地坪漆刮平,刮平过程中,若地坪漆余量大于阈值范围的最大值,则根据地坪漆余量计算地坪漆的吸取值,并根据该吸取值吸取地坪漆,若地坪漆余量小于阈值范围的最小值,则根据地坪漆余量计算地坪漆的补给值,并根据该补给值补给地坪漆;对刮平处理后的地坪漆进行烘干处理。以此方式,可根据作业工具特点,对待刮涂区域有效划分,然后进行路径规划,有效避免喷涂作业过程中无法喷涂作业的盲区。此外,本发明中根据地貌状况计算喷涂量,能精确控制喷涂作业过程中地坪漆的输出量,避免少喷或者过喷导致刮涂不均等问题。本发明实现了地坪漆智能化自动喷涂以及地坪漆快速干化和多余材料回收利用,绿色环保。
2、为实现上述目的,按照本发明的一个方面,提出了一种超大面积自流平一体式自动化高效刮涂方法,包括以下步骤:
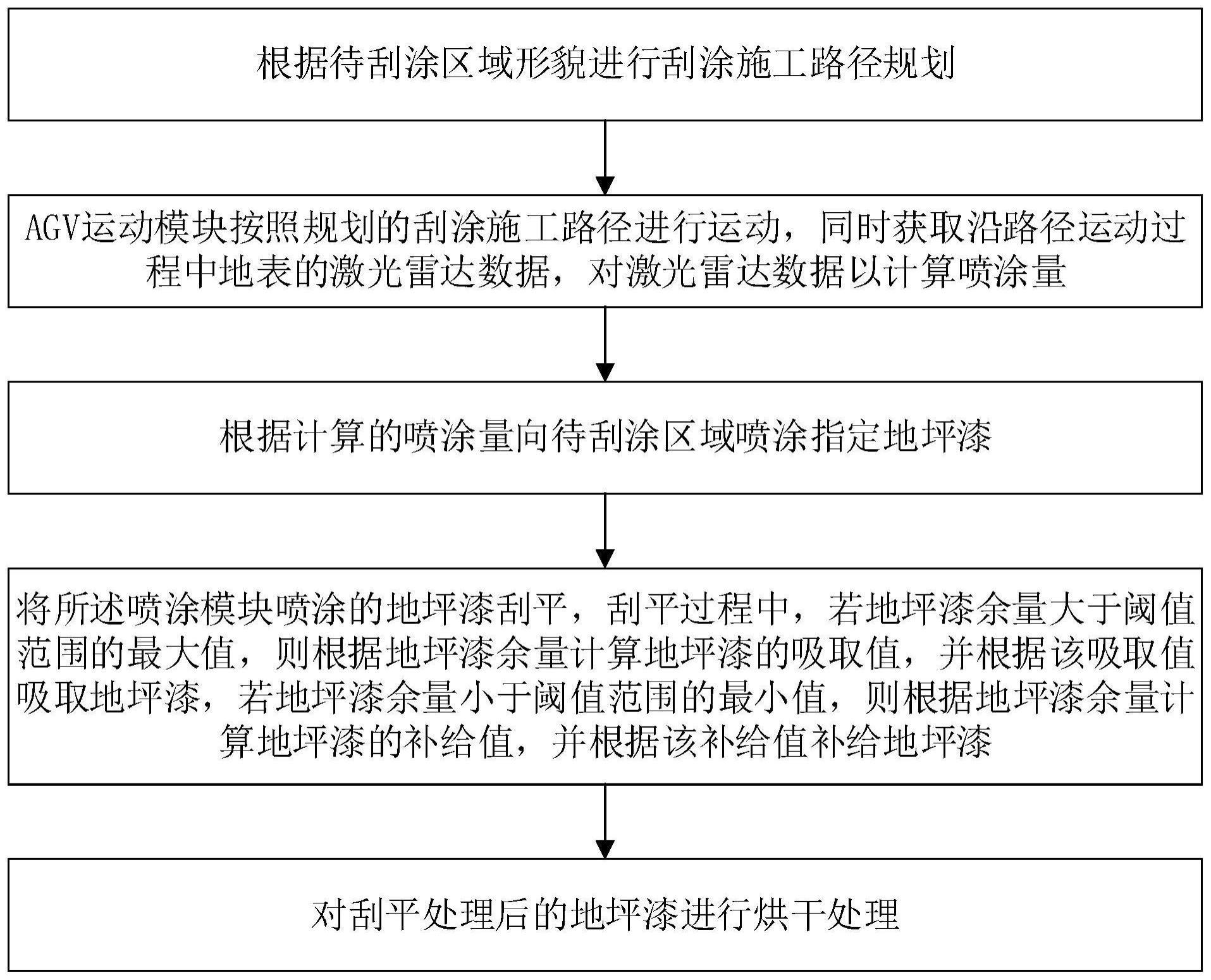
3、步骤一,根据待刮涂区域形貌进行刮涂施工路径规划;
4、步骤二,agv运动模块按照规划的刮涂施工路径进行运动,同时获取沿路径运动过程中地表的激光雷达数据,对激光雷达数据以计算喷涂量;
5、步骤三,根据计算的喷涂量向待刮涂区域喷涂指定地坪漆;
6、步骤四,将所述喷涂模块喷涂的地坪漆刮平,刮平过程中,若地坪漆余量大于阈值范围的最大值,则根据地坪漆余量计算地坪漆的吸取值,并根据该吸取值吸取地坪漆,若地坪漆余量小于阈值范围的最小值,则根据地坪漆余量计算地坪漆的补给值,并根据该补给值补给地坪漆;
7、步骤五,对刮平处理后的地坪漆进行烘干处理。
8、作为进一步优选的,步骤一具体包括以下步骤:
9、(1)获取待刮涂区域的设计三维结构模型;
10、(2)基于传感器获取待刮涂区域的空间结构模型;
11、(3)基于指定作业高度将所述设计三维结构模型与空间结构模型进行融合,生成第一作业区域和第二作业区域,其中,第一作业区域为agv运动模块无障碍运动区域,第二作业区域为agv运动模块障碍区域;
12、(4)根据第一作业区域和第二作业区域规划agv运动模块的刮涂施工路径。
13、作为进一步优选的,所述第一作业区域包括:指定作业高度范围内,设计三维结构模型和空间结构模型内agv运动模块无障碍运动的共同空间,然后将该空间投影至平面图上,生成第一作业区域;
14、所述第二作业区域包括:从地面至指定作业高度范围的最小值之间,待刮涂区域的平面图减去第一作业区域的区域。
15、作为进一步优选的,步骤二具体包括以下步骤:
