一种智能洗碗机及其洗碗方法与流程
[0001]
本发明涉及一种智能家电设备,尤其涉及一种智能洗碗机及其洗碗方法。
背景技术:
[0002]
现代生活节奏快,对智能化需要日益增加。洗碗是每个家庭生活中需要面对的事情,虽然每次手工洗碗花费的时间不多,但是长年累计起来时间就不少,尤其是现代生活节奏加快以及科技日益发达,人们普通希望对于一些日常生活中的一些事务可以利用科技节省时间。
[0003]
现有技术中,通常的洗碗机是将待洗碗具放入洗碗机,然后对洗碗机中的碗具以喷淋方式进行统一冲洗、烘干。这种洗碗机虽然在欧美比较普及,但是在亚洲普及率较低。在实现本发明的过程中,发明人发现除了价格因素,还因为目前洗碗机存在诸多不足之处:
[0004]
第一,不太适合亚洲的碗具。目前洗碗机的主流还是以喷淋方案,这种方案比较适合西餐盘子。而亚洲国家普遍采用碗具,碗底较深,加上碗具比较油腻,因此采用喷淋方案不易洗干净。实际上因为洗碗机无法在亚洲消费者中形成口碑,因此普及率不高。
[0005]
第二,洗涤和烘干效率欠佳。目前洗碗机的一个标准程序大约在两个多小时,洗涤的时间较长。耗电指标也不令人满意。
[0006]
第三,烘干效率低。目前洗碗机内烘干效率低、时间长,碗具、篮架、内壁等烘干需要消耗较多能源。
[0007]
第四,洗涤剂问题。现有洗碗机为了弥补洗涤效率低问题,因此需要采用专用的洗碗机洗涤剂来帮助清洗餐具。而为了消除高温烘干产生的黄色水斑,要用软化盐等处理水质。这些专用洗涤剂会对环境产生污染,专用洗涤剂比较昂贵,增加了洗碗成本。
[0008]
第五,碗具搬运问题。现有洗碗机只能洗碗不能存碗,因此需要先将碗逐个摆进去,清洗完成后又要将碗逐个拿出来放到碗柜,比起手工洗碗多了“摆”和“取”两个过程。取碗的过程中还会产生二次污染。目前亚洲城市家庭厨房并不宽敞,增加洗碗机会挤占厨房空间。
技术实现要素:
[0009]
本发明公开了一种智能洗碗机,采用与目前洗碗机不同的方法对碗具进行洗涤,通过对每一个碗具进行单独的识别、拾取、清洗,实现了高效率清洗碗具。
[0010]
本发明实施例公开了一种智能洗碗机,包括:
[0011]
待洗碗工区,用于将待洗碗具倒扣放置,及在待洗碗工区清洗碗底或碗具背面,之后将碗具从其背面拾起,送至清洗装置,
[0012]
清洗装置,用于清洗碗具内部和/或碗具背面,清洗装置设置在清洗工区内或待洗碗工区内,
[0013]
洗净碗工区,用于放置洗净的碗具。可选地,所述智能洗碗机附带碗具或指定使用配套碗具;和/或,所述碗具上有图形编码;和/或碗具中心有定标点;和/或碗底略成弧形;
使得碗具倒扣时碗底的水向碗脚流动,和/或碗脚上有缺口,使得碗底的水易于流出碗底。
[0014]
可选地,所述智能洗碗机还包括精密机械移动装置,所述精密机械移动装置前端安装真空吸盘综合系统或电吸盘综合系统,该系统有吸盘能够拾取与释放碗具。可选地,真空吸盘综合系统的吸盘内有抽气孔和管道,通过管道吸气拾取碗具,通过管道与大气相通或向吸盘送气,释放碗具。
[0015]
可选地,真空吸盘综合系统还包括喷水口用于喷射水,和/或还包括喷气口用于喷射气,以对碗具背面进行清洗,和/或还包括吸水口用以清洗工作台面;和/或,抽气孔、抽水口、喷水口和喷气口分别与外部的气管和水管相接;和/或,利用电磁阀实现气管/水管、气孔/水孔的互相隔离和复用。
[0016]
可选地,所述真空吸盘综合系统上安装电子距离感应器和/或机械感应开关,用来感应吸盘与碗具的距离和吸盘是否与碗具接触;和/或,真空吸盘综合系统上安装摄像头和/或照明灯具;和/或,感应器、摄像头、照明灯具安装在吸盘内;和/或,吸盘与高频振动器相连或合二为一设计,将高频振荡传递给待洗碗具;和/或,真空吸盘综合系统包括的超声波振子的紧固螺杆为中空形式,形成能通水通气的管道。
[0017]
可选地,所述智能洗碗机为三工区结构,包括待洗碗工区、洗碗区和洗净碗工区,待洗碗工区和洗净碗工区为多种碗具纵横放置;所述清洗装置位于待洗碗工区和/或洗碗工区;在待洗碗工区先清洗碗具背面,然后利用精密机械移动装置和真空吸盘综合系统拾取碗具,将碗具移送到清洗装置作进一步清洗;清洗完成后,精密机械移动装置和真空吸盘综合系统将碗具从水槽中移出,放置在洗净碗工区;或者,待洗碗工区和洗净碗工区水平并列放置,称为平面型三工区结构,或者洗净碗工区位于待洗碗工区上方,称为立体型三工区结构。
[0018]
可选地,所述三工区结构为水槽结构,其中,第一个水槽为待洗碗工区,待洗碗具纵横、倒扣放置在该水槽中,先清洗待洗碗具背面,然后利用精密机械移动装置拾取碗具,将碗具移送到第二个水槽作进一步清洗;第二个水槽为洗碗区,安装洗碗装置;清洗完成后,精密机械移动装置将碗具从水槽中移出,放置在水槽临近位置的工作台面或水槽附近的碗柜/碗架。可选地,所述智能洗碗机为二工区结构,包括:待洗碗工区和洗净碗工区,所述待洗碗工区和洗净碗工区为多种碗具纵横放置;所述清洗装置安置在待洗碗工区;在待洗碗工区先清洗碗具背面,然后利用精密机械移动装置和真空吸盘综合系统拾取碗具,将碗具移送到清洗装置作进一步清洗;清洗完成后,精密机械移动装置和真空吸盘综合系统将碗具从水槽中移出,放置在洗净碗工区;或者,待洗碗工区和洗净碗工区水平并列放置,称为平面型两工区结构,或者洗净碗工区位于待洗碗工区上方,称为立体型两工区结构。
[0019]
