一种泊车举升机、泊车区、车库框架、立体车库及方法与流程
本发明涉及智能立体车库领域,具体公开了一种举升式泊车智能立体车库及方法。
背景技术:
1、轿车或商务乘用车的立体停车库种类繁多,泊车效率是重要指标之一,尤其是早高峰大量上班族车辆大量拥入、快速泊车以免迟到,晚高峰车辆快速出库、早点回家的迫切心情,现有存取车效率低、存取车等待时间周期长的立体车库已经不适时宜,对立体车库提出了越来越高的要求,因此对立体车库存车量大、存取车速度快的解决方案显得尤为重要。
2、同时,在现有的专利中也公开了一些用于立体车库的汽车搬运装置,例如在cn202010444860.x中公开了一种分体夹持举升式汽车搬运器,该分体夹持举升式汽车搬运器包括停车位前轮架、停车位后轮架、横移台车、前智能搬运小车和后智能搬运小车,在横移台车上设置有搬运小车纵向移动导轨,在停车位前轮架与停车位后轮架之间,设置有侧向导入搬运小车板,侧向导入搬运小车板与搬运小车纵向移动导轨对接在一起,智能搬运小车通过侧向导入搬运小车板进入到汽车底盘下部,前智能搬运小车的结构与后智能搬运小车的结构是相同的,前智能搬运小车和后智能搬运小车各自独立设置在搬运小车纵向移动导轨上,并且前智能搬运小车的头部与后智能搬运小车的头部是反向设置的;后智能搬运小车上的前抱臂驱动电机输出轴上的抱夹驱动齿轮分别与一侧传动齿轮和另一侧第一传动齿轮啮合在一起,第一传动齿轮通过第二传动齿轮与设置在另一侧前抱臂上的另一侧前抱臂执行旋转齿轮啮合在一起,一侧传动齿轮与设置在一侧前抱臂上的一侧前抱臂执行旋转齿轮啮合在一起,前抱臂驱动电机是通过以上传动齿轮,来控制一侧前抱臂和另一侧前抱臂完成向车体两侧旋转伸出和向小车车体中心轴线收回的。但是该汽车搬运装置结构成本比较高,其需要配置两个搬运小车。
3、在专利cn202310478273.6中,公开了一种载车移动举升机,包括:座体,座体设置有容纳腔,座体的顶部开设有与容纳腔相同的开口;举升机构,举升机构的一端固定于容纳腔内,举升件的另一端能够自述开口往复举升活动;承接板,承接板固定于举升件的另一端,举升机构能够带动承接板做升降移动;转移机构,转移机构设于座体的底部,转移机构能够带动座体于水平面移动;开口的轮廓与承接板的轮廓相同,承接板能够盖合于开口,但是该举升机仅仅能实现举升功能,无法对车辆进行抱紧。
技术实现思路
1、为了解决人们日益提升的高质量生活需求,解决现有立体车库存在的技术不足,本发明的目的在于提供一种泊车举升机、泊车位、泊车区、车库框架及立体车库,可以用于轿车或商务乘用车等泊车,存取车效率高、存取车等待时间周期短的多层立体停车解决方案,降低时间成本、节能环保。
2、本发明采用的技术方案如下:
3、发明概述:
4、本发明提供一种举升式泊车智能立体车库,包括车库框架结构(1)、智能泊车区(2)、智能高效电梯(3)、立体道路(4)、立体车库总控系统,每2-12层为一基础组合的车库框架结构(1),每一层被赋予独有的层id号,每一层设置有1-7个或更多个智能泊车区(2),每一个智能泊车区(2)被赋予独有的区id号;配套设置有1-4部每2-12层为一基础组合的智能高效电梯(3),电梯内设有1-8个托床,智能高效电梯矩形结构的短边一侧与车库框架结构(1)配套对接、另一侧设有1-6个上下设置的道路对接口、与1-6条道路上下架设组成的立体道路(4)对接,智能高效电梯(3)可设置在车库框架结构(1)的外部或内部;更多层车库框架结构(1)及配套的智能高效电梯(3)均以2-12层相同或不同基础组合的整数倍进行叠加构建,在立体车库总控系统的管理调度下,举升式泊车智能立体车库高效安全运行。