16、(21)agv运动模块按照规划的刮涂施工路径进行运动,同时获取沿路径运动过程中地表的激光雷达数据;
17、(22)对地表的激光雷达数据进行处理,以获取地表粗糙结构,根据地表粗糙结构以及地坪漆的期望厚度计算喷涂量,具体的:
18、采用激光雷达测量地表数据,以获取激光雷达数据,对激光雷达数据进行坐标转化,以获取地表三维高程数据,对该三维高程数据进行拟合,以获取地表粗糙度形貌,即地表粗糙结构,根据地表粗糙结构以及地坪漆的期望厚度计算喷涂量。
19、作为进一步优选的,步骤三中,所述根据计算的喷涂量向待刮涂区域喷涂指定地坪漆包括:
20、根据喷涂量计算地坪漆喷涂余量,其中,所述喷涂余量的范围为地坪漆期望喷涂量的2~5%。
21、按照本发明的另一个方面,还提供了一种超大面积自流平一体式自动化高效刮涂系统,包括:
22、施工路径规划模块,用于根据待刮涂区域形貌进行刮涂施工路径规划;
23、agv运动模块,用于按照规划的刮涂施工路径进行运动,同时获取沿路径运动过程中地表的激光雷达数据,对激光雷达数据以计算喷涂量;
24、喷涂模块,用于根据计算的喷涂量向待刮涂区域喷涂指定地坪漆;
25、刮平模块,用于将所述喷涂模块喷涂的地坪漆刮平,刮平过程中,若地坪漆余量大于阈值范围的最大值,则根据地坪漆余量计算地坪漆的吸取值,并根据该吸取值吸取地坪漆,若地坪漆余量小于阈值范围的最小值,则根据地坪漆余量计算地坪漆的补给值,并根据该补给值补给地坪漆;
26、烘干模块,用于对刮平处理后的地坪漆进行烘干处理。
27、作为进一步优选的,所述喷涂模块设于所述agv运动模块上,包括第一喷涂装置和第二喷涂装置,所述第一喷涂装置包括与地坪漆储料罐连接的第一出料管,所述第一出料管底部连接有第一多孔喷料头,且所述多孔喷料头设于所述agv运动模块底部,沿所述agv运动模块的横向布置,用于喷涂第一作业区域;
28、所述第二喷涂装置包括与地坪漆储料罐连接的第二出料管,所述第一出料管底部连接有第二多孔喷料头,所述第二多孔喷料头通过设于所述agv运动模块底部、且沿所述agv运动模块横向运动的第一液压伸缩装置驱动,以喷涂第二作业区域。
29、作为进一步优选的,所述刮平模块设于所述agv运动模块上,包括第一刮平装置和第二刮平装置;
30、所述第一刮平装置包括第二液压伸缩装置、第一连杆、第一刮板以及第一补给料管,其中,所述第二液压伸缩装置固定设于agv运动模块底部,所述第二液压伸缩装置的动力输出端与第一连杆连接,所述第一连杆的另一端与第一刮板连接,所述第一刮板连接沿所述agv运动模块的横向设置,所述第一刮板上设有多个第一输料孔,每个所述第一输料孔通过所述第一补给料管与所述地坪漆储料罐连接,所述第一补给料管与所述地坪漆储料罐之间还设有第一抽吸泵;
