一种半自动吊挂式爬升卸料平台及其使用方法与流程
本发明属于光伏板安装,更具体地,涉及一种半自动吊挂式爬升卸料平台及其使用方法。
背景技术:
1、卸料平台是指施工现场经常搭设的各种临时性的操作台和操作架,一般用于材料的周转。卸料平台分为移动式卸料平台、落地式卸料平台、悬挑式卸料平台等。其中,悬挑式卸料平台(也称为悬挑卸料平台)是高层建筑中进行垂直运输的一个中转平台,一旦发生安全事故,极易造成重大人员伤亡、财产损失,出于施工安全考虑,目前悬挑式卸料平台推广使用的是型钢卸料平台。在传统的悬挑式卸料平台施工过程中,卸料平台安拆工序繁琐,楼内预埋及钢丝绳安装,占用大量的人工机械、且危险性较大,因此提出一种安全、高效、便捷的悬挑式卸料平台对卸料施工的有序进行具有重要意义。
2、现有技术中,发明专利cn107476556a公开了一种可移动式自动升降操作平台,包括可移动拖车、标准节、操作平台、简易小吊、驱动装置、套架,若干组标准节通过设置在操作平台上的简易小吊依次叠加安装在可移动拖车上构成操作平台上下升降的立柱,操作平台通过驱动装置之升降电机驱动上下升降,可移动拖车通过驱动装置之电机驱动可微调位置。其有益效果是:结构简单,运输、安装、拆卸方便,自动化程度高,省工省时省力,工人劳动强度小,安全可靠,既可作为施工用操作平台,又可作为施工材料垂直运输的工具,且操作平台的宽度可以调整加宽、高度可随意停留在任意位置,方便施工;此外,中国实用新型专利cn208473320u,公开了可移动的悬挑式卸料平台,包括水平悬挑梁、卸料平台、吊装卡环和钢丝绳,水平悬挑梁包括锚固段和悬挑段;锚固段通过锚固环与建筑梁板结构固定连接;锚固段顶面焊接设置有承接竖部;卸料平台包括底板、垂直设置在底板四周边缘位置的防护围栏以及踢脚板,底板上设置有孔洞;承接竖部穿过底板上的孔洞、与竖向防护杆底部插接固定;踢脚板上还设置有开合区域;u型吊装卡环下部与悬挑段之间焊接固定、上部贴合在开合区域的外侧面。设置合理,结构简单,实用性强。卸料平台可以周转使用,降低了使用成本。吊装卡环设置巧妙,只需要打开插销,旋转开合区域,就可以将吊装卡环露出,使用起吊设备将悬挑式卸料平台整体提升。
3、但上述专利中仍存在如下不足:(1)人工进出平台进行高处作业,平台不稳定,容易造成人为伤害,高空坠落,安全隐患较大,因此,应当避免人工行走于高空平台,从而尽可能减小危害性;(2)传统的高度爬升式卸料平台在楼层之间存在间隙,容易出现漏料、物料高空坠落的风险;(3)如何实现卸料平台中堆料箱吊动的无人化挂接作业,成为当前卸料平台的优化方向之一。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供一种半自动吊挂式爬升卸料平台及其使用方法,通过采用导磁材料进行吸引、采用压力传感器进行状态判断、通过卡板防脱驱动组件对起吊卡板进行卡接,最终实现了无人化吊挂作业,避免了人工行走于卸料平台存在的安全隐患,与此同时;与此同时,采用导磁式设计,提高了起吊卡板吸附至堆料箱壳体顶部的快速性。
2、为了实现上述目的,按照本发明的第一方面,提供一种半自动吊挂式爬升卸料平台,包括:
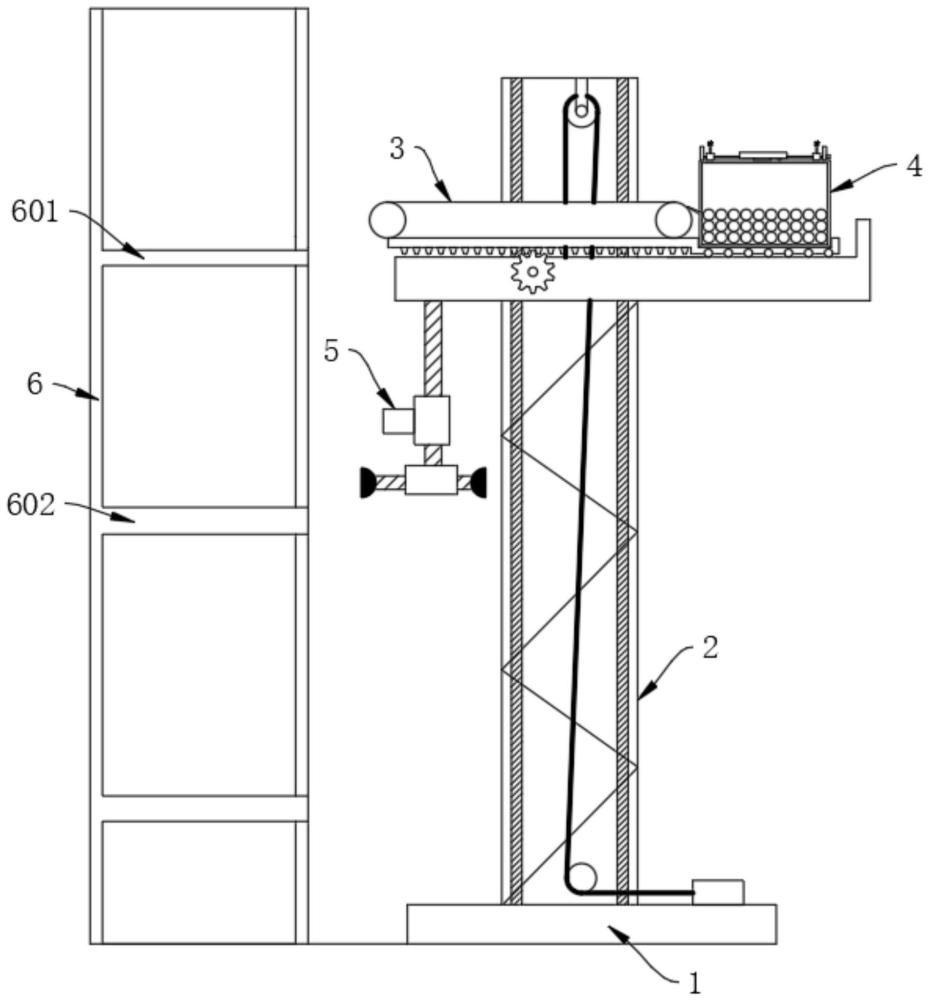
3、置于地面的定位基台、设于所述定位基台上方的电控高度爬升单元、与所述电控高度爬升单元的输出端固定连接并用于传送卸载物料的卸料传送单元、设于卸料传送单元输出端一侧并具有自动挂接起吊卡板的自挂式堆料箱体、设于电控高度爬升单元与待卸料建筑体之间起到支撑与定位作用的防倾覆支撑单元;
4、所述电控高度爬升单元,包括固定设于定位基台上方的三角拓扑式钢结构柱、竖向固定设于三角拓扑式钢结构柱内部的爬升导向光杆、与所述爬升导向光杆滑动连接的爬升支撑平台、用于驱动控制爬升支撑平台高度的爬升高度驱动组件;
5、所述爬升高度驱动组件,包括通过滑轮支撑块分别咋混动连接于三角拓扑式钢结构柱顶底两端的第二爬升驱动滑轮与第一爬升驱动滑轮、与所述第二爬升驱动滑轮与第一爬升驱动滑轮缠绕连接的爬升高度控制驱动绳、所述爬升高度控制驱动绳的两端分别与爬升高度控制驱动电机和爬升支撑平台固定连接;
6、通过电控高度爬升单元控制卸料传送单元的上下移动,用于不同高度的施工工位切换,通过采用自挂式堆料箱体实现对起吊卡板的自动夹紧定位、通过防倾覆支撑单元辅助实现电控高度爬升单元与待卸料建筑体的相对定位。
7、进一步地,所述的自挂式堆料箱体,包括:
8、堆料箱壳体、开设于堆料箱壳体左侧面用于方便物料滑入的堆料箱进料伸出口、存储卸载物料的箱体内腔;
9、设于所述堆料箱壳体顶部的强磁块、固定连接与所述强磁块上方并与其保持导磁固定连接的导磁块、设于导磁块底部用于感测导磁块上方重量变化的压力传感器,所述导磁块上方磁性吸引附着有起吊卡板;
10、用于将吸附的起吊卡板定位于堆料箱壳体顶部的卡板防脱驱动组件。
11、进一步地,所述卡板防脱驱动组件包括:
12、设于堆料箱壳体顶部上表面四角的定位轴承块;
13、贯穿转动连接于后侧两个定位轴承块的自挂驱动丝杆、与所述自挂驱动丝杆同轴固定连接的自挂驱动电机、螺纹连接于自挂驱动丝杆左右两段的正旋向螺母块与反旋向螺母块。
14、进一步地,所述卡板防脱驱动组件包括:
15、一端均通过支撑杆设于正旋向螺母块与反旋向螺母块上表面的两根横向卡接杠杆;
16、贯穿转动连接于前侧两个定位轴承块的自挂导向光杆、滑动连接于自挂导向光杆左右两段的第一导向滑块、和第二导向滑块、所述第一导向滑块、和第二导向滑块均通过支撑杆与所述的两根横向卡接杠杆另一端固定连接。
17、进一步地,所述卸料传送单元包括:
18、卸料组件、用于驱动卸料组件沿爬升支撑平台水平方向滑动伸出于收回的卸料组件伸出单元。
19、进一步地,所述卸料组件包括主动皮带轮毂、从动皮带轮毂、与所述主动皮带轮毂和从动皮带轮毂啮合连接的传送皮带、驱动主动皮带轮毂转动的卸料驱动电机。
20、进一步地,所述卸料组件伸出单元包括:
21、设于卸料组件下方的第一滑动支撑底盘;
22、与爬升支撑平台转动连接的卸料组件伸出驱动齿轮、固定设于所述第一滑动支撑底盘下方并与所述卸料组件伸出驱动齿轮保持啮合传动的卸料组件伸出从动齿条。