可选地,所述二工区结构为水槽式结构,所述待洗碗工区包括一个或两个水槽,待洗碗具纵横、倒扣放置在所述水槽中,清洗装置插放在待洗碗工区中;碗具洗净后由精机机械移动装置将碗具放置到洗净碗工区;洗净碗工区或者为另一空闲水槽,或者为水槽附近的工作台面或水槽附近的碗柜/碗架。
[0020]
可选地,所述智能洗碗机的精密机械移动装置为机械臂,所述机械臂由上立臂、横向臂、下垂臂和摆动臂组成,和/或,上立臂之下为水平转轴和俯仰转轴,和/或,不洗碗时,机械臂的底部模块水平旋转电机掉电,以使得机械臂能够水平手动旋转,和/或上立臂和横向臂的旋转电机保持结束时状态;和/或,机械臂前端安装真空吸盘综合系统用于清洗、拾
取或放置碗具。
[0021]
可选地,所述碗柜或碗架位于水槽相临墙面上,用于放置洗净碗具。
[0022]
可选地,所述待洗碗具和洗净碗具分别放置在抽屉式结构中,以方便拿取;和/或,立体型工区结构中,洗碗工区与洗净碗工区之间的隔板能够上下移动。
[0023]
可选地,精密机械移动装置将碗具放置在洗净碗工区后,利用精密机械移动装置前端的真空吸盘综合系统,向碗具背面喷射高温气体,进一步将碗具背面干燥。
[0024]
可选地,所述智能洗碗机还包括碗具工位综合系统,所述碗具工位综合系统设置碗具工位标识,所述碗具工位标识包括腕托和/或凹槽,用于引导碗具摆放,和/或,所述碗具工位综合系统设置防倾倒杆,和/或,所述碗具工位综合系统设置腕托,并能带动碗具升降和旋转。
[0025]
可选地,所述清洗装置为组合清洗臂,所述组合清洗臂包括水平旋转喷臂和/或垂直喷臂,和/或柱状喷头;所述垂直喷臂在所述水平旋转喷臂的两头,柱状喷头在水平旋转喷臂的中间;水平旋转喷臂边旋转边喷水/气,将碗具清洗干净。
[0026]
可选地,所述清洗装置由一系列线状排列喷头组成,喷口喷射方向向上。
[0027]
可选地,所述清洗装置由清洗槽组成,清洗槽能够盛水并安装超声波振子,利用超声波清洗碗具,清洗槽底部和/或侧面有喷口能够喷射水流清洗水槽中的碗具。
[0028]
可选地,所述清洗装置采用喷射高速水/气来清洗/干燥碗具,和/或,所述智能洗碗机中安装热水储气罐/储气罐,以弥补热水量/高压气量的不足。
[0029]
本发明实施例提供一种智能洗碗方法,应用于上述任一项所述的智能洗碗机,包括:
[0030]
精密机械移动装置将碗具拾起后,放入洗碗机的水槽中,精密机械移动装置上的超声波振子或高频振动器,带动碗具振动,将碗具水洗干净;和/或,精密机械移动装置将碗具带离水面,利用精密机械移动装置上的高频振动器,将碗具高效干燥。
[0031]
本发明实施例提供一种智能洗碗方法,应用于上述水槽式智能洗碗机,包括:所述水槽底部和/或侧面设立超声波振子,水槽注水,碗具倒扣地浸泡在待洗碗水槽里,对碗具进行超声波预清洗,之后排出待洗碗具水槽的水;先对碗具的背面进行进一步清洗烘干,然后用吸盘拾取碗具,并由机械臂将碗具搬运到清洗水槽,浸泡在水中,利用清洗水槽底部的超声波振子将碗具清洗干净,或者利用吸盘综合系统中的超声振子带动碗具振动,将碗具清洗干净,然后机械臂将碗具移到洗净碗放置位置。
[0032]
本发明实施例提供一种智能洗碗方法,应用于上述水槽式智能洗碗机,包括:待洗碗具倒扣堆叠放置在待洗碗工区,在水槽中注水,机械臂将吸盘综合模块压放在最上面的待洗碗具上或吸住最上面的待洗碗具,吸盘综合模块中的超声波振子或高频振动器振动,带动水槽中水和堆叠碗具振动,从而达到清洗水槽内碗具效果。
[0033]
本发明实施例提供一种智能洗碗方法,应用于上述水槽式智能洗碗机,利用所述机械臂及其上的真空吸盘综合系统清洗水槽。
[0034]
本发明实施例提供一种智能洗碗方法,应用于上述智能洗碗机,在洗碗机侧壁设置喷头,碗具垂直或碗具上方略为向侧壁倾斜,喷头的出水覆盖碗具中心附近及碗具下方,通过碗具旋转,清洗碗具。
[0035]
本发明实施例提供一种清洗厨房用具的方法,包括:厨房用具进行编码,并将物理
尺寸植入厨房用具数据库,厨房用具上设置图形码编码/参考点标识/方向标识,增大水槽机械臂水平运动范围到工作台面,利用机械臂上真空吸盘综合系统上的相机来识别厨房用具上的图形码/参考点标识/方向标识,吸盘或机械手将所述厨房用具移动到水槽进行清洗。本发明引入物联网、精密机械、图像识别、近距离喷射和超声波(或高频振动)洗涤等技术,并较好地解决了与本发明原理相配套的一系列技术问题,例如碗具的标准化、识别、碗具的简便拾取、碗具拾取前对碗具背面的清洗、多碗具工区结构、高效率清洗(如超声波喷头、超声波吸盘)和烘干、合理紧凑的整体结构等,给出了一种能够产品化的智能洗碗机方案。同时,进一步将水槽洗碗机拓展到水槽清洗。
附图说明
[0036]
图1为本发明实施例配套碗具建模及编码示意图;
[0037]
图2为本发明实施例配套碗具物联网标识示意图;
[0038]
图3为本发明实施例真空吸盘示意图;
[0039]
图4为本发明实施例洗碗机三维精密机械移动装置示意图;
[0040]
图5a为本发明实施例洗碗机待洗碗工位综合系统示意图;
[0041]
图5b为本发实施例中待洗碗具放置抽屉中的示意图;
[0042]
图6a、图6b及图6c是本发明实施例洗碗工区碗具清洗装置或清洗模块示意图;
[0043]
图7为本发明实施例一种平面式洗碗机工区布局示意图;
[0044]
图8为本发明实施例一种立体式洗碗机工区布局示意图;
[0045]
图9a为本发明实施例一种平面型两工区洗碗机示意图;
[0046]
