一种箱梁预制模板系统的制作方法
本申请涉及箱梁施工,尤其涉及一种箱梁预制模板系统。
背景技术:
1、在箱梁的制作过程中通常需要用到大型的模板系统,通过模板中的外模和内模之间限定的空间放置钢筋骨架,再在该空间内浇筑混凝土从而形成具有该钢筋骨架的混凝土梁,即上述的箱梁。
2、为了保证所形成的箱梁的性能,施工时通常会在外模和内模上安装振捣器,一般内模和外模的不同位置会安装多个振捣器。振捣器配合控制器工作,通过控制器能够控制各个振捣器的工作,以便进行混凝土质量控制。
3、一般地,在混凝土浇筑过程中,一般会在外模和内模与混凝土接触的表面处安装振动传感器,从而了解振动情况,再根据振动情况调节振捣器的参数。但是,这种调节方法仅能保证混凝土表面的质量,而无法保证最终制得的整个箱梁的质量。
技术实现思路
1、本发明的一个目的是保证制得的整个箱梁的质量。
2、特别地,本申请实施例提供了一种箱梁预制模板系统,包括:
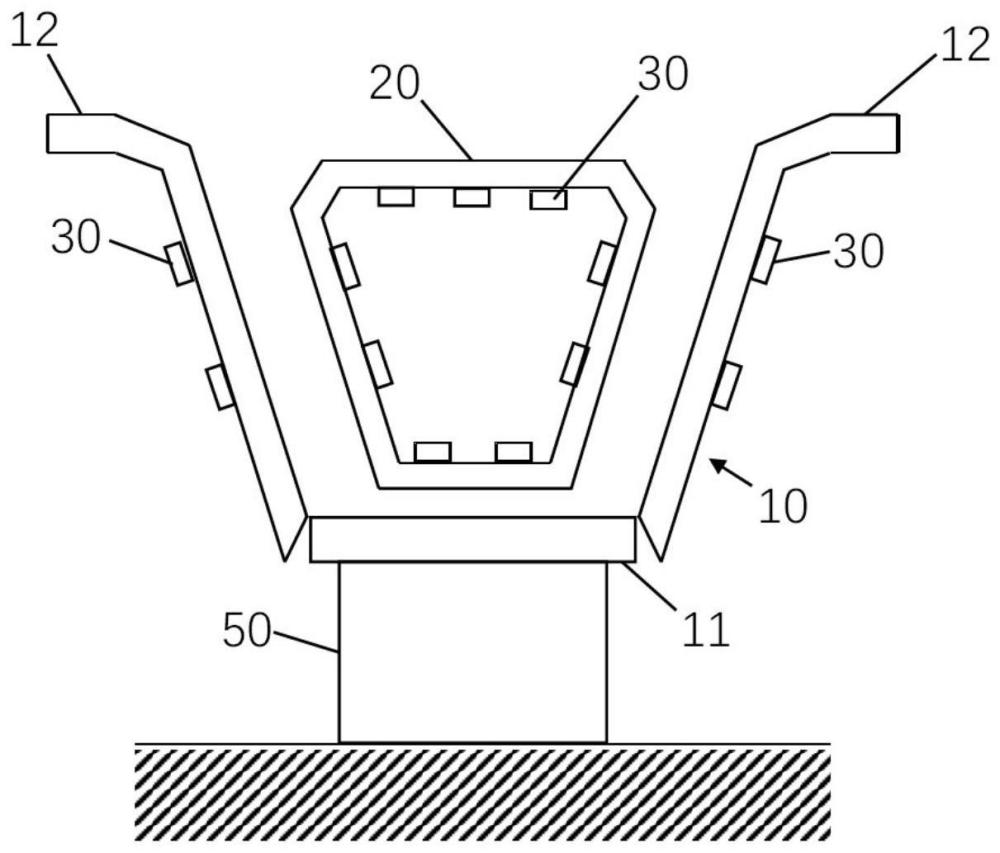
3、外模和内模,所述外模包括底模和位于所述底模两侧的两个侧模,所述外模和所述内模之间形成的空间用于限定箱梁的钢筋骨架,其中,所述内模和两个所述侧模处分别设有多个振捣器,所述振捣器在浇筑混凝土时根据所述混凝土的预设位置处的目标振动能量工作。
4、可选地,每一所述振捣器的振动频率、振动幅度和振动力均可调节。
5、可选地,所述预设位置为位于所述混凝土的底面的宽度方向上的中线上的多个预设点的位置,所述预设点的数量根据所述箱梁的长度确定。
6、可选地,所述内模在纵向和高度方向上分别布置有多个所述振捣器,所述侧模在纵向和高度方向上分别布置有多个所述振捣器。
7、可选地,箱梁预制模板系统还包括:
8、多个沿侧模的纵向依次布置的多个侧模调节支撑螺杆,所述侧模调节支撑螺杆可沿其轴向伸缩且其一端与固定平面形成可转动连接,且至少用于形成支撑所述侧模的工作状态和放倒于所述固定平面的非工作状态,多个所述侧模调节支撑螺杆用于在所述外模和所述内模合模后调节所述侧模的精调。
9、可选地,箱梁预制模板系统还包括:
10、台座,用于支撑所述底模;
11、多个固定件,沿所述底模的纵向依次布置,所述固定件用于依次穿过所述内模的底板、所述钢筋骨架和所述底模后与所述台座固定连接,从而固定所述内模。
12、可选地,箱梁预制模板系统还包括多个沿所述内模的纵向依次布置的反压杠,所述反压杠压设于所述钢筋骨架的顶部,所述反压杠的两端均设有锁扣,并通过所述锁扣可拆卸地连接于所述侧模处。
13、可选地,箱梁预制模板系统还包括:
14、滑触式底座,其顶面处设有滑动面;
15、滑靴,可相对于所述滑动面沿横向往复移动,所述滑靴与所述侧模固定连接;
16、横向液压驱动装置,用于驱动所述滑靴移动;
17、反力架,其两端分别与所述横向液压驱动装置和所述侧模相连。
18、可选地,每一所述预设位置处的目标振动能量与每个所述振捣器的初始振捣能量的关系式如下式表示:
19、
20、其中,eb(j)为第j个预设位置处的目标振动能量,ev(i)为第i个所述振捣器的初始振捣能量,pi为第i个所述振捣器与第j个预设位置的距离,ki为常数系数,p为指数参数。
21、可选地,第i个振捣器的初始振捣能量ev(i)根据以下公式计算:
22、ev(i)=a*aiα*siβ*fiγ+b*sin(wt)
23、其中,ai为第i个所述振捣器的振动幅度,si为第i个所述振捣器的振动频率,fi为第i个所述振捣器的振动力,t为时间,a、b、α、β、γ、w为调节参数。
