一种建筑预制构件表面清扫装置的制作方法
本技术涉及一种建筑预制构件表面清扫装置,属于建筑预制构件生产。
背景技术:
1、预制隔墙板属于一种建筑预制构件,预制隔墙板是一种重要的建筑材料,凭借其质量更轻、施工效率更高,从而使建筑自重减轻,基础承载力变小,可有效降低建筑造价。同时其具有强度较高、隔热、防水等性能,可锯、可刨、可钻,符合建筑的多样性要求。
2、目前的大多数的隔墙板是由模具挤压而成,隔墙板经挤压而成后还需要经过养护、干燥、打包等处理。隔墙板在经过多道工序的处理后,隔墙板的表面会滞留较多杂屑以及夹杂一些松散的颗粒,在打包处理之前需要对隔墙板的表面进行清洁,目前的清洁工作大多数是通过人工手持清洁器对隔墙板的表面进行清洁。
3、专利号为cn202221835641.5的专利,公开了一种预制隔墙板生产用清洁装置,该装置包括机架,机架的上端设有由第一电机驱动正反转的输送带;龙门架的上端跨越输送带设置有龙门架,龙门架上滑动连接有由升降组件驱动升降的连接座,连接座的下端沿前后方向水平间隔布置有两个清扫盘,两个清扫盘由第二驱动机构驱动同步旋转;连接座的下端位于清扫盘的右侧沿前后方向间隔布置有多个第一吹风罩;连接座的下端的四周环绕设置有集尘罩,集尘罩连通有吸尘泵,吸尘泵的出口连通有收集箱。本实用新型既能将隔墙板快速且高效的进行清洁,又可以将清洁过程中产生的粉尘进行收集,降低粉尘对工作环境的污染。
4、上述专利虽然可以实现清洁功能,目前技术考虑不全面,具有以下弊端:
5、但是在进行预制隔墙板清洁时,传统的预制隔墙板生产用清洁装置不能根据预制板的厚度进行变化匹配,通用性较差。
6、亟待一种建筑预制构件表面清扫装置,利用预制构件厚度测量机构测量得到建筑预制构件的厚度数值,然后适应性的调节可调式上表面清扫机构的高度,进而优化建筑预制构件上表面的清扫效果。
技术实现思路
1、为解决上述问题之一,根据以上现有技术中的不足,本实用新型要解决的技术问题是:如何实现利用预制构件厚度测量机构测量得到建筑预制构件的厚度数值,然后适应性的调节可调式上表面清扫机构的高度,进而优化建筑预制构件上表面的清扫效果,为此提供一种建筑预制构件表面清扫装置。
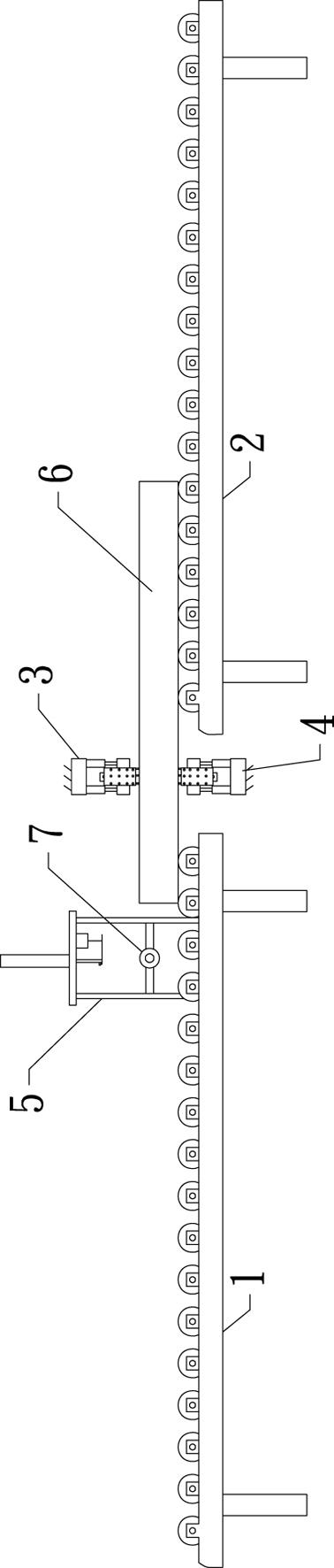
2、本实用新型所述的建筑预制构件表面清扫装置,建筑预制构件表面清扫装置,包括用于转运建筑预制构件的上游输送平台和下游输送平台,所述上游输送平台后接下游输送平台,所述下游输送平台承接上游输送平台送料,其特征在于,所述上游输送平台的中部安装有用于测量建筑预制构件厚度的预制构件厚度测量机构,所述上游输送平台和下游输送平台之间安装有用于清理建筑预制构件下表面的固定式下表面清扫机构,所述固定式下表面清扫机构的上方设置有用于清理建筑预制构件上表面的可调式上表面清扫机构,所述可调式上表面清扫机构与固定式下表面清扫机构之间形成供建筑预制构件通过的通道。本实用新型利用预制构件厚度测量机构测量得到建筑预制构件的厚度数值,然后适应性的调节可调式上表面清扫机构的高度,进而优化建筑预制构件上表面的清扫效果。
3、优选地,所述预制构件厚度测量机构包括安装在上游输送平台一侧的气缸安装架,所述气缸安装架的顶部安装有竖向设置的气缸和拉线位移传感器,所述拉线位移传感器和气缸均处于建筑预制构件的上方,所述拉线位移传感器的拉线与气缸的伸缩端连接,在所述气缸的伸缩端还安装有行程开关,所述建筑预制构件行进至预制构件厚度测量机构的下方时,驱动气缸的伸缩端下行,让气缸的活塞杆伸出拉动拉线位移传感器的拉线,直至让气缸活塞杆底端的行程开关碰触到建筑预制构件的上表面后,然后控制气缸回缩复位,拉线位移传感器的拉线被拉动时产生的位移由拉线位移传感器进行检测记录,初始状态下气缸伸缩端到上游输送平台上表面的高度减去拉线被拉动时产生的位移,即为测量出对应建筑预制构件大致的高度,然后适应性的调节可调式上表面清扫机构的高度,进而优化建筑预制构件上表面的清扫效果。