图9b为本发明实施例一种立体型两工区洗碗机示意图;
[0047]
图10a和图10b为本发明实施例水槽洗碗机示意图。
具体实施方式
[0048]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0049]
在阐述本发明实施例之前,需要说明的是,为简洁起见,本发明实施例中在叙述中可能会出现一些简化,例如:
[0050]
1、本发明实施例叙述中“清洗”或“洗涤”在很多情况中表示用添加洗涤剂的热水清洗碗具,并将碗具烘干。
[0051]
2、本发明实施例叙述中“碗”和“碗具”通常指碗和盘子,有时也包含其它餐具,例如“搬运式洗碗方法”,其中的“碗”就包含“碗、盘子和细长的筷子、刀叉等餐具”。
[0052]
3、本发明实施例示意图中编号如801a、801b、801c、801d等往往表示同一类型的部件,此外这些部件可能都存在,可能部分存在。在叙述中有时为了简洁起见,叙述时可能统一称为801。
[0053]
4、碗具“底部”有时不仅仅指碗具底部,还包括碗具的碗脚。碗具的“背面”很多情况下包含碗具外侧面、碗底、碗脚和碗口。碗具的“内部”可包含碗具内侧和碗口。碗口属于
非常细致的考虑,可以归到碗具背面,也可以归到碗具内部。本发明已经考虑了碗具的各个部分,但为简洁起见,在并非关键点的情况下,我们笼统地进行叙述,例如清洗碗具背面,可能仅仅是清洗碗底,或者是清洗碗底加碗脚,或者是清洗碗底、碗脚和碗具外侧,或者是清洗碗底、碗脚、碗具外侧面、碗口。
[0054]
5、本发明例针对真空吸盘进行说明,所述原理也适用于电磁吸盘。因此相关权利要求延伸到采用电磁铁洗碗机。
[0055]
6、利用“/”符合表示“和/或”,例如“a/b/c”,表示“a和/或b和/或c”。
[0056]
7、本发明考虑了超声波振荡器与高频振动器的互换性。高频振动器如电动机械方式和电磁驱动方式。
[0057]
在本发明实施例中,提供的一种智能洗碗机,包括:碗具的定制。碗具定制是本发明实现的基础,通过碗具的定制可以实现洗碗机碗具确定化、标准化,大大减少了本发明智能洗碗机的不确定因素,也确保碗具摆放稳定。通过碗具工位标识、腕托、编码、碗具标识,使得碗具的摆放位置预先确定。本发明洗碗机内安装摄像头和照明灯具,特别是在精密机械移动装置上安装可移动的摄像头和照明装置,使得非本洗碗机的碗具能够被检查、识别和报警,放错位置的碗具或没有被正常放置的碗具能够被检查、识别和报警。本专利的这些发明,是实现商用化家用智能洗碗机的重要前提。本发明洗碗机配备事先建模的碗具,每一种碗具对应特定编码(图像编码或电子标签),编码设置在碗具上。有对应的传感器识别编码,例如用摄像头来设备图像编码例如二维码。
[0058]
在本发明实施例中,提供一种智能洗碗机,包括:
[0059]
待洗碗工区,用于将待洗碗具倒扣放置及清洗碗底或碗具背面,之后碗具从其背面被拾起,送至清洗装置,
[0060]
清洗装置,用于清洗碗具内部和/或碗具背面,清洗装置设置在清洗工区内或待洗碗工区内,
[0061]
洗净碗工区,用于放置洗净的碗具。
[0062]
在本发明实施例中,所述智能洗碗机附带碗具或指定使用配套碗具。所述碗具上有图形编码,和/或碗具中心有定标点,和/或碗底略成弧形,使得碗具倒扣时碗底的水向碗脚流动,和/或碗脚上有缺口,使得碗底积水容易排泄出去。
[0063]
在本发明实施例中,所述智能洗碗机还包括精密机械移动装置,所述精密机械移动装置前端安装真空吸盘综合系统,该系统有吸盘能够拾取与释放碗具。其中,真空吸盘综合系统的吸盘内有抽气孔和管道,通过管道吸气拾取碗具,通过管道与大气相通或向吸盘送气,释放碗具。真空吸盘综合系统还包括喷水口,用于喷射水或喷气口用于喷射气,对碗具背面进行清洗,和/或还包括吸水口用以清洗工作台面;和/或,抽气孔、抽水口、喷水口和喷气口分别与外部的气管和水管相接;和/或,利用电磁阀实现气管/水管、气孔/水孔的互相隔离和复用。将喷水口和喷气口设置在吸盘中,使得真空吸盘综合系统更加简洁。
[0064]
本发明实施例中先将碗具底部或背面清洗干净,也是实现商用化家用智能洗碗机的重要前提。只有将碗具底部或背面洗干净,才便于从底部或背面拾起碗具。此时可以利用吸盘拾起和放下碗具,这种方式比采用机械手拾起碗具要简便得多,成本也低很多。
[0065]
所述吸盘上安装电子距离感应器和/或机械感应开关,用来感应吸盘与碗具的距离和吸盘是否与碗具接触;和/或,吸盘与高频振动器相连或合二为一设计,将高频振荡传
递给待洗碗具;和/或,吸盘综合系统包括的超声波振子的紧固螺杆为中空形式,形成能通水通气的管道;和/或,吸盘上安装摄像头,用以识别碗具编码;和/或,在吸盘上安装照明灯具。本发明将喷水口、喷气口、感应器、摄像头、照明灯等设置在吸盘内,结构更加紧凑。本发明实施例将各种感应元件和电子元件设置在吸盘中,可使得真空吸盘综合系统更加简洁。摄像头能够识别碗具的类型、判断碗具的干净程度、判断碗具现场是否正常。利用摄像头来进行综合识别,特别是进行报警,也是实现商用化家用智能洗碗机的重要前提,因为智能洗碗机在实际使用中,由于人工出错或其它未知的因素(例如碗具断裂成两半),导致洗碗机处于非正常状态,此时启动洗碗机可能会导致洗碗机严重损坏,因此洗碗机具有纠错能力是十分重要的。为简洁起见,本专利只讨论真空吸盘,但本发明的相关权利要求依然适用于电吸盘。
[0066]
