墙面施工系统的制作方法
本技术涉及建筑机械,具体地涉及一种墙面施工系统。
背景技术:
1、传统的建筑施工操作(例如,抹灰操作、墙面打磨操作等)较依赖人工,对建筑工人的技术水平要求较高,而随着人力成本的上升和建筑工人老龄化趋势的加剧,墙面施工机器人将逐步代替人工进行相应的建筑施工操作。
2、墙面施工机器人在对墙面进行建筑施工操作之前,通常需要先进行调平。现有的墙面施工机器人的调平过程主要依赖激光投线仪,即,将激光投线仪发射的平行于理想墙面的激光线构成的激光线束面作为调平的参考基准,并通过安装在墙面施工机器人上的图像传感器对激光线进行拍照,以进行调平。然而,当环境中的光线较强时,图像传感器往往难以识别出激光投线仪发射的激光线,因此存在环境适应性不高的问题。
技术实现思路
1、本实用新型实施例的目的是提供一种墙面施工系统,以解决现有技术存在的环境适应性不高的问题。
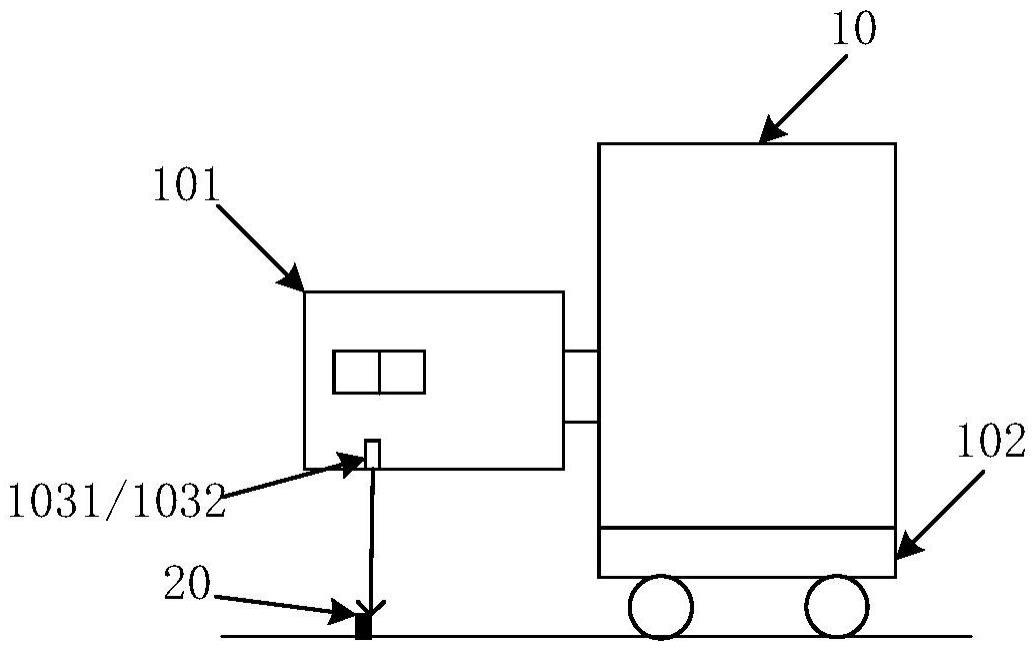
2、为了实现上述目的,本实用新型实施例提供一种墙面施工系统,包括:
3、墙面施工机器人,包括用于墙面施工的工作装置和支撑工作装置的底盘,工作装置或底盘上设置有朝向向下的第一距离传感器和第二距离传感器;以及
4、标识物,设置于墙面施工机器人所处的地面上,标识物的高度大于预设高度阈值,标识物的长度大于第一距离传感器和第二距离传感器之间的距离。
5、在本实用新型实施例中,底盘上设置有升降装置,工作装置设置于升降装置上。
6、在本实用新型实施例中,升降装置与底盘通过滑轨连接,以实现升降装置相对于底盘的前后移动。
7、在本实用新型实施例中,工作装置上设置有多个第三距离传感器,第三距离传感器朝向工作装置的前侧。
8、在本实用新型实施例中,底盘包括多个滑轮和与滑轮对应的轮毂电机。
9、在本实用新型实施例中,底盘的底部设置有多个底盘调平电缸。
10、在本实用新型实施例中,墙面施工机器人还包括倾角传感器。
11、在本实用新型实施例中,墙面施工机器人为抹灰机器人,工作装置包括喷头和抹灰面板。
12、在本实用新型实施例中,标识物包括方管、水平尺以及带水平仪的靠尺中的至少一项。
13、在本实用新型实施例中,第一距离传感器和第二距离传感器为激光测距传感器,第三距离传感器为超声波测距传感器。