4、优选地,所述气缸顶层安装架的底部安装有来料传感器,所述来料传感器用于检测建筑预制构件是否到达预设位置,若是,则控制气缸伸长,通过来料传感器、行程开关均与来料控制器的信号输入端电性连接,来料控制器通过第一电磁阀控制气缸的伸长,可以进一步提高设备的自动化水平,进而提高生产效率,具体流程为:来料传感器检测到建筑预制构件的来料,通过第一电磁阀控制气缸的伸长,让气缸的活塞杆伸出拉动拉线位移传感器的拉线,直至让气缸活塞杆底端的行程开关碰触到建筑预制构件的上表面后,然后通过第一电磁阀控制气缸回缩复位,拉线位移传感器的拉线被拉动时产生的位移由拉线位移传感器进行检测记录。
5、优选地,所述可调式上表面清扫机构包括顶层安装架以及通过升降气缸悬挂在顶层安装架下方的换向轮安装架,所述换向轮安装架的两端分别安装有换向皮带轮a和换向皮带轮b,清扫皮带的两端分别绕过换向皮带轮a、换向皮带轮b与双出头气缸的两伸出端连接,所述换向轮安装架上表面的中部安装有驱动清扫皮带往复运动的双出头气缸,所述清扫皮带的外侧面上设置有刷毛。通过双出头气缸控制清扫皮带运动,实现刷毛对建筑预制构件上表面的清理。
6、优选地,所述换向轮安装架的长度方向与上游输送平台的输送方向垂直。
7、优选地,所述来料控制器通过第二电磁阀控制升降气缸的伸长及回缩,进而调整换向轮安装架的高度,可以进一步提高设备的自动化水平,进而提高生产效率。
8、优选地,所述来料控制器为plc可编程控制器或单片机。
9、优选地,所述上游输送平台包括多组沿输送方向等距排布的输送辊组,输送辊组采用减速电机驱动。
10、优选地,所述下游输送平台的结构与上游输送平台的结构相同。
11、本文中,所述来料控制器、拉线位移传感器、行程开关、来料传感器仅是对其功能的一个简单使用,并不涉及方法程序等的改进。
12、与现有技术相比,本实用新型具有以下有益效果:
13、本实用新型所述的建筑预制构件表面清扫装置,利用预制构件厚度测量机构测量得到建筑预制构件的厚度数值,然后适应性的调节可调式上表面清扫机构的高度,进而优化建筑预制构件上表面的清扫效果。
14、本实用新型所述的建筑预制构件表面清扫装置,驱动气缸的伸缩端下行,让气缸的活塞杆伸出拉动拉线位移传感器的拉线,直至让气缸活塞杆底端的行程开关碰触到建筑预制构件的上表面后,然后控制气缸回缩复位,拉线位移传感器的拉线被拉动时产生的位移由拉线位移传感器进行检测记录,初始状态下气缸伸缩端到上游输送平台上表面的高度减去拉线被拉动时产生的位移,即为测量出对应建筑预制构件大致的高度,然后适应性的调节可调式上表面清扫机构的高度,进而优化建筑预制构件上表面的清扫效果。
15、本实用新型所述的建筑预制构件表面清扫装置,所述换向轮安装架的两端分别安装有换向皮带轮a和换向皮带轮b,清扫皮带的两端分别绕过换向皮带轮a、换向皮带轮b与双出头气缸的两伸出端连接,所述换向轮安装架上表面的中部安装有驱动清扫皮带往复运动的双出头气缸,所述清扫皮带的外侧面上设置有刷毛,通过双出头气缸控制清扫皮带运动,实现刷毛对建筑预制构件上表面的清理。
- 还没有人留言评论。精彩留言会获得点赞!