一种带擦窗框功能的擦窗机器人的制作方法
[0001]
本发明涉及清洁装置领域,具体涉及一种带擦窗框功能的擦窗机器人。
背景技术:
[0002]
现代建筑的构成,玻璃的外墙或玻璃窗户都十分常见。但由此带来难以清洁的问题。
[0003]
一般的居家建筑,清洁玻璃窗的内表面十分简单,但清洁玻璃窗的外表面则十分困扰,因为居民难以在高空环境爬到玻璃窗的外侧进行清洁。目前市面上有一种电动的擦窗机器人,通过吸附装置吸附在玻璃窗表面,并以行走系统移动实现玻璃表面的清洁。但现有技术中的这种擦窗机器人智能清洁玻璃,并不能清洁窗框,因此窗框还是长年累月地积聚灰尘。室内侧的窗框尚且可以自行手动清洁,但对于室外侧的窗框而言,一旦开窗,户外的风很容易将窗框上的灰尘重新吹入。可见现有技术的擦窗机器人清洁效果未如理想。
[0004]
不难看出,现有技术还存在一定的缺陷。
技术实现要素:
[0005]
本发明所要解决的技术问题是提供一种带擦窗框功能的擦窗机器人,可以清洁玻璃表面的同时,还能清洁窗框。
[0006]
为实现上述目的,本发明采用以下技术方案:
[0007]
一种带擦窗框功能的擦窗机器人,其设有安装于外壳内部的控制单元,外壳内部朝正面安装有作用于玻璃表面的吸附装置和行走系统,外壳的正面表面还装设有用于擦拭玻璃的抹布和刮水条,外壳的外围还设有四边感应装置,还包括一个设于外壳背面边缘的擦窗框组件;擦窗框组件包括伸缩电机、驱动轴、驱动连杆、从动连杆、基板及擦拭棉;伸缩电机安装于外壳上且与控制单元连接,驱动轴的两端与外壳旋转连接且驱动轴与伸缩电机传动连接;基板的两侧分别与驱动连杆及从动连杆的顶端旋转连接,且从动连杆的底端与外壳旋转连接,两条驱动连杆的底端分别传动连接于驱动轴的两端,使基板、驱动连杆及从动连杆组成平行四边形杆组;擦拭棉粘合于固定基板的底面。
[0008]
进一步的,所述基板包括盖板、滑轨、底板;滑轨固定安装于盖板的底面两侧,底板通过滑轨滑动可装拆连接,擦拭棉粘合固定于底板的底面。
[0009]
进一步的,所述盖板的边缘装设有测距雷达,测距雷达与控制单元连接。
[0010]
进一步的,所述底板与擦拭棉之间装设有压力开关,压力开关与控制单元连接。
[0011]
进一步的,所述外壳的边缘设有用于容纳擦窗框组件的容纳腔,伸缩电机、驱动轴、驱动连杆、从动连杆及擦拭棉收纳于容纳腔中,且基板与容纳腔的顶部及外侧面配合,使擦窗框组件收纳时基板将容纳腔的顶部及外侧面完全遮蔽。
[0012]
进一步的,所述伸缩电机及驱动轴之外罩设有防水罩。
[0013]
本发明提供的一种带擦窗框功能的擦窗机器人,具有以下优点:
[0014]
能够实现擦玻璃的同时,实现清洁窗框,清洁效果更加全面;
[0015]
使用方法与普通的擦窗机器人完全相同,擦窗框组件可以收纳,不占用过多空间;
[0016]
擦窗框组件可以自动调节高低、伸出距离,以适应窗框的尺寸;
[0017]
擦拭棉可以拆卸清洗,维护简单方便。
附图说明
[0018]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0019]
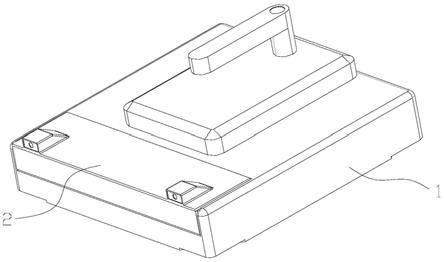
图1为本发明实施例提供的一种带擦窗框功能的擦窗机器人的整体结构示意图。
[0020]
图2为擦窗框组件的分解结构示意图。
[0021]
附图标记说明:
[0022]
1、外壳
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2、擦窗框组件
[0023]
3、伸缩电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4、驱动轴
[0024]
5、驱动连杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6、从动连杆
[0025]
7、擦拭棉
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8、盖板
[0026]
9、滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10、底板
[0027]
11、测距雷达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12、防水罩
具体实施方式
[0028]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例和附图,对本发明实施例中的技术方案进行清楚、完整地描述。需要说明的是,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0029]
