智能墙面拍浆拉毛装置的制作方法
本发明涉及建筑墙面施工,具体涉及一种智能墙面拍浆拉毛装置。
背景技术:
1、甩浆、拍浆和拉毛是墙、梁等抹灰基层处理的一种工艺,有利于抹灰层与基层黏结牢固,从而达到提高抹灰质量的目的,目前,其常规作业方法是用工具蘸取水泥浆水,在墙面拍打,使水泥水渗入墙面形成一个个凸点,以达到增加表面粗糙度的效果,该做法容易造成拍打不均匀、毛面高低不一致、水泥浆水使用率不高等现象,不仅附着力不理想,而且降低了整个工程项目的效率。
技术实现思路
1、本发明的目的是提供一种智能墙面拍浆拉毛装置,该装置施工效率高,拍打均匀、拍打效果有保证。
2、本发明所采用的技术方案是:
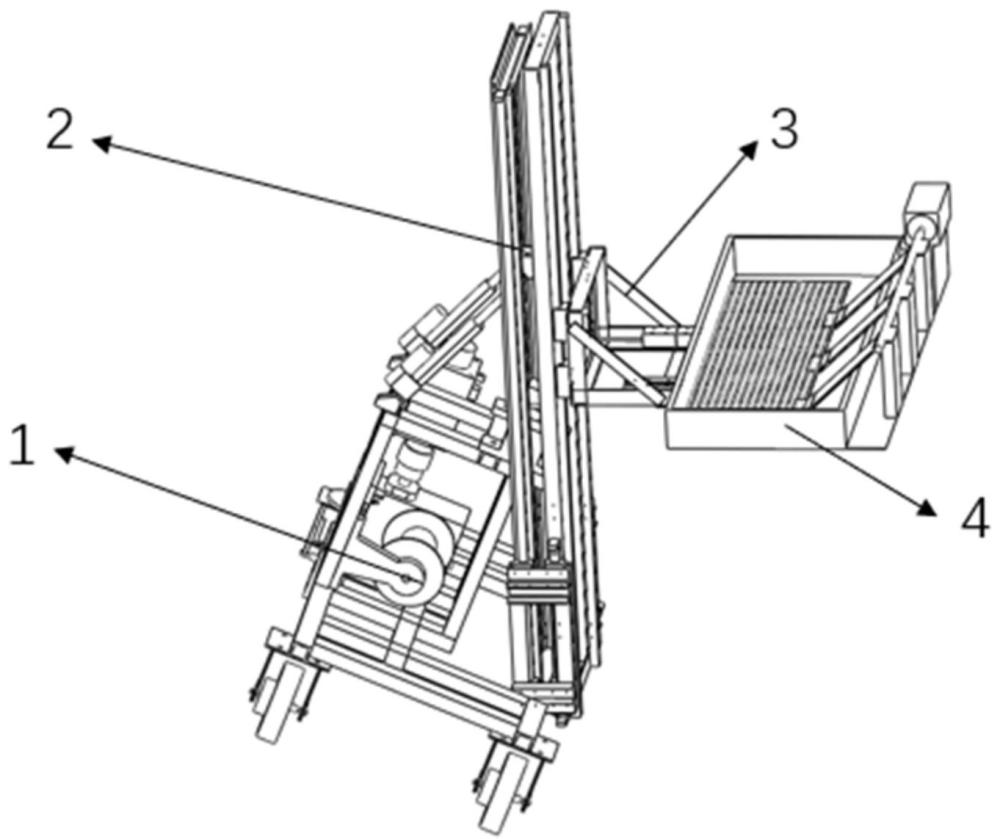
3、一种智能墙面拍浆拉毛装置,包括移动小车、前后角度可调地设在移动小车上的纵向导架、可升降地设在纵向导架上的升降座、安装在升降座上且位于移动小车前端的拍浆器、控制系统;拍浆器包括用于存储砂浆且朝上敞开的料盒、可旋转安装在料盒前侧的同步轴、驱动同步轴的电机、分布设在同步轴沿线的连杆、一侧长边通过弹簧合页与沿线连杆连接的拍浆板,拍浆板包括两层板叠放在一起且错开位置可调的孔板,两层孔板上的矩阵开孔相互对应,通过调整两层孔板的错开位置能调整拍浆板工作时的孔隙,电机能带动拍浆板在料盒内和料盒上前方转移;控制系统能调整纵向导架角度使之与墙面角度相适应,能设定一次蘸料对应的拍浆次数,能根据施工区域设定工作路径并控制移动小车、升降座和拍浆器按照设定的工作路径完成全部拍浆拉毛工作。
4、工作前:先让移动小车面向墙面,调整移动小车的位置使拍浆器与墙面保持合适的距离,控制系统调整纵向导架角度使之与墙面角度相适应,将砂浆注入料盒,调整两层孔板的错开位置使拍浆板的孔隙处于合适尺寸;然后在控制系统设定一次蘸料对应的拍浆次数,向控制系统输入施工区域,控制系统根据施工区域设定工作路径。
5、工作时:整个装置从施工区域横向一端向另一端逐段施工,在每段施工中,拍浆板从下往上逐层拍浆拉毛,拍浆板先在料盒内蘸料并向墙面拍打一次,之后每升一层则向墙面拍打一次,当达到对应的拍浆次数后,则在料盒内蘸料,如此重复直至覆盖所在段纵向范围;当前段施工完成后,移动小车移动至下一段位置,升降座下降至底部起点位置,再进行从下往上逐层拍浆拉毛,如此重复直至覆盖所有施工区域。
6、控制系统进行一次蘸料多次拍浆的控制流程是:电机带动拍浆板向后摆动进入料盒内蘸料,然后电机带动拍浆板向前摆动拍打在墙面上,然后电机带动拍浆板向后摆动离开墙面但不进入料盒,同时升降座带动拍浆器上升一层,然后电机带动拍浆板向前摆动拍打在墙面上,如此重复直至达到设定的拍浆次数。
7、本发明的有益效果是:
8、该装置能自动对施工区域进行全面的拍浆拉毛作业,单次拍打作业面大,并且拍浆板采用一次蘸料多次拍浆的控制方式,施工效率高,同时避免了由于蘸料后时间过长造成砂浆凝固的缺点;在本装置中,拍浆板的拍浆角度、力度一致,拍浆板拍打在墙面上时弹簧合页还能施加一定的力,因此,拍打均匀、拍打效果有保证;在本装置中,拍浆板工作时的孔隙可调,可根据需要调整墙面拉毛效果。