在本发明实施例中,所述智能洗碗机为三工区结构,包括待洗碗工区、洗碗区和洗净碗工区,待洗碗工区和洗净碗工区为多种碗具纵横放置;所述清洗装置位于待洗碗工区和/或洗碗工区;在待洗碗工区先清洗碗具背面,然后利用精密机械移动装置和真空吸盘综合系统拾取碗具,将碗具移送到清洗装置作进一步清洗;清洗完成后,精密机械移动装置和真空吸盘综合系统将碗具从水槽中移出,放置在洗净碗工区;或者,待洗碗工区和洗净碗工区水平并列放置,称为平面型三工区结构,或者洗净碗工区位于待洗碗工区上方,称为立体型三工区结构。其中,待洗碗和洗净碗为多碗具纵横放置,是实现商用化家用智能洗碗机的一个重要前提。所述三工区结构为水槽式结构,其中,第一个水槽为待洗碗工区,待洗碗具纵横、倒扣放置在该第一水槽中;先清洗待洗碗具背面,然后利用精密机械移动装置拾取碗具,将碗具移送到第二个水槽作进一步清洗;第二个水槽为洗碗区,安装洗碗装置;清洗完成后,精密机械移动装置将碗具从水槽中移出,放置在水槽临近位置的工作台面或水槽附近的碗柜/碗架。所述碗柜或碗架位于水槽相临墙面上,用于放置洗净碗具,所述待洗碗具和洗净碗具分别放置在抽屉式结构中,以方便拿取。
[0067]
在本发明实施例中,所述智能洗碗机为二工区结构,包括:待洗碗工区和洗净碗工区,所述待洗碗工区和洗净碗工区为多种碗具纵横放置;所述清洗装置安置在待洗碗工区;在待洗碗工区先清洗碗具背面,然后利用精密机械移动装置和真空吸盘综合系统拾取碗具,将碗具移送到清洗装置作进一步清洗;清洗完成后,精密机械移动装置和真空吸盘综合系统将碗具从水槽中移出,放置在洗净碗工区;或者,待洗碗工区和洗净碗工区水平并列放置,称为平面型两工区结构,或者洗净碗工区位于待洗碗工区上方,称为立体型两工区结构。所述二工区结构为水槽式结构,所述待洗碗工区包括一个或两个水槽,待洗碗具纵横、倒扣放置在所述水槽中,清洗装置插放在待洗碗工区中;
[0068]
碗具洗净后由精机机械移动装置将碗具放置到洗净碗工区;洗净碗工区或者为另一空闲水槽,或者为水槽附近的工作台面或水槽附近的碗柜/碗架。所述碗柜或碗架位于水槽相临墙面上,用于放置洗净碗具,所述待洗碗具和洗净碗具分别放置在抽屉式结构中,以方便拿取;和/或,立体型工区结构中,洗碗工区与洗净碗工区之间的隔板能够上下移动。
[0069]
在本发明实施例中,所述智能洗碗机的精密机械移动装置为机械臂,所述机械臂由上立臂、横向臂、下垂臂和摆动臂组成,和/或,上立臂之下为水平转轴和俯仰转轴,和/或,不洗碗时,机械臂的底部模块水平旋转电机掉电,以使得机械臂能够水平手动旋转,和/或上立臂和横向臂的旋转电机保持结束时状态;和/或,机械臂前端安装真空吸盘综合系统
用于清洗、拾取或放置碗具。本发明实施例中,机械臂既是智能水槽洗碗机拾取碗具的工具,又要兼顾水槽水龙头的角色。
[0070]
拓展地,水槽洗碗机机械臂还可以清洗水槽。
[0071]
拓展地,将水槽洗碗机的机械臂的活动扩展到整个工作台面,并在机械臂前端安装清洗装置,能够清洗工作台面、清洗工作台面的物品如洗菜中转框和整理工作台上的东西。拓展地,将水槽洗碗机的机械臂的活动扩展到烹调锅位置,并在机械臂前端安装锅铲和机械手,能够进行烹调工作。
[0072]
拓展地,将水槽洗碗机的机械臂的活动范围扩展到冰箱位置,并在机械臂前端安装机械手,机械臂可以开关冰箱、从冰箱中拿出物品或将物品放入冰箱中。
[0073]
在本发明实施例中,精密机械移动装置将碗具放置在洗净碗工区后,利用精密机械移动装置前端的真空吸盘综合系统,向碗架背面喷射高温气体,进一步将碗具背面干燥。在清洗碗具内部时,不可避免会重新打湿碗具背面。解决的办法之一是将洗净碗具放置在洗净碗工位后,再一次将碗具背面干燥,形成清洗碗具的完备系统。
[0074]
在本发明实施例中,所述智能洗碗机还包括碗具工位综合系统,所述碗具工位综合系统设置碗具工位标识,所述碗具工位标识包括腕托和/或凹槽,用于引导碗具摆放,和/或,所述碗具工位综合系统设置防倾倒杆,和/或,所述碗具工位综合系统设置腕托,并能带动碗具升降和旋转。
[0075]
在本发明实施例中,所述清洗装置为组合清洗臂,所述组合清洗臂包括水平旋转喷臂和/或垂直喷臂,和/或柱状喷头;所述垂直喷臂在所述水平旋转喷臂的两头,柱状喷头在水平旋转喷臂的中间;水平旋转喷臂边旋转边喷水/气,将碗具清洗干净。所述清洗装置由一系列线状排列喷头组成,喷口喷射方向向上。
[0076]
在本发明实施例中,所述清洗装置由清洗槽组成,清洗槽能够盛水并安装超声波振子,利用超声波清洗碗具,清洗槽底部和/或侧面有喷口能够喷射水流清洗水槽中的碗具。
[0077]
在本发明实施例中,所述清洗装置采用喷射高速水/气来清洗/干燥碗具,和/或,所述智能洗碗机中安装热水储气罐/储气罐,以弥补热水量/高压气量的不足。
[0078]
在本发明实施例中,还提供一种应用于上述智能洗碗机的洗碗方法,包括:精密机械移动装置将碗具拾起后,放入洗碗机的水槽中,并由精密机械移动装置上的超声波振子或高频振动器,带动碗具振动,将碗具水洗干净;和/或,精密机械移动装置将碗具带离水面,利用精密机械移动装置上的高频振动器,将碗具高效干燥。
[0079]
在本发明实施例中,还提供一种应用于上述水槽式智能洗碗机的洗碗方法,包括:所述水槽底部和/或侧面设立超声波振子,水槽注水,碗具倒扣地浸泡在待洗碗水槽里,对碗具进行超声波预清洗,之后排出待洗碗具水槽的水;先对碗具的背面进行进一步清洗烘干,然后用吸盘拾取碗具,并由机械臂将碗具搬运到清洗水槽,浸泡在水中,利用清洗水槽底部的超声波振子将碗具清洗干净,或者利用吸盘综合系统中的超声振子带动碗具振动,将碗具清洗干净,然后机械臂将碗具移到洗净碗放置位置。