5、发明详述:
6、第一方面,本发明提供一种泊车举升机(5),包括平夹机械手、举升机构、住车机构、平移机(5d)、测位仪(5v)、举升机控制系统,平移机(5d)安装在重型楼板(15)上,举升机构安装在平移机上,平夹机械手安装在举升机构上方,住车机构位于平夹机械手和举升机构两侧的前端安装在平移机(5d)上,测位仪(5v)安装在平夹机械手的前支板(5h)上,在举升机控制系统的控制下协调运行。
7、所述的举升机构包括缸体(5e)、举升架、重型弹簧(5g)、液压缸(5n)、液压杆(5p);缸体(5e)是矩形槽结构竖直放置安装在平移机(5d)上;举升架由举升板(52)和活塞(5f)组成,水平放置的举升板(52)与竖直的活塞(5f)的上部垂直连接成l型结构,活塞(5f)安装在缸体(5e)内通过自润滑实现自由上下运动,活塞(5f)的底面与缸体(5e)的内底面由1-4支或更多支重型弹簧(5g)连接在一起;液压缸(5n)竖直安装在平移机(5d)上,液压缸(5n)内的液压杆(5p)顶端安装在举升板(52)的下表面;在举升机控制系统的控制下,液压杆(5p)向上顶起或放下举升架和其上的平夹机械手,举升架的活塞(5f)在缸体(5e)内上下运动,重型弹簧(5g)对活塞(5f)起到配重和限位作用;优选的,所述活塞(5f)和缸体(5e)选择矩形结构或圆形结构;优选的,所述液压缸(5n)由液压站统一供液压油。
8、所述的住车机构包括单端电磁弹簧舌(5q)、住车支柱(5r)、横加强板(5s)、纵加强板(5t)、锁板(5u);左右各一支住车支柱(5r)位于平夹机械手和举升机构两侧的前端、分别竖直安装在平移机(5d)上,住车支柱(5r)顶端各安装有单端电磁弹簧舌(5q),两单端电磁弹簧舌(5q)的弹簧舌向内镜像对称安装;左右各一支锁板(5u)分别安装在举升板(52)前端两侧且与弹簧舌位置上下匹配对应;左右各一支横加强板(5s)一端分别水平安装在缸体(5e)左右两侧,另一端垂直安装在左右住车支柱(5r)上;纵加强板(5t)在举升板(52)的前部下方、两端垂直安装在住车支柱(5r)上。
9、所述的平夹机械手安装在举升板(52)的上表面,包括承重机构、驱动机构、传动机构、锁定机构、异型外壳(5l)、封盖(5m)、前支板(5h);左右各一承重机构竖直安装在举升板(52)和封盖(5m)之间、驱动机构和传动机构位于两承重机构之间竖直安装在举升板(52)和封盖(5m)之间,两承重机构、驱动机构和传动机构之间以齿轮齿合对接,其外围由异型外壳(5l)封闭,异型外壳(5l)下边缘安装在举升板(52)上、上边缘安装有封盖(5m)、前面板上边缘中部与封盖(5m)之间安装有前支板(5h),前支板(5h)内侧安装有锁定机构;
