一种大面积混凝土底板平整度控制系统及施工方法与流程
本发明涉及建筑施工,更具体地,涉及一种大面积混凝土底板平整度控制系统及施工方法。
背景技术:
1、超大面积混凝土底板施工技术是一种用于建筑工程中的地面铺设方法,适用于大型仓库、工厂、停车场等需要平整、坚固地面的场所,而超大面积地坪漆施工的首要关键就是底板面是否平整,若不平整则会因为凹凸不平而使得后期作业人员需要进行不断打磨地面直至平整度达到要求,若为小面积底板施工则处理相对容易,若是大面积或超大面积底板施工,平整度控制不好的话则后期地坪漆施工不仅费时费力,而且处理较为麻烦。传统方法存在弊端或无法满足施工需求,因此超大面积混凝土底板平整度控制是施工领域一大亟待解决的难题。
2、现有技术存在如下缺陷:(1)不能实现振动刮平、混凝土回收回填以及覆膜多项工艺的同步自动化操作;(2)超大面积混凝土底板施工依旧通过人工采用水准仪定好标高后标记于墙体钢筋,然后采用刮板进行人工刮平的形式进行施工,由于作业人员技术水平参差不齐,底板面的厚度得不到保证,从而导致整体底板面平整度难以控制。
技术实现思路
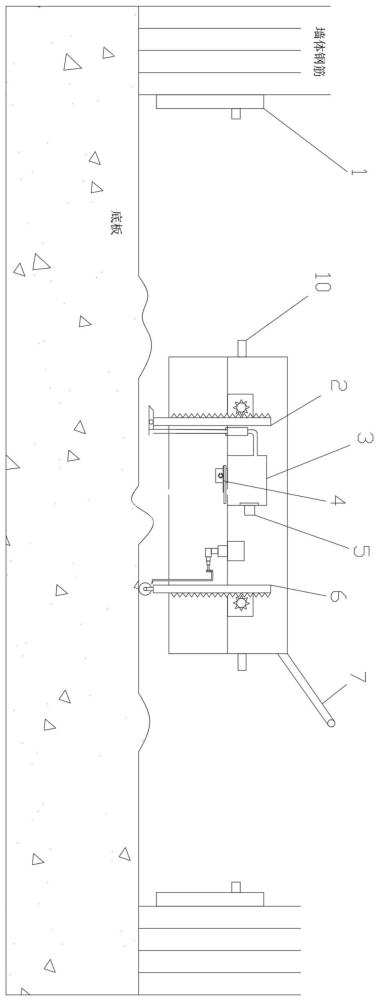
1、针对现有技术的以上缺陷或改进需求,本发明提供一种大面积混凝土底板平整度控制系统及施工方法,为了实现上述目的,系统包括系统本体和固定设置在底板四周的墙体钢筋上的标尺器,系统本体包括刮震装置、收料室、放料开关、抽风机、覆膜装置、滚筒和激光接收器,标尺器用于调整高度并发射激光至系统本体外壳上的激光接收器,为混凝土底板平整提供标高,激光接收器接收到激光信号后启动刮震装置,刮震装置设置在系统本体内,底部从系统本体内延伸出来,用于对底板捣振刮平,抽风机为收料室提供吸力,通过刮震装置将底板表面多余的混凝土吸入传输至收料室,收料室的底部出口对底板混凝土局部缺口进行填平,覆膜装置通过滚筒转动将薄膜覆盖至混凝土面,解决了大面积混凝土底板施工平整度偏差较大,以及刮平和覆膜工艺不能同时同步进行的问题
2、本发明提供一种大面积混凝土底板平整度控制系统,包括系统本体和固定设置在墙体上的标尺器,所述系统本体包括刮震装置、收料室、放料开关、抽风机、覆膜装置、滚筒和激光接收器,所述标尺器调整标高并发射激光至所述系统本体外壳上的所述激光接收器,所述激光接收器固定在所述系统本体侧面;所述刮震装置固定设置于所述系统本体内,所述刮震装置在所述系统本体内升降活动并从其底部伸出,所述刮震装置包括第一电机、第一齿条杆、回收组件以及刮板,所述第一电机固定于所述系统本体内,所述第一电机与竖直设置的所述第一齿条杆传动连接;所述刮板固定设置在所述第一齿条杆底部,所述刮板与混凝土底板接触,所述回收组件一端设置在所述刮板上,另一端延伸至所述系统本体内部与所述收料室连通,所述收料室和所述抽风机两者连通并固定设置在所述系统本体内,所述放料开关设置在所述收料室的底部,所述收料室底部设置落料口;所述覆膜装置固定设置在所述系统本体内