[0080]
在本发明实施例中,还提供一种应用于上述水槽式智能洗碗机的洗碗方法,包括:待洗碗具倒扣堆叠放置在待洗碗工区,在水槽中注水,机械臂将吸盘综合模块压放在最上面的待洗碗具上或吸住最上面的待洗碗具,吸盘综合模块中的超声波振子或高频振动器振
动,带动水槽中水和堆叠碗具振动,从而达到清洗水槽内碗具效果。
[0081]
本发明实施例提供一种智能洗碗方法,应用于上述水槽式智能洗碗机,利用所述机械臂及其上的真空吸盘综合系统清洗水槽。
[0082]
本发明实施例提供一种智能洗碗方法,应用于上述智能洗碗机,在洗碗机侧壁设置喷头,碗具垂直或碗具上方略为向侧壁倾斜,喷头的出水覆盖碗具中心附近及碗具下方,通过碗具旋转,清洗碗具。
[0083]
本发明实施例还提供一种清洗厨房用具的方法,包括:将厨房用具进行编码,并将物理尺寸植入洗碗机数据库,厨房用具上设置图形码编码/参考点标识/方向标识,增大水槽机械臂水平运动范围到工作台面,利用机械臂上真空吸盘综合系统上的相机来识别厨房用具上的图形码/参考点标识/方向标识,吸盘或机械手将所述厨房用具移动到水槽进行清洗。本发明实施例洗碗机的简明工作流程之一如下:
[0084]
将不同型号的待洗碗倒扣放入待洗碗工区的各自工位,待洗碗工区综合系统与三维精密机械移动装置承载吸盘综合模块及附属清洗模块,先清洗并烘干碗具的底面和外侧面。接着吸盘及清洗模块拾取碗具,并借助三维精密机械移动装置将碗具带到碗具清洗工区,与洗碗区的清洗模块互动将碗具的内表面和外侧面洗净、烘干。最后组合吸盘及清洗模块将洗净碗具倒扣放置在清洁碗工区的对应工位。洗碗机每次取一个碗、洗一个碗、放一个碗,完成一次洗碗过程。重复以上过程就可以将所有的待洗碗具清洗完毕。
[0085]
由于待洗碗具和已经洗好的碗具是分层隔开的,洗碗机具有洗碗和储碗的功能,一机两用,解决了目前洗碗机洗碗之后还要将碗搬运到碗柜的麻烦,也避免了在搬运过程中的二次污染。此外,洗碗的时间基本上与洗碗的数量呈线性关系,碗具少,洗碗的时间也就短。
[0086]
本发明实施例洗碗机采用与目前洗碗机完全不同的原理来进行洗涤,也就是对每一个碗具进行单独的识别、拾取、清洗和烘干,解决了中式及亚洲碗具的高效清洗问题。由于洗涤和烘干效率大幅提高,使得洗碗时间上显著缩短,用水量、用电量和洗涤剂用量减少,因此本发明洗碗机具有智能和绿色环保特点。新颖的洗碗和碗柜合二为一结构消除了碗具二次搬运带来的人力工作和二次污染隐患,减少了厨具占用面积。
[0087]
本发明引入物联网、精密机械、图像识别、近距离喷射和超声波洗涤等技术,并较好地解决了与本发明原理相配套的一系列技术问题,例如碗具的标准化、识别、碗具的简便拾取、碗具拾取前对碗具背面的清洗、多碗具工区结构、高效率清洗(如超声波喷头、超声波吸盘)和烘干、合理紧凑的整体结构等,给出了一种能够产品化的智能洗碗机方案。
[0088]
下面结合具体的实施例附图,对本发明实施例作进一步阐述。
[0089]
图1为本发明实施例配套碗具建模及编码示意图。根据目前日常生活的特点,精心设计几种不同大小的盘子和碗,这些盘子和碗基本能够满足日常的生活绝大部分的场景需求,并作为洗碗机的标准配套碗具。每种碗具都进行尺寸测量、建模和编码,例如,如图1所示,背面1601、1602、1603分别表示三种不同的碗具。
[0090]
建模和编码信息一方面会植入智能洗碗机的微电脑之中形成数据库,另一方面将编码信息以图形码和电子标签形式设计在对应的碗具上以便于识别。这样,当洗碗机读入一个碗具的编码,就可以在内部已有的数据库中找到想对应的碗具数据和模型,然后选择与之对应的程序进行拾取、搬运、清洗、烘干和摆放。
[0091]
洗碗机配套碗具使得商业化的洗碗机成为可能,精心设计碗具,使得吸盘与各种碗具彼此优化匹配,吸盘能够牢靠拾取各种型号的碗具;也使得碗具能够平稳堆叠,并且在满足使用功能的前提下堆叠高度尽量低。碗具上的编码和定位信息确保洗碗机使得洗碗机工作更加可靠。
[0092]
图2为本发明实施例配套碗具物联网标识示意图。本发明实施例洗碗机提供配套碗具,配套的碗具在保证功能和美观的前提下,如图2所示,将碗具50的底部和侧面设计成微凸光滑面511便于真空吸盘拾取,同时使得水流向碗脚512,碗脚有缺口513,这样便于碗具倒扣时碗底积水流出。
[0093]
本发明实施例将碗具的编码以各种图形码的形式做在碗具上。所选用的图形码可以是条码230,二维码231,碗底中心有定位标识234。
[0094]
图3为本发明实施例真空吸盘综合系统/模块(或简称吸盘综合系统/模块,或简称组合吸盘模块)30示意图,电磁铁吸盘与之类似(没画出),实际应用中选择其中一种方式即可。
[0095]
如图3所示,吸盘综合模块30有吸盘302。吸盘上有光学识别镜头305,可识别图形码、碗具清洗前后的干净程度、碗具的状态(例如是否歪斜、是否破裂、是否有非正常摆放的碗具)。照明灯300为光学镜头305提供照明,可根据需要打开或关闭。接近感应器306,可感知吸盘与碗具的距离是否足够接近。红外或激光测距仪309,可测定到碗具的距离,使得清洗模块能在最佳距离清洗碗具。当吸盘触及或拾取碗具时,机械接近开关307能被多级触发。将真空吸盘综合系统上的各种感应器、摄像头和照明设置在吸盘内,能够使得真空吸盘综合系统更加紧凑。显然,上述部件设置在吸盘外是常规考虑。