24、根据本发明的第一方面,根据混凝土的预设位置处的目标振动能量来控制各个振捣器的工作,目标振动能量的设定能够保证各个振捣器在预设位置处的振捣的深度和强度,从而保证最终形成的箱梁在预设位置处的强度和弹性模量,这里的预设位置的选择可以是混凝土内部或表面的各个位置,因此预设位置的合理选择能够实现整个箱梁的强度和弹性模量的整体把控,使得所制得的箱梁具有较高的质量。
25、进一步地,将预设位置选择为混凝土的底面的宽度方向上的中线上的多个预设点的位置,基本上能够保证整个箱梁的质量。并且根据箱梁的长度确定预设位置的数量,能够在箱梁的纵向和高度方向上保证质量。即本实施例通过少量的预设位置的合理选择就能保证箱梁的整体质量。
26、进一步地,通过振捣器的振动幅度、振动频率和振动力的非线性指数项能够更准确地表达实际振捣过程中振捣器参数之间的关系,通过引入正弦函数项这样的周期性元素能够捕捉振动过程中的动态特征,考虑了振捣过程中的周期性变化,使得振捣器的初始振捣能量表达更准确。
27、进一步地,由于振捣器的初始振捣能量传递至预设位置时,会随着距离的增加而衰减,本申请中考虑了这种衰减关系,并且每一振捣器的初始振捣能量对于预设位置的影响可以通过不通的参数ki来体现,使得各个振捣器对于预设位置的目标振捣能量的影响的表达更准确,从而有利于根据目标振捣能量对各个振捣器的参数的准确控制。
28、根据本发明的第二方面,通过设置反压杠和固定件能够在混凝土浇筑过程中防止内模上浮,从而保证箱梁的尺寸要求。通过可拆卸的锁扣设置,可以方便地拆卸反压杠,便于工人操作,能够提高作用效率。
29、根据本发明的第三方面,通过设置可以转动的侧模调节支撑螺杆,该侧模调节支撑螺杆在使用时竖直放置,不使用时可以放倒于地面。因此在不使用时不需要再运走或移走该侧模调节支撑螺杆,节省了劳动力和成本。
技术特征:
1.一种箱梁预制模板系统,其特征在于,包括:
2.根据权利要求1所述的箱梁预制模板系统,其特征在于,每一所述振捣器的振动频率、振动幅度和振动力均可调节。
3.根据权利要求2所述的箱梁预制模板系统,其特征在于,所述预设位置为位于所述混凝土的底面的宽度方向上的中线上的多个预设点的位置,所述预设点的数量根据所述箱梁的长度确定。
4.根据权利要求3所述的箱梁预制模板系统,其特征在于,所述内模在纵向和高度方向上分别布置有多个所述振捣器,所述侧模在纵向和高度方向上分别布置有多个所述振捣器。
5.根据权利要求1-4中任一项所述的箱梁预制模板系统,其特征在于,还包括:
6.根据权利要求5所述的箱梁预制模板系统,其特征在于,还包括:
7.根据权利要求6所述的箱梁预制模板系统,其特征在于,还包括多个沿所述内模的纵向依次布置的反压杠,所述反压杠压设于所述钢筋骨架的顶部,所述反压杠的两端均设有锁扣,并通过所述锁扣可拆卸地连接于所述侧模处。
8.根据权利要求1-4中任一项所述的箱梁预制模板系统,其特征在于,还包括:
9.根据权利要求2-4中任一项所述的箱梁预制模板系统,其特征在于,每一所述预设位置处的目标振动能量与每个所述振捣器的初始振捣能量的关系式如下式表示:
10.根据权利要求9所述的箱梁预制模板系统,其特征在于,第i个振捣器的初始振捣能量ev(i)根据以下公式计算:
技术总结
本发明提供了一种箱梁预制模板系统,属于箱梁施工技术领域。箱梁预制模板系统包括:外模和内模,所述外模包括底模和位于所述底模两侧的两个侧模,所述外模和所述内模之间形成的空间用于限定箱梁的钢筋骨架,其中,所述内模和两个所述侧模处分别设有多个振捣器,所述振捣器在浇筑混凝土时根据所述混凝土的预设位置处的目标振动能量工作。本发明的箱梁预制模板系统能够保证制得的整个箱梁的质量。
技术研发人员:何前途,尹建坤,贾军军,庾艺凡,段庚顺,管飞
受保护的技术使用者:中交一公局第二工程有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!