23、进一步地,所述卸料组件伸出单元包括:与第一滑动支撑底盘的右端固定连接并用于支撑装载自挂式堆料箱体的第二滑动支撑底盘、设于第二滑动支撑底盘用于使其与爬升支撑平台上表面滚动连接的滑动支撑轮。
24、进一步地,所述防倾覆支撑单元,包括:
25、固定设于爬升支撑平台下方的竖向撑杆、用于控制竖向撑杆伸缩的第一撑杆长度调整装置;
26、固定设于竖向撑杆下端的横向撑杆、用于控制横向撑杆伸缩的第二撑杆长度调整装置;
27、设于横向撑杆两端的吸力盘。
28、按照本发明的第二方面,提供一种半自动吊挂式爬升卸料平台的使用方法,包括如下步骤:
29、s100:基于工程需求,在施工区域建设本发明,通过爬升高度控制驱动电机转动,从而实现爬升高度控制驱动绳的收放操作,进而在第一爬升驱动滑轮与第二爬升驱动滑轮的作用下,带动爬升支撑平台的上下移动,从而到达指定的卸料工位;
30、s200:启动防倾覆支撑单元,辅助定位本发明与待卸料建筑体之间的相对位置,防止本发明发生倾覆;
31、s300:启动卸料传送单元,人工在待卸料建筑体中将物料置于卸料传送单元中,通过卸料传送单元将物料转运至自挂式堆料箱体中;
32、s400:当自挂式堆料箱体填装满后,通过吊车的起吊吊绳将起吊卡板吊放于自挂式堆料箱体顶部,并逐渐靠近导磁块,当靠近至一定距离范围后,在磁吸力的作用下,起吊卡板被吸附于导磁块上表面,此时压力传感器感测到重力变化;
33、s500:当重力变化被检测到后,可判断起吊卡板已经被成功的吸引至导磁块上表面,此时启动卡板防脱驱动组件,将起吊卡板卡接至导磁块上表面,防止两者分离;
34、s600:通过吊车起吊自挂式堆料箱体,从而完成卸料,卸料完成后,再将自挂式堆料箱体放置卸料平台原位,并控制卡板防脱驱动组件将起吊卡板松开,从而完成一轮的卸料作业;
35、s700:重复上述步骤,直至卸料作业全部完成。
36、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
37、1.本发明的一种半自动吊挂式爬升卸料平台,通过采用导磁材料进行吸引、采用压力传感器进行状态判断、通过卡板防脱驱动组件对起吊卡板422进行卡接,最终实现了无人化吊挂作业,避免了人工行走于卸料平台存在的安全隐患,与此同时;与此同时,采用导磁式设计,提高了起吊卡板422吸附至堆料箱壳体401顶部的快速性;
38、2.本发明的一种半自动吊挂式爬升卸料平台,通过采用丝杆传动机构及光杆导向传动机构结合,有效实现了对起吊卡板(422)的卡接。使用时,仅需控制自挂驱动电机(405)正向转动,从而带动自挂驱动丝杆(406)转动,在正反向螺纹传动作用下,位于起吊卡板(422)上方两侧的横向卡接杠杆(4010)向起吊卡板(422)中心靠近,从而防止了起吊卡板(422)脱离;
39、3.本发明的一种半自动吊挂式爬升卸料平台,通过采用了齿轮齿条机构,有效实现了卸料组件的伸出,解决了现有技术中卸料平台与待卸料建筑体之间间隙太大引发的高空坠物的安全隐患,使用时,仅需控制卸料组件伸出驱动齿轮转动,带动卸料组件伸出从动齿条水平移动即可实现传动带伸出至待卸料楼层内部,提高了施工的安全性。
- 还没有人留言评论。精彩留言会获得点赞!