[0096]
真空发生器311通过电磁阀314与吸盘302的内孔304相通,通过抽气及放气,可以拾取或释放碗具。
[0097]
吸盘综合模块的喷口304还可喷射高温水或气清洁和烘干碗具,或清洁和烘干洗碗机内部部件。喷口304与真空发生器311、高温水泵312、高温气泵313相连,电磁阀314、315、316提供管道的通断和管道之间隔离,使得不同的管道能够复用,避免管道过多。当通道复用,喷口也复用。显然,每个喷口享有单独的通道也是可行的。将真空吸盘综合系统上的喷水口、喷气口设置在吸盘内,能够使得真空吸盘综合系统更加紧凑。显然,上述部件设置在吸盘外是常规考虑。
[0098]
此外,显然吸盘内还可以添加吸水口,以及与吸气口相应的管道,有关吸水口与吸水管道的设计安排、权利要求与吸气口相同。
[0099]
吸盘综合模块30能够旋转。因此当吸盘30拾取碗具之后,能够带动碗具旋转,这样与洗碗工位的清洗模块配合,可以更加灵活地将碗具洗净。
[0100]
更进一步,吸盘综合模块30能够高频振荡,例如利用吸盘模块30上的超声波振动器(或高频振动器)303带动吸盘综合模块30形成高频震荡,使得碗具表面的污物爆裂脱离碗具或将碗具上的水抖动掉,达到高效清洗或干燥碗具的目的。显然因为碗具直接与吸盘接触,超声波振子/高频振动器303应安装在与吸盘最近的地方,这样清洗碗具效果最佳,放在其它地方再传递给碗具效果差一些,但不影响采用高频振荡清洗干燥碗具的实质。一种高频振动器是采用微型电机带动偏心的负载高速旋转,或者采用电磁振荡。
[0101]
图4为本发明实施例智能洗碗机三维精密机械移动装置41示意图,它是转轴420、
直线滑台421和多轴精密机械臂422组成的三维精密移动平台,可以把安装在其上的附属清洗装置410和(真空)吸盘综合模块30准确地送到指定位置。附属清洗装置410上有喷射口4101,能够喷射水流和气流,(真空)吸盘综合模块见图3的实施例,也就是吸盘还集成了抽气、喷气清洗、喷水清洗、识别、感应及超声波振动等综合功能,超声波振子(或高频振动器)303安装位置尽量靠近吸盘。显然,能够选择类似图6c的中空超声波振子,使得水流、气流能够穿过超声波振子的内部到达吸盘,或者将吸盘与超声振子合二为一,例如,在超声振子的“帽檐”处加吸盘的弹性橡胶。
[0102]
在本发明实施例中,精密机械移动装置由直线运动装置、伸缩运动装置、旋转运动装置及机械臂组成,用于承载负载例如吸盘和碗具,当机械臂占主要成分时,精密机械移动装置简称机械臂。精密机械移动装置前端有附属洗碗装置和吸盘综合模块。显然可以将吸盘综合模块的一些功能转移到附属清洗模块上,例如镜头、超声波振子以及感应器,甚至在附属清洗装置上增加一个环状吸盘或环状喷嘴,这些都在本发明考虑之列。为了使得本发明叙述简单,本发明不对附属清洗装置进行展开,而设定附属清洗装置具有吸盘综合模块相同的清洗、传感和识别功能。
[0103]
图5a是本发明实施例智能洗碗机待洗碗工位综合系统44示意图。
[0104]
如图5a所示,碗具52a、52b、52c倒扣叠放在托板441上,托板441固定在圆筒440上,且圆筒440比托板441高。圆筒440外有一圈竖杆,即防倾斜杆449,还可以作为放置碗具的标识。圆筒440、托板441和防倾斜杆449之间形成凹陷4401,该凹陷4401也可作为放置碗具的标识,引导用户放置适当的碗具。同时,圆筒440能尽可能地防止洗碗水打湿其内部部件;防倾斜杆449则主要起到防止堆叠碗具52a、52b、52c倾斜的作用,其可以固定在托板441上。圆筒440、凹陷4401、防倾斜杆449具有相同的中心轴44z。
[0105]
防倾斜杆449为一圈分离的竖直立杆,其内侧所围起来的口径比碗具开口略大,既不会妨碍碗具上下运动和旋转,又能有效防止堆叠的碗具倾斜,其材质具有一定弹性,其上部450微微外倾,使放入碗具时具有更多冗余量便于碗具放入。
[0106]
碗托444的外表面和碗具内部具有相似的形状,可以很好地贴合碗具,其旋转对称轴44z。用户根据腕托444的形状大小也可以直观判定对应的碗具。腕托内的旋转机构445可带动碗具52a、52b、52c绕待洗碗工位综合系统44中心对称轴44z旋转。升降器443可以抬升和下降,带动腕托444、旋转机构445以及堆叠碗具52a、52b、52c上升和下降。升降器443底板可安放超声波振子448,带动碗具52a、52b、52c震动,从而增强对碗具52a、52b、52c的清洗和烘干效果。在简化情形,无升降装置443及碗托444,碗具浸泡在水中,超声波振子4481可以清洗待洗碗具。腕托444的中心有参考点标识和图形码,表明是某个碗具的腕托。腕托444上也可以安装超声波或高频发生器447,带动碗具52a、52b、52c震动,从而增强对碗具52a、52b、52c的清洗和烘干效果。待洗碗工区和洗净碗工区综合系统基本相同,不同之处是洗净碗工区综合系统没有超声波振子448、447。
[0107]
图5b为本发实施例中待洗碗具放置抽屉中的示意图,如图5b所示,待洗碗具放置在类似于抽屉的盒子里913k,便于用户拉出和推进洗碗机。为了保证在工作时水管通路的连接,外接的水管913f固定安装在洗碗机上,待洗碗抽屉913k有与之相配的接头913m,两者之间可通过插拔连接。可用同样的插拔方式解决电源的连接。