实施例
[0030]
请参阅图1至图2,本发明提供了一种带擦窗框功能的擦窗机器人,其与现有技术一样设有安装于外壳1内部的控制单元,外壳1内部朝正面安装有作用于玻璃表面的吸附装置和行走系统,外壳1的正面表面还装设有用于擦拭玻璃的抹布和刮水条,外壳1的外围还设有四边感应装置。
[0031]
除此以外还包括一个设于外壳1背面边缘的擦窗框组件2;擦窗框组件2包括伸缩电机3、驱动轴4、驱动连杆5、从动连杆6、基板及擦拭棉7;伸缩电机3安装于外壳1上且与控制单元连接,驱动轴4的两端与外壳1旋转连接且驱动轴4与伸缩电机3传动连接;基板的两侧分别与驱动连杆5及从动连杆6的顶端旋转连接,且从动连杆6的底端与外壳1旋转连接,两条驱动连杆5的底端分别传动连接于驱动轴4的两端,使基板、驱动连杆5及从动连杆6组成平行四边形杆组;擦拭棉7粘合于固定基板的底面。
[0032]
本发明如现有技术的普通擦窗机器人一样,具有清洁玻璃表面的功能。具体是通过吸附装置产生负压使擦窗机器人整个吸附在玻璃表面,再通过控制单元的算法,使行走系统以特定的轨迹驱动行走,从而擦拭整面玻璃。当然,这里不区分擦窗机器人是充电式的
还是接电式的,如果是充电式的还应装设蓄电池。另外还有一些必要的装置如:安全绳等,能够实现的擦玻璃功能如:边缘检测、路径自动计算、清洁完成自动回归原点等,都与本发明的技术重点无关,在此不作赘述。
[0033]
本发明的技术重点在于擦窗框组件2。控制单元的算法可以进行窗框擦拭,一般是擦玻璃前。擦窗机器人会先靠近窗框,这个以现有的四边感应装置即可做到,然后以擦窗框组件2一侧对准该窗框,控制伸缩电机3转动,通过驱动轴4带动驱动连杆5摆转。由于驱动连杆5、从动连杆6及基板为一个平行四边形杆组,因此在驱动连杆5摆转时,基板会向外平动伸出。平动伸出的过程中,基板先升高,然后再伸出下降。因此基板的伸缩能够同时适应高度和伸出距离调节。
[0034]
作为优选,所述基板包括盖板8、滑轨9、底板10;滑轨9固定安装于盖板8的底面两侧,底板10通过滑轨9滑动可装拆连接,擦拭棉7粘合固定于底板10的底面。底板10可以滑动装拆,故擦拭棉7可以自由拆除并清洗维护。
[0035]
为了配合上述动作,优选的,所述盖板8的边缘还装设有测距雷达11,测距雷达11与控制单元连接。所述底板10与擦拭棉7之间还装设有压力开关,压力开关与控制单元连接。压力开关优选设有至少两个,分布在底板10的内外侧。
[0036]
擦窗机器人靠近并以擦窗框组件2对准窗框时,测距雷达11能够检测到窗框外侧的障碍物,如土建墙体等。根据四边感应装置与测距雷达11反馈的结果,能够计算出窗框的厚度:
[0037]
1)如果计算出的厚度为零,则表明测距雷达11测得的障碍物就是窗框本身,即窗框的高度过高,超出了擦窗框组件2的可擦拭高度,擦窗框组件2就不会工作,会自动放弃擦拭窗框。
[0038]
2)如果测距雷达11并没有反馈结果,表明窗框外侧并无障碍物。那么行走系统会基于四边感应装置感应的窗框位置,先控制擦窗机器人调整距离进行校准,然后再驱动伸缩电机3使基板伸出。待擦拭棉7压在窗框的表面,压力开关会反馈感应信号。行走系统沿着窗框行走即可擦拭窗框实现清洁。
[0039]
3)如果计算出的结果为正数,那么窗框的厚度和具体位置就确定了。与第2)种情况类似地,先进行距离校准,再伸出基板使擦拭棉7压在窗框表面即可。只是距离校准不仅要基于窗框的位置,还要基于外侧障碍物的位置进行算法调整。
[0040]
擦拭棉7自身厚度较大,且柔软,基本能根据不同高度的窗框适应调整,这大大降低了擦窗框组件2的工作难度。
[0041]
作为优选,所述外壳1的边缘设有用于容纳擦窗框组件2的容纳腔,伸缩电机3、驱动轴4、驱动连杆5、从动连杆6及擦拭棉7收纳于容纳腔中,且基板与容纳腔的顶部及外侧面配合,使擦窗框组件2收纳时基板将容纳腔的顶部及外侧面完全遮蔽。
[0042]
容纳腔提供了擦窗框组件2的容纳空间,使平时擦窗框组件2整体不会外凸,也使产品整体更美观。更进一步的,所述伸缩电机3及驱动轴4之外优选罩设有防水罩12,以实现伸缩电机3等部件的遮蔽,更好地保护其不受外部污染,且不会因擦拭棉7所携带的水分而造成电动部件短路。
[0043]
本发明所提供的一种带擦窗框功能的擦窗机器人,能够实现擦玻璃的同时,实现清洁窗框,清洁效果更加全面,避免灰尘重新进入室内造成污染。且使用方法与普通的擦窗
机器人完全相同,擦窗框组件2可以收纳,不占用过多空间。擦窗框组件2可以自动调节高低、伸出距离,以适应窗框的尺寸。擦拭棉7可以拆卸清洗,维护简单方便。
[0044]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1