技术特征:
1.一种智能墙面拍浆拉毛装置,其特征在于:包括移动小车、前后角度可调地设在移动小车上的纵向导架、可升降地设在纵向导架上的升降座、安装在升降座上且位于移动小车前端的拍浆器、控制系统;拍浆器包括用于存储砂浆且朝上敞开的料盒、可旋转安装在料盒前侧的同步轴、驱动同步轴的电机、分布设在同步轴沿线的连杆、一侧长边通过弹簧合页与沿线连杆连接的拍浆板,拍浆板包括两层板叠放在一起且错开位置可调的孔板,两层孔板上的矩阵开孔相互对应,通过调整两层孔板的错开位置能调整拍浆板工作时的孔隙,电机能带动拍浆板在料盒内和料盒上前方转移;控制系统能调整纵向导架角度使之与墙面角度相适应,能设定一次蘸料对应的拍浆次数,能根据施工区域设定工作路径并控制移动小车、升降座和拍浆器按照设定的工作路径完成全部拍浆拉毛工作。
2.如权利要求1所述的智能墙面拍浆拉毛装置,其特征在于,工作前:先让移动小车面向墙面,调整移动小车的位置使拍浆器与墙面保持合适的距离,控制系统调整纵向导架角度使之与墙面角度相适应,将砂浆注入料盒,调整两层孔板的错开位置使拍浆板的孔隙处于合适尺寸;然后在控制系统设定一次蘸料对应的拍浆次数,向控制系统输入施工区域,控制系统根据施工区域设定工作路径。
3.如权利要求2所述的智能墙面拍浆拉毛装置,其特征在于,工作时:整个装置从施工区域横向一端向另一端逐段施工,在每段施工中,拍浆板从下往上逐层拍浆拉毛,拍浆板先在料盒内蘸料并向墙面拍打一次,之后每升一层则向墙面拍打一次,当达到对应的拍浆次数后,则在料盒内蘸料,如此重复直至覆盖所在段纵向范围;当前段施工完成后,移动小车移动至下一段位置,升降座下降至底部起点位置,再进行从下往上逐层拍浆拉毛,如此重复直至覆盖所有施工区域。
4.如权利要求1至3任一所述的智能墙面拍浆拉毛装置,其特征在于,控制系统进行一次蘸料多次拍浆的控制流程是:电机带动拍浆板向后摆动进入料盒内蘸料,然后电机带动拍浆板向前摆动拍打在墙面上,然后电机带动拍浆板向后摆动离开墙面但不进入料盒,同时升降座带动拍浆器上升一层,然后电机带动拍浆板向前摆动拍打在墙面上,如此重复直至达到设定的拍浆次数。
技术总结
本发明公开了一种智能墙面拍浆拉毛装置,包括移动小车、前后角度可调地设在移动小车上的纵向导架、可升降地设在纵向导架上的升降座、安装在升降座上且位于移动小车前端的拍浆器、控制系统;拍浆器包括用于存储砂浆且朝上敞开的料盒、可旋转安装在料盒前侧的同步轴、驱动同步轴的电机、分布设在同步轴沿线的连杆、一侧长边通过弹簧合页与沿线连杆连接的拍浆板;控制系统能调整纵向导架角度使之与墙面角度相适应,能设定一次蘸料对应的拍浆次数,能根据施工区域设定工作路径并控制移动小车、升降座和拍浆器按照设定的工作路径完成全部拍浆拉毛工作。该装置施工效率高,拍打均匀、拍打效果有保证。
技术研发人员:廖红玉,陈萌萌,李婉君,周亭
受保护的技术使用者:中国一冶集团有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!