[0108]
图6a、图6b及图6c是本发明实施例洗碗工区碗具清洗装置或清洗模块示意图。吸
盘从碗具底部将碗具拾起,然后移动到清洗工位的碗具清洗模块处进行清洗。清洗模块的编号为70,在图6a、图6b及图6c中该编号下的清洗子模块分别为清洗模块71、72和73。
[0109]
图6a的清洗模块71为碗具55a倒扣清洗方式,其中,吸盘30从碗具底部551拾取碗具,碗口朝下,旋转喷头71位于碗具55a的下方,其水流入口为710。旋转喷头71a由三部分组成,第一部分是中间凸起喷头711,能产生顶向水流714a和侧向水流714b。第二部分是平行延展的旋臂712,方便产生偏向上方的水流714c。第三部分是伸到碗具外并折起的部分713,产生向内的水流714d,便于清洗碗具外侧。
[0110]
旋转喷头71上的一部分喷口设计成倾斜形状,利用高压水流和旋臂712、713产生旋转力矩,带动旋转喷头71一边喷射水/气,一边自身旋转;或者由电机驱动旋转喷臂71旋转。
[0111]
可以选择旋转喷头71不动,吸盘综合模块30带动碗具55旋转和直线运动,结合吸盘综合模块30上超声波振子303带动碗具55超声波振动,将碗具清洗干净。
[0112]
图6b为另一种清洗模块72示意图。吸盘综合模块30将碗具56搬移到洗碗工区的清洗模块72处。清洗模块72有超声波清洗槽7194,清洗槽7194的底部和侧面分别有超声波振子73a和73b和喷口714b,碗具56浸泡在水里7197,利用清洗槽中的超声波将碗具56洗净。
[0113]
或者结合利用吸盘综合模块30上的超声波振子(高频振荡器,其余亦同)303,直接带动碗具56a振动,辅助喷口714的冲刷,将碗具56a洗净。
[0114]
或者将多个碗具56同时放入清洗槽中,结合超声波振子73和超声波振子303的共同作用,以及喷口714的冲刷,将多个碗具同时洗净,然后由吸盘综合模块30将碗具56一一搬走,放入洗净碗工区。清洗槽有阀门,打开可将清洗槽中的水及残渣放掉。显然,筷子和刀叉也可以放入一个便于吸盘拾取的篓子里,通过吸盘将篓子放入清洗槽中清洗。
[0115]
图6c是本发明实施例超声波喷头73示意图。压电晶体614夹在前端金属导体612和后端金属导体613之间,前端金属块613是超声波发射端,压电晶体信号输入端615和616,螺杆611将前段金属612和后端金属613夹紧。本发明实施将螺杆611做成中空形式,使得流体能够通过螺杆611贯穿整个超声波振子,从喷口619中喷出,形成超声波喷头。特别地,在螺杆611中安装旋转喷头618,当流体从喷口619喷射出来时,喷头618产生旋转,形成旋转喷头。通过以上措施,使得图3的超声波振子既能产生超声波振动,又能旋转喷射水流等流体物质。
[0116]
选择地,超声波喷头发射端顶端有“帽檐”620,并在发射端增加螺纹617。在水槽的底部和侧壁上打孔,其孔径与螺纹617相当或稍大,但远小于帽檐620孔径,这样就可以通过螺母6173,将超声波喷头安装到水槽90的底部和侧面,密封胶圈6171和6172起防水作用,防滑垫片6174可防止螺母6173振动松脱。需要说明的是,采用图3的帽檐、螺纹及螺母将超声波喷头安装固定在水槽上是关键所在,而采用密封胶圈密封和防滑垫片紧固则是常规处理措施之一。
[0117]
当采用机械高频振动器或电磁高频振动器时,实现高频振动和通水/通气将十分容易。
[0118]
图7是本发明实施例一种三工区平面转移式洗碗机工区布局俯视示意图,所谓三工区是指有单独的待洗碗工区、洗碗工区、洗净碗工区。
[0119]
待洗碗具56a等放置在洗碗机一侧的,也即待洗碗工区91。中间是洗碗工区92。洗
干净的碗具56b等放置在洗碗机的另一侧,也就是洗净碗工区93。待洗碗工区和洗净碗工区中,不同型号碗具的纵横放置。为防止洗净碗被二次污染,洗碗工区92和洗净碗工区93之间安装可伸缩隔离装置923。
[0120]
待洗碗具56a和洗净碗具56b分别放置在工位综合系统44a和44b上。洗碗工区有清洗模块70。在待洗碗工区也同样能安装清洗模块70p,这样能够部分清洗碗具。如果清洗模块70p能够完全清洗碗具,则洗碗工区92可以省去,三工区洗碗机变成两工区洗碗机。
[0121]
三维精密机械移动装置41承载辅助清洗装置和吸盘综合系统30。
[0122]
图8是本发明实施例一种三工区立体式洗碗机工区布局前向示意图,其特征是洗碗机为上下结构,下层为待洗碗工区91(91c、91d),放待洗碗具。上层为洗净碗工区93(93c、93d),放洗净碗具。待洗碗工区和洗净碗工区可以是类似图7的纵横布置。洗碗工区92贯穿上下层。同样,待洗碗工区和洗净碗工区可以做成抽屉结构。
[0123]
一种三区立体式洗碗机结构实例为下层待洗碗工区91分别位于洗碗工区92的两边91c和91d,带洗碗具倒扣着放在该工区的对应工位综合系统44c1和44d1中,并且可以像“抽屉”一样拉出和推回去,这样很方便放置待洗碗具。
[0124]
上层之一为洗净碗工区93,也分别位于洗碗工区92的两边93c和93d,洗净碗具倒扣着放在该工区的对应工位综合系统44c2和44d2中,并且可以像“抽屉”一样拉出和推回去,这样很方便取出和放置洗净碗具。为了在“抽屉”拉出来时前端有支撑力,和现有洗碗机类似,“抽屉”的面板可以翻倒,能够支撑“抽屉”中的拉篮(未画出)。在待洗碗工区91,精密机械移动装置41承载吸盘综合模块30清洗碗具56c1背面并吸取碗具,然后将碗具搬运到洗碗工区,并与碗具清洗模块70配合互动,将碗具清洗。最后将洗净的碗具搬运到洗净碗工区中,碗具放置如56c2。在清洗碗具内部时,碗具的背部可能会重新打湿。因此当精密机械移动装置将洗净碗具放置完毕之后,利用吸盘综合模块上的喷嘴,喷射高速高温气体,将碗具背面重新干燥。