10、所述承重机构由弯月臂(51)、弯月臂轴(55)、弯月臂齿轮(5b)、弯月臂轴安装轴承对(59)组成;所述弯月臂(51)一端是带有圆台圈的臂板、其圆台圈通过销轴安装在弯月臂轴(55)上,另一端是弯月结构板,两支一组的弯月臂(51)设置在同一水平面上、其弯月结构板的弯月形向内镜像对称设置,用于抱在轮胎底部;左右各一支弯月臂轴(55)竖直放置、其上下端由弯月臂轴安装轴承对(59)分别安装在上封盖(5m)底面和举升板(52)的上表面,两支弯月臂轴(55)的上部由上而下依次对应各安装有弯月臂(51)和弯月臂齿轮(5b),两支弯月臂(51)镜像对称安装在同一水平面上;所述驱动机构由伺服电机(53)、电机轴(56)、动力齿轮(5a)、电机轴安装轴承(57)组成,伺服电机(53)竖向设置在两支弯月臂轴(55)之间靠近右侧,其底端安装在举升板(52)上,电机轴(56)的顶端通过电机轴安装轴承(57)安装在封盖(5m)的下表面,动力齿轮(5a)安装在电机轴(56)的上部、与右侧的右弯月臂齿轮(5b)成对齿合安装;传动机构由传动轴(54)、传动轴安装轴承对(58)、传动齿轮(5c)组成,传动轴(54)竖直安装在左弯月臂轴(55)和电机轴(56)之间,传动轴(54)上下两端分别通过传动轴安装轴承对(58)安装在封盖(5m)下表面和举升板(52)上表面,传动齿轮(5c)安装在传动轴(54)的上部,传动齿轮(5c)右边与动力齿轮(5a)成对齿合安装、左边与左弯月臂齿轮(5b)成对齿合安装;动力齿轮(5a)左边通过传动齿轮(5c)驱动左弯月臂齿轮(5b)、右边驱动右弯月臂齿轮(5b),使左右两弯月臂(51)同步同方向运动;
11、所述的锁定机构由双端电磁弹簧舌(5k)和锁杆(5j)组成,双端电磁弹簧舌(5k)两端均有弹簧舌,安装在前支板(5h)的内侧,左右各一支锁杆(5j)分别安装在左右弯月臂(51)的同一侧镜像对称、且与双端电磁弹簧舌(5k)的弹簧舌在同一水平面上相对应匹配;异型外壳(5l)整体是矩形箱体结构,其底部安装在举升板(52)上,其上部安装有封盖(5m),其前面上部两侧弯月臂(51)运行的90度区域是敞开结构,使弯月臂(51)可由平行停放位旋转90度到正前方的垂直工作位之间自由往返运行,所述平行停放位即左右弯月臂(51)平行于异型外壳(5l)前面板,所述垂直工作位即左右弯月臂(51)垂直于异型外壳(5l)前面板,所述弯月臂(51)常态下是处于平行停放位。
12、优选的,所述平夹机械手的伺服电机(53)可以安装在封盖(5m)上表面,电机轴(56)穿过封盖(5m)向下、其端部通过电机轴安装轴承(57)安装在举升板(52)上,此方案可使弯月臂轴(55)、电机轴(56)和传动轴(54)的长度大幅度缩短,提高其结构强度、刚度和稳定性,若泊车举升机(5)总高度不足可通过提高举升机构的安装基础调整。
13、所述测位仪(5v)安装在前支板(5h)外侧,在举升机控制系统控制下,自动测定车辆前后轮位置,控制平移机(5d)使泊车举升机(5)及其平夹机械手实现左右200mm调整,使平夹机械手精确对准不同轴距车辆轮胎底部位置。