14、上述墙面施工系统,通过在墙面施工机器人的工作装置或底盘上设置有朝向向下的第一距离传感器和第二距离传感器,并在墙面施工机器人所处的地面上设置有标识物,标识物的高度大于预设高度阈值,标识物的长度大于第一距离传感器和第二距离传感器之间的距离,从而能够使得第一距离传感器和第二距离传感器能够同时检测到标识物,当第一距离传感器和第二距离传感器同时触发的时候则表明墙面施工机器人调平成功。该墙面施工系统不需要依赖激光投线仪和图像传感器,且第一距离检测装置和第二距离检测装置均朝向下发射距离检测信号,因此可以避免受到环境中强光的影响,使得墙面施工机器人在较亮环境下仍能完成调平动作,提高了墙面施工机器人的环境适应性,保障了墙面施工机器人的作业质量。
15、本实用新型实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种墙面施工系统,其特征在于,包括:
2.根据权利要求1所述的墙面施工系统,其特征在于,所述底盘上设置有升降装置,所述工作装置设置于所述升降装置上。
3.根据权利要求2所述的墙面施工系统,其特征在于,所述升降装置与所述底盘通过滑轨连接,以实现所述升降装置相对于所述底盘的前后移动。
4.根据权利要求1所述的墙面施工系统,其特征在于,所述工作装置上设置有多个第三距离传感器,所述第三距离传感器朝向所述工作装置的前侧。
5.根据权利要求1所述的墙面施工系统,其特征在于,所述底盘包括多个滑轮和与所述滑轮对应的轮毂电机。
6.根据权利要求1所述的墙面施工系统,其特征在于,所述底盘的底部设置有多个底盘调平电缸。
7.根据权利要求1或6所述的墙面施工系统,其特征在于,所述墙面施工机器人还包括倾角传感器。
8.根据权利要求1所述的墙面施工系统,其特征在于,墙面施工机器人为抹灰机器人,所述工作装置包括喷头和抹灰面板。
9.根据权利要求1所述的墙面施工系统,其特征在于,所述标识物包括方管、水平尺以及带水平仪的靠尺中的至少一项。
10.根据权利要求4所述的墙面施工系统,其特征在于,所述第一距离传感器和第二距离传感器为激光测距传感器,所述第三距离传感器为超声波测距传感器。
技术总结
本技术实施例提供一种墙面施工系统,属于建筑机械技术领域。该墙面施工系统包括:墙面施工机器人,包括用于墙面施工的工作装置和支撑工作装置的底盘,工作装置或底盘上设置有朝向向下的第一距离传感器和第二距离传感器;以及标识物,设置于墙面施工机器人所处的地面上,标识物的高度大于预设高度阈值,标识物的长度大于第一距离传感器和第二距离传感器之间的距离。本技术实施例可以提高墙面施工机器人的环境适应性。
技术研发人员:付玲,尹莉,成海平,罗仙亿,佘玲娟,刘硕
受保护的技术使用者:中联重科股份有限公司
技术研发日:20230524
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!