3、进一步地,所述覆膜装置包括驱动组件、滚筒、第三电机、第三齿条杆、割刀以及传动杆,所述系统本体内设置隔板,所述第三电机固定设置在所述隔板上,所述第三齿条杆竖直滑动连接于所述隔板上,所述第三齿条杆与所述第三电机啮合传动连接,所述滚筒转动设置在所述第三齿条杆的底部,所述驱动组件与所述传动杆传动连接,所述割刀固定在所述传动杆底部,所述割刀在所述传动杆的带动下切断所述滚筒上的薄膜。
4、进一步地,所述回收组件包括吸料管和滑管,所述滑管下端固定于所述刮板,上端滑动连接于所述吸料管内,所述滑管与所述吸料管连接处密封,所述吸料管连通固定设置在所述收料室上,所述收料室固定设置在所述系统本体内。
5、进一步地,所述抽风机固定在收料室侧壁,所述抽风机的进风口与所述收料室连通,所述抽风机在所述收料室产生吸力,使所述回收组件内形成负压。
6、进一步地,所述放料开关包括第二电机、第二电机转杆、落料口和封口板,所述放料开关设置于所述收料室底部的所述落料口处,所述第二电机固定设置在所述收料室的底部,所述第二电机转杆与所述封口板传动连接,所述第二电机与所述第二电机转杆传动连接,所述第二电机转杆水平设置,所述封口板水平滑动连接于所述收料室的底部,所述第二电机转杆与所述封口板固定连接。
7、进一步地,所述刮震装置包括振动棒,所述振动棒固定设置所述第一齿条杆的底部。
8、进一步地,所述标尺器包括激光发射器、标尺、刻度、挡板、推拉杆以及标尺槽,所述标尺器内开设有所述标尺槽,所述标尺在所述标尺槽内上下滑动连接,所述标尺器上设置刻度,所述挡板固定在所述标尺器上,所述推拉杆与所述挡板转动连接,所述推拉杆穿过所述挡板与所述标尺螺纹连接,所述激光发射器固定设置在所述标尺上。
9、进一步地,所述滚筒包括支撑杆、滚轴、合页和锁件,所述支撑杆水平固定设置于所述第三齿条杆底部,所述滚轴一端转动设置在所述支撑杆上,另一端设置所述合页,所述合页活动端部固定所述锁件。
10、进一步地,所述锁件包括活动部分和固定部分,所述活动部分设置在所述合页上,所述活动部分随所述合页扣合至所述固定部分上。
11、作为本发明的另一个方面,本发明还提供一种大面积混凝土底板平整度控制施工方法,包括:
12、s100:确定底板面标高,根据结构设计图纸要求,通过水准仪确定好标高,然后将标尺器固定于底板四周的墙体钢筋,调整推拉杆至激光发射器中心对准已确定好的标高,开启激光发射器,沿着水平方向发射出一条水平激光线;
13、s200:浇筑混凝土,根据确定好的标高浇筑混凝土;
14、s300:启动激光接收器,启动第一电机调节第一齿条杆直至激光接收器接收到激光线,调整装置直至系统本体至少接收到三个方向的激光线;
15、s400:启动刮震装置开始刮平,启动刮板内的振动棒,然后推动系统本体移动,按照标高开始刮平;
16、s500:回收堆积的混凝土,启动抽风机,使得收料室和回收组件内产生负压,通过回收组件将多余混凝土吸入收料室内,吸入的多为水泥浆和小粒径骨料;
17、s600:填补混凝土凹陷处,当刮平混凝土底板面时遇到缺口位置,则启动第二电机,带动封口板移动打开落料口,将收料室收集的混凝土卸至缺口填充;