14、第二方面,本发明还提供一种举升式泊车位(2t),包括上述泊车举升机(5)、泊车位通道(2s)、导向板(2r)、自动挡板(27)、位置标识器(24)、挡板感应器(2c)、泊车位控制系统;在泊车位通道(2s)左右两侧镜像对称的安装有四台泊车举升机(5)、其弯月臂(51)垂直工作位对应车辆的四个轮胎,泊车位通道(2s)宽度满足泊车机器人自由进出,对不同轴距的车辆测位仪(5v)自动测定车辆前后轮位置,在举升机控制系统的控制下,平移机(5d)可实现平夹机械手左右200mm间距调整,使平夹机械手精确对准车辆四只轮胎底部位置;在泊车位通道(2s)入口设置有导向板(2r)和挡板感应器(2c),入口处还设置有自动挡板(27)以保护车辆,泊车位通道(2s)里端车轮停放位外侧设置有自动挡板(27)以辅助泊车机器人精准定位停车,在泊车位通道(2s)中心位置设有位置标识器(24)并被赋予了独有的泊车位id编码;在泊车位控制系统管理下,四台泊车举升机(5)上下同步运行进行以完成泊车作业或取车作业;
15、所述举升式泊车位(2t)可多个串联使用,1-3个举升式泊车位(2t)串联在一起,多泊车位串联使用时,从第二个举升式泊车位(2t)开始,省去了入口处的自动挡板(27)和挡板感应器(2c);多泊车位串联使用时最里边泊车位通道(2s)里端的自动挡板(27)是常升起状态。
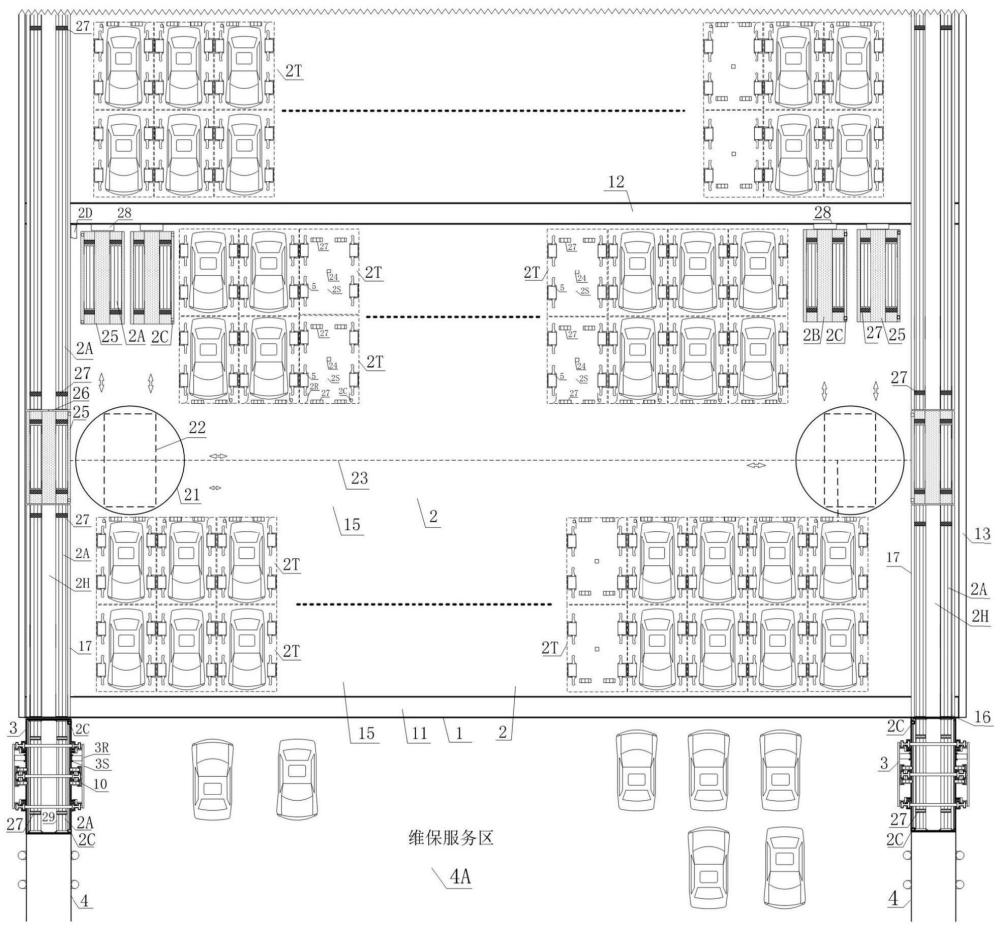
16、第三方面,本发明提供一种智能泊车区(2),包括上述举升式泊车位(2t)、重型楼板(15)、泊车区车道段、旋转盘(21)、虚拟停留区(22)、存取车虚拟轨道(23)、泊车机器人(25)、机器人维护充电区、智能泊车区控制系统;举升式泊车位(2t)、泊车区车道段、旋转盘(21)、虚拟停留区(22)、存取车虚拟轨道(23)、泊车机器人(25)、机器人维护充电区均设置在重型楼板(15)上,重型楼板(15)左右两端各设有一条泊车区车道段,每条泊车区车道段的中部均设有车道槽(26),车道槽(26)的深度等于泊车机器人(25)的高度、其宽度满足泊车机器人(25)的横向自由进出,左右车道槽(26)的中心线在同一条线上即存取车虚拟轨道(23),存取车虚拟轨道(23)两侧垂直方向并列设置有多排泊车位,每排泊车位串联设置有1-3个或更多个举升式泊车位(2t);存取车虚拟轨道(23)左右两端靠近泊车区车道段内侧均设有旋转盘(21)用于车辆调头,旋转盘(21)上设有虚拟停留区(22)引导泊车机器人(25)精准停车;
17、进一步的,智能泊车区(2)一端或两端泊车区车道段内侧设置有机器人维护充电区,机器人维护充电区可停放2-3台或更多台泊车机器人(25),每个泊车机器人(25)停放位设置有无线充电系统(28)或自动插拔式装置,使泊车机器人停留待命期间可充电;存取车虚拟轨道(23)贯通左右车道槽(26)、左右旋转盘(21)、虚拟停留区(22)、机器人维护充电区和每排泊车位,泊车机器人(25)沿存取车虚拟轨道(23)往复运行进行存取车作业;智能泊车区在智能泊车区控制系统的控制管理下安全高效运行。
18、所述泊车区车道段包括上述车道槽(26)、自动挡板(27)、槽型传送履带(2a),泊车区车道段中部设有车道槽(26),车道槽(26)前后两端的泊车区车道段上各设有自动挡板(27)用以保护车辆和空置时的车道槽(26);泊车区车道段上的两条槽型传送履带(2a)与泊车机器人(25)上槽型传送履带(2a)完全对应匹配;