31、所述第二刮平装置包括第三液压伸缩装置、第二连杆、第二刮板以及第二补给料管,其中,所述第三液压伸缩装置沿所述agv运动模块的底部纵向设置,所述第三液压伸缩装置的动力输出端与第二连杆连接,所述第二连杆的另一端与第二刮板连接,所述第二刮板连接沿所述agv运动模块的横向设置,所述第二刮板上设有多个第二输料孔,每个所述第二输料孔通过所述第二补给料管与所述地坪漆储料罐连接,所述第二补给料管与所述地坪漆储料罐之间还设有第二抽吸泵。
32、作为进一步优选的,还包括集成于所述agv运动模块上的主控模块和通信模块,所述通信模块用于实现主控模块与施工路径规划模块、agv运动模块、喷涂模块、刮平模块以及烘干模块之间的通信连接。
33、总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:
34、1.本发明可根据作业工具特点,对待刮涂区域有效划分,然后进行路径规划,有效避免喷涂作业过程中无法喷涂作业的盲区。此外,本发明中根据地貌状况计算喷涂量,能精确控制喷涂作业过程中地坪漆的输出量,避免少喷或者过喷导致刮涂不均等问题。本发明实现了地坪漆智能化自动喷涂以及地坪漆快速干化和多余材料回收利用,绿色环保。
35、2.本发明根据作业设备的特点,将作业区域划分了无障碍区域以及有障碍区域,其中,无障碍区域为设备可直接到达喷涂之处,其余为有障碍区域,然后,根据作业区域的不同,匹配不同的作业方式,相应的进行作业路径的规划,避免了漏涂,喷涂效率高。
36、3.本发明采用激光雷达测量地表数据,以获取激光雷达数据,对激光雷达数据进行坐标转化,以获取地表三维高程数据,对该三维高程数据进行拟合,以获取地表粗糙度形貌,即地表粗糙结构,根据地表粗糙结构以及地坪漆的期望厚度计算喷涂量。以此方式,可精确控制地坪漆的输出量,避免输出的地坪漆过少或者超量造成的涂抹不均。
37、4.本发明刮平过程中,若地坪漆余量大于阈值范围的最大值,则根据地坪漆余量计算地坪漆的吸取值,并根据该吸取值吸取地坪漆,若地坪漆余量小于阈值范围的最小值,则根据地坪漆余量计算地坪漆的补给值,并根据该补给值补给地坪漆,以此方式,始终保证刮平过程中地坪漆的余量一定,从而保证施工的精度和质量。
- 还没有人留言评论。精彩留言会获得点赞!