18、s700:混凝土覆膜,启动覆膜装置,当混凝土面刮平后打开第三电机,调节第三齿条杆直至滚筒表面贴合混凝土面,推动系统本体移动,滚筒对混凝土面覆盖薄膜;
19、s800:割断薄膜,当薄膜贴至混凝土面端部时启动驱动组件,调节割刀位置直至贴合薄膜面,通过割刀沿滚筒轴向滑动转动切割薄膜,直至薄膜割断后停止,收回割刀,完成混凝土薄膜覆盖。
20、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
21、1.本发明提供一种大面积混凝土底板平整度控制系统,包括系统本体和固定设置在底板四周的墙体钢筋上的标尺器,系统本体包括刮震装置、收料室、放料开关、抽风机、覆膜装置、滚筒和激光接收器,标尺器用于调整高度并发射激光至系统本体外壳上的激光接收器,为混凝土底板平整提供标高,激光接收器接收到激光信号后启动刮震装置,刮震装置设置在系统本体内,底部从系统本体内延伸出来,用于对底板捣振刮平,抽风机为收料室提供吸力,通过刮震装置将底板表面多余的混凝土吸入传输至收料室,收料室的底部出口对底板混凝土局部缺口进行填平,覆膜装置通过滚筒转动将薄膜覆盖至混凝土面,解决了大面积混凝土底板施工平整度偏差较大,以及刮平和覆膜工艺不能同时同步进行的问题。
22、2.本发明提供一种大面积混凝土底板平整度控制系统,采用刮震装置固定设置于系统本体内,第一电机与竖直设置的第一齿条杆传动连接,以驱动第一齿条杆升降,直至激光接收器接收到激光信号,使第一电机将第一齿条杆维持在所需标高,振动棒固定设置第一齿条杆的底部的刮板内,刮板对混凝土底板进行振动及刮平施工,滑管上端滑动连接于吸料管内,第一齿条杆升降时滑管伴随在吸料管内滑动,吸料管连通固定设置在收料室上,吸料管和滑管形成了刮板所处位置与收料室连通的回收组件,该回收组件将多余混凝土吸入滑管最终回收储存在收料室,刮震装置的设计可随时调节装置高度,收集多余混凝土料填补混凝土面存在的缺口,合理充分利用混凝土,减少浪费,具有良好的环保功能。
23、3.本发明提供一种大面积混凝土底板平整度控制系统,经过刮震装置和落料回填处理将混凝土底板面刮平后,启动覆膜装置,通过第三电机驱动第三齿条杆升降直至滚筒贴合底板面,将薄膜套在滚筒上,在推动整个系统本体移动的过程中带动滚筒转动,进而将薄膜覆盖至混凝土面,完成薄膜覆盖,竖向千斤顶和横向千斤顶分别用于调整切割组件的高度和横向切割,以适应滚筒的高度位置然后完成薄膜切割,通过设置覆膜装置,可以在振动刮平后紧接着同步进行覆膜,将传统的刮平、覆盖薄膜两道工序合二为一,实现自动化施工,减少人为作业,提高施工效率。
24、4.本发明提供一种大面积混凝土底板平整度控制系统,通过设置标尺器替代了传统采用标记确定标高,作业人员频繁对比标高点的繁琐,而且还能有效降低人为控制标高产生误差的概率,同时还能够精准控制混凝土面标高,良好控制混凝土面的平整度,有效提高施工效率。
- 还没有人留言评论。精彩留言会获得点赞!