19、所述泊车机器人(25),包括机器人、重载托板(2b)、挡板感应器(2c)、槽型传送履带(2a)、自动挡板(27)、泊车机器人控制系统;机器人主体的上部设有重载托板(2b)用于承载车辆,重载托板(2b)上设置有槽型传送履带(2a),两条槽型传送履带(2a)纵向平行安装在重载托板(2b)上,传送履带两侧的传送履带槽臂(29)高于槽内传送履带平面,起到对车轮的导向稳定作用,传送履带的宽度大于车辆轮胎的宽度;在槽型传送履带(2a)上车辆前后轮停车位的前后端各设置有一个挡板感应器(2c)和自动挡板(27),当车辆进入时,挡板感应器(2c)获取信息并操作前自动挡板(27)立即升起,当车在前自动挡板(27)辅助下稳定停车后,后自动挡板(27)立即升起使前后四个车轮被安全固定;每个泊车机器人(25)都被赋予独有的id编码,在泊车机器人控制系统的控制下泊车机器人(25)安全高效运行。
20、所述的基于上述智能泊车区的运行方法,如下:
21、a入库泊车方法如下:
22、步骤a-1、第一台泊车机器人(25)停在车道槽(26)内待命;第一辆轿车被泊车区车道段上的槽型传送履带(2a)传送到泊车机器人的槽型传送履带(2a)上;
23、步骤a-2泊车机器人(25)的挡板感应器(2c)获取车辆进入信息并操作前自动挡板(27)立即升起,当车在前自动挡板(27)辅助下停稳后,后自动挡板(27)立即升起使车辆前后四个车轮被安全固定;车道槽(26)前后端泊车区车道段上的两自动挡板(27)全部升起,以阻挡任何车辆再进入泊车机器人(25)或空置的车道槽26;
24、泊车机器人(25)载着轿车沿存取车虚拟轨道(23)前行,到达旋转盘(21)虚拟停留区(22)后自动调头,然后继续前行,按照智能停车总控系统智能分配的泊车位id编码自动寻找位置标识器(24)的举升式泊车位(2t);
25、步骤a-3随后泊车机器人维护充电区待命第二台泊车机器人(25)迅速启动到达旋转盘(21)的虚拟停留区(22),对准车道槽(26)然后驶入待命,车道槽(26)前后端泊车区车道段上的两自动挡板(27)自动落下,以便其它泊车区的车辆通行;
26、步骤a-4第一台泊车机器人(25)寻找到位置标识器(24)标识的第一泊车位,按照上述多个举升式泊车位(2t)的运行方法进行泊车,第一台泊车机器人(25)沿存取车虚拟轨道(23)返回,经虚拟停留区(22)后,到达泊车机器人维护充电区待命;
27、步骤a-5泊车区车道段上第二辆轿车被槽型传送履带(2a)传送到泊车机器人的槽型传送履带(2a)上;重复上述步骤2的操作程序车辆被安全固定;
28、随后泊车机器人维护充电区待命第三台泊车机器人(25)迅速启动到达旋转盘(21)的虚拟停留区(22),对准车道槽(26)然后驶入待命,车道槽(26)前后端泊车区车道段上的两自动挡板(27)自动落下,以便其它泊车区的车辆通行;
29、步骤a-6第二台泊车机器人(25)寻找到位置标识器(24)标识的第一泊车位,按照上述多个举升式泊车位(2t)的运行方法进行泊车,第二台泊车机器人沿存取车虚拟轨道(23)返回,经虚拟停留区(22)后,到达泊车机器人维护充电区待命;
30、b出库取车方法如下:
31、步骤b-1客户提取1辆轿车位于立体车库某层、某智能泊车区2、某排、第二泊车位;客户扫取车码或输入车牌号后,在立体车库总控系统的综合管理调度下,提车指令连同该车辆存放的id编码发送到智能泊车区控制系统和电梯控制系统,智能泊车区控制系统把取车命令和车辆存放的id编码发送给出库口维护充电区待命的第一、第二台泊车机器人,依次沿存取车虚拟轨道(23)前行,按照id编码自动寻找到该车辆的位置标识器(24);
32、步骤b-2第一泊车机器人取出第一泊车位的车辆后,沿存取车虚拟轨道(23)继续前行一个车位,为第二泊车机器人让出道路;第二泊车机器人取出第二泊车位的目标车辆后,沿存取车虚拟轨道(23)返回;
33、与此同时,车道槽(26)内的第三台泊车机器人(25)自动驶出,通过旋转盘(21)虚拟停留区(22)后进入维护充电区待命,车道槽(26)前后端泊车区车道段上的两自动挡板(27)全部升起;第二泊车机器人载着目标车辆通过旋转盘(21)虚拟停留区(22)后进入车道槽(26),车道槽(26)前后端泊车区车道段上的自动挡板(27)自动落下,目标车辆被第二泊车机器人上的槽型传送履带(2a)传送上泊车区车道段的槽型传送履带(2a)直奔电梯对接口(16)出库;
34、步骤3第一泊车机器人(25)载着第一泊车位的车辆沿存取车虚拟轨道(23)返回原泊车位入口,按照上述多个举升式泊车位(2t)的运行方法,把原第一泊车位的车辆送入第二泊车位泊车;同时,立体车库总控系统自动调整了该车辆存放的id编码。
35、第五方面,本发明提供一种车库框架结构(1),包括上述智能泊车区(2)、重型楼板(15)、承重外墙(11)、承重内墙(12)、车库山墙(13)、电梯对接口(16)、库内车道(17);车库框架结构(1)前后竖直平行设有2面承重外墙(11),2面承重外墙(11)之间竖直平行设有0-6面或更多面承重内墙(12),左右两端各设有一面车库山墙(13)分别与承重外墙(11)和承重内墙(12)垂直设置;车库框架结构(1)每2-12层为一基础组合,更多层车库框架结构(1)以2-12层相同或不同基础组合的整数倍进行叠加构建,每一层均赋予独有的层id号,每一层的承重外墙(11)和/或承重内墙(12)上均安装有1-7个或更多个重型楼板(15),对应重型楼板(15)设置有1-7个或更多个智能泊车区(2),每个智能泊车区(2)均赋予独有的区id号,每个智能泊车区(2)两端的泊车区车道段相互无缝连接成两条库内车道(17)、且其上的两条槽型传送履带(2a)连接为一个整体,两条库内车道(17)靠近车库山墙(13)设置,每层车库框架结构(1)的两条库内车道(17)对应两端的承重外墙(11)上可设置1-4个电梯对接口(16)可配套设置1-4部智能高效电梯;所述车库框架结构(1)是钢结构或钢筋混凝土结构;优选的,车库框架结构(1)还包括工作电梯(2d),安装在库内车道(17)的一端用于检修维护作业通道。
36、第六方面,本发明提供一种举升式泊车智能立体车库,包括上述车库框架结构(1)、智能高效电梯(3)、立体道路(4)、立体车库总控系统;车库框架结构(1)每2-12层为一基础组合,每一层车库框架结构(1)均设置有1-7个或更多个智能泊车区(2),每座车库框架结构(1)可配套设置1-4部或更多部智能高效电梯(3);智能高效电梯(3)每2-12层为一基础组合,其矩形结构的一侧短边与车库框架结构(1)配套对接、另一侧短边设有1-6个道路对接口、对应有1-6条道路上下架设组成的立体道路(4),智能高效电梯(3)可设置在车库框架结构(1)的外部或内部;更多层车库框架结构(1)和配套的智能高效电梯(3)均以2-12层相同或不同基础组合的整数倍进行叠加构建;在立体车库总控系统的综合管理调度下,举升式泊车智能立体车库高效安全运行;
37、所述立体道路(4)是1-6条道路上下架设组成的立体道路(4),对应h钢塔架电梯井外侧中部设置的1-6个道路对接口,供车辆进出电梯和车库。所述立体道路(4)可以设计成围绕立体车库的一侧面、二侧面、三侧面或四周高架盘旋上升的立体道路结构,以作为更高层立体车库的出入道路,节约土地。优选的,所述立体道路(4)之间的地面空间均可作为车辆维保服务区(4a),充分利用土地;所述举升式泊车智能立体车库由供电系统统一集中供电;
38、所述的智能高效电梯(3),包括h钢塔架电梯井、安全动力机构(30)、托床(36)、配重机构(10)、电机同步器、电梯控制系统;h钢塔架电梯井每2-12层为一基础组合,其每层高度与立体车库的层高匹配,更多层h钢塔架电梯井均是以2-12层基础组合的整数倍进行构建;矩形立体结构的h钢塔架电梯井内设有1-7层矩形结构的托床(36),每层托床(36)的上下边梁之间由桁架结构(39)连接成一个整体结构运行;每层托床(36)由4-8个或更多个安全动力机构(30)安装在h钢塔架电梯井内;矩形结构的h钢塔架电梯井长边中部和对应托床中部安装有配重机构(10);在电梯控制系统的管控下,电机同步器保障每个安全动力机构(30)上的电机同步驱动托床(36)在h钢塔架电梯井内上下安全运行;
39、所述2-12层为一基础组合的举升式泊车智能立体车库配套2-12层为一基础组合的智能高效电梯(3),电梯矩形一侧短边与立体车库配套对接、另一侧短边设有1-6个道路接口对应1-6条道路上下架设组成的立体道路(4),电梯内设置有1-8个托床(36),具有多种基础组合应用;
40、优选基础组合为,每2-12层基础组合的举升式泊车智能立体车库和智能高效电梯,道路接口位于矩形电梯一侧短边的中部,电梯基础组合层数比内设托床层数多1-4层,托床层数比对应的道路数多1-4个;2-12层基础组合智能高效电梯内设有2-8层托床由桁架结构(39)上下连接成一个整体结构,在h钢塔架电梯井内上、下往复仅运行两个行程,每个行程运行相同的1-4层;每个行程始终有1-4层车库和1-4层托床与1-4条道路相互对应连通,使1-4条道路上的车辆可连续直接进出电梯和/或车库;每个行程始终有2-8层托床与2-8层车库相通,使2-8层车库的车辆可同时进出车库和/或电梯。
41、其基础组合如:三层车库及电梯二托床一道路、四层车库及电梯三托床二道路、六层车库及电梯四托床二道路、七层车库及电梯五托床三道路、八层车库及电梯六托床四道路、九层车库及电梯六托床三道路、十层电梯七托床四道路接口、十二层电梯八托床四道路等等,以此类推;
42、七层车库及电梯五托床三道路基础组合的智能高效电梯(3)上或下运行每一个行程仅移动两层,每一个行程始终有三层车库和三层电梯托床与三条道路相互对应连通,使三条道路上的车辆可连续进出车库和/或电梯;每一个行程始终有五层车库与五层托床相通,使对应五层车库的车辆可同时进出车库和/或电梯;每一个行程可有12辆车进出立体道路和车库、16辆车出入或通过电梯,车辆出入库的效率比现有车库提高12倍。
43、优选的,立体车库可设置多部相同基础组合的智能高效电梯(3),当立体车库设置有2部智能高效电梯(3)时,进出车效率可提高2倍。平时运行1部可做为车辆入库电梯,另一部作可为车辆出库电梯;早高峰车辆入库期2部智能高效电梯(3)可同时做为车辆入库电梯,同样晚高峰车辆出库期2部智能高效电梯(3)可同时做为车辆出库电梯,进出车效率可再提高2倍。
44、优选的,立体车库可设置不同基础组合智能高效电梯(3),如“七层车库及电梯五托床三道路”基础组合可配套一部“七层电梯二托床二道路”的电梯组合,七层二托床电梯主要满足非存取高峰时七层立体车库顶部2层和地下2层车辆的存放和取车作业;非存取车高峰时“七层车库及电梯五托床三道路”基础组合的五托床停在电梯底部不动、其五托床上部的三层托床始终与三层车库和三条道路一一对应连通,使三条道路上的车辆直接通过托床进出三层车库泊车或取车;“七层电梯二托床二道路”的二条道路设在地面上两层与立体车库相对应,二层托床在对应七层立体车库的顶部2层、地下2层和对应的两条道路之间上、中、下三个行程高效率运行,满足车辆的入库泊车或出库;此电梯配套组合进一步降低平时运行能耗和成本,节能减排。
45、优选的,特大型举升式泊车智能立体车库可以在上述车库两边车库山墙(13)向两侧扩展,共用中间的原库内车道(17),或可再增加新的库内车道(17)、以及对应电梯和立体道路(4),车辆存放数量和进出车效率将增加3倍。
46、本发明的优点是:
47、1、本发明提出的泊车举升机,既可实现泊车过程中对车辆的抱紧、举升和放下实现全部自动化操作,还实现了纵向多个泊车位并列提升车库泊车量,还可泊车机器人在其内自由通行或多个泊车机器人同时进入泊车举升机的泊车位通道同步作业提高效率,且结构简单,成本低。
48、2.本发明提供的一种举升式泊车智能立体车库,用于轿车或商务乘用车等泊车,存取车效率高、存取车等待时间周期短的多层立体停车解决方案,降低时间成本、节能环保。
49、3、本发明七层为一基础组合的举升式泊车智能立体车库、配套七层为一基础组合的智能高效电梯和五托床对应上下三条道路组成的立体道路,智能高效电梯(3)每一个行程仅运行二层,每一个行程始终有三层托床与三条道路对接使车辆连续进出车库和/或电梯,每一个行程始终有五层托床与五层车库对接使车辆高效进出车库和/或电梯,每一个行程可有12辆车进出立体道路和/或车库、16辆车进出电梯或行使通过电梯,车辆出入库的效率比现有车库提高6-12倍。
50、4、举升式泊车智能立体车库设2部以上相同或不同基础组合的智能高效电梯,既兼顾存取车的高效率又节能降耗,平时可分工为入库和出库电梯,上班高峰可全部作为入库电梯,下班高峰可全部作为出库电梯,比现有电梯进出车效率再提高2倍。
51、5、本发明中七层车库及电梯五托床三道路可配套一部七层电梯二托床二道路,七层二托床电梯主要满足非存取高峰的平时顶2层和地下2层车库车辆的存放和取车作业,非存取高峰的平时七层车库及电梯五托床三道路电梯停在底五层不动即可使中间三层车库的车辆直接连通三条道路进出车,进一步降低平时运行能耗,节能减排。
- 还没有人留言评论。精彩留言会获得点赞!