[0125]
洗碗机各工区有照明灯97。洗碗水通过洗碗机底部的斜板981汇聚到过滤漏斗982,污水排走,残渣留在漏斗中。
[0126]
图9a是一种平面型两工区洗碗机示意图,也即待洗碗具56a等纵横放置在待洗碗工区91的工位综合系统44a,洗净碗具56b纵横放置在洗净碗工区93的工位综合系统44b。洗碗工区省去,清洗模块插入到待洗碗工区91中。由于省去洗碗工区,洗碗机更加紧凑。
[0127]
清洗模块可以是单独的旋转喷头35m,或者分布式喷嘴70m。也能够在待洗碗工区开辟一个专门的清洗区域,用以放置清洗模块70,例如图6中的清洗模块71、72和73。分布式喷嘴70m的喷口向上或斜上方,并且两端的喷口向中间倾斜,使得更好地清洗碗口,以及避免水流喷溅到洗净碗工区。
[0128]
精密机械移动装置41和吸盘综合模块30在待洗碗工区拾取碗具,并将洗净碗放置在洗净碗工区。待洗碗工区91和洗净碗工区93之间有隔离装置913,例如可以活动的隔板等。隔板可以活动是指跟班913能够上下移动,这样可以充分利用垂直高度的空间。
[0129]
图9b是一种立体型两工区洗碗机示意图,也即待洗碗具56a等纵横放置在洗碗机下层的待洗碗工区91的工位综合系统44a。洗净碗具56b纵横放置在洗碗机上层的洗净碗工区93的工位综合系统44b。洗碗工区省去,清洗模块插入到待洗碗工区91中。由于省去洗碗工区,洗碗机体积更加紧凑。
[0130]
清洗模块70可以是单独的旋转喷头35m,或者分布式喷嘴。也能够在待洗碗工区开辟一个专门的清洗区域,用以放置清洗模块70,例如图8中的清洗模块70。
[0131]
精密机械移动装置41和吸盘综合模块30在待洗碗工区拾取碗具,并将洗净碗放置在洗净碗工区。待洗碗工区91和洗净碗工区93之间有碗具运送通道9123,碗具56a经过该通道9123运送到上层工位如碗具56b。
[0132]
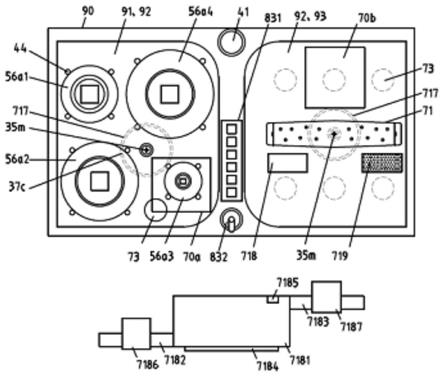
图10a和图10b是水槽洗碗机示意图,图10a是俯视图,图10b是侧视图。此时,精密机械移动装置的形态更像是精密机械臂41,简称机械臂。图10中,水槽90包含左右两个子水槽,左边水槽待洗碗工区91,待洗碗具56a:56a1~56a4倒扣放在工位综合系统44中,且工位综合系统44是可以移出的,洗碗时放入水槽中,洗碗完成后可以拿出水槽。水槽中有旋转喷头35m能够向上喷射水气,图10b示意图中,该旋转喷头35m位于漏水筒717的轴线。漏水筒717下接出水管道7251,出水管道通向下水管道,出水管道上有电磁阀7261控制通断。水槽还有超声波振子73,安装在水槽的底部73a/73c或侧壁73b/73d(73d1/73d2),当水槽中注入水7191a,能够利用超声波清洗碗具,同时利用喷头喷水清洗碗具,特别是在采用超声波清洗模式时,超声波喷头73还能够搅动水槽内的水流,增强超声波洗碗的效果。利用综合吸盘30m上的超声波振子,按压堆叠的碗具56,或者,吸盘拾取碗具56,并带动碗具56超声波(或高频)振荡,使得碗具56成为超声波(高频)换能器,直接产生超声波(高频)清洗效果。
[0133]
为避免洗碗产生溅水,利用侧壁喷头73d1/73d2来清洗碗具,此时碗具垂直或略倾斜放置,侧壁喷头73d1/73d2覆盖碗具中心附近及碗具下方部位,结合碗具旋转,就可以将碗具内部清洗干净。将水平面7197b调整到适当高度,能够进一步减少溅水。显然,这一清洗方法能够用于所有本发明形式的洗碗机。
[0134]
水槽洗碗机也有两种布局方式,一种是两工区,这样待洗碗工区91和洗碗工区92合而为一,本图中左边的水槽利用超声波73和旋转喷头35m的清洗,将碗具56a清洗干净。清洗的方式有多种,例如,一种方式是,先向左边水槽91中注入水7191a,利用超声波清洗碗具。之后,电磁阀7261打开放掉水槽里的水,利用机械臂41上的附属清洗装置或吸盘综合系统,清洗碗具背面。之后机械臂上的吸盘综合系统30将碗具拾起,移动到旋转喷头35m处,将碗具内部清洗(旋转喷头35m还具有喷雾功能,以进一步节约用水,同时避免水流溅出水槽。同样吸盘综合模块中的喷口也具有喷雾功能)。最后将洗净碗放入洗净碗放置处,例如右边的水槽(此时,右边水槽相当于洗净碗放置工区93),或搁放水槽的案板,或者碗柜44c。碗柜44c可以利用机械臂41后面墙上的空间,这样既不占用额外的厨房面积,又使得碗柜在机械臂的运送范围。又例如,另一种方式,在左边水槽91中安置图6a、6b、6c的清洗模块,利用旋转喷头、旋转喷臂(未画出,参见右边水槽的旋转喷臂71)、超声波、喷嘴(未画出,参见图9a的喷嘴70m)、精密机械臂上的附属清洗装置或吸盘综合系统来清洗碗具。
[0135]
另一种是三工区布局方式,左边水槽为待洗碗放置工区91,右边水槽为洗碗工区92。待洗碗具56a在左边水槽,利用旋转喷头、超声波、喷嘴、精密机械臂上的附属清洗装置和/或吸盘综合系统对碗具进行预清洗。然后机械臂41上的吸盘将碗具拾起,移到右边水槽92做进一步清洗。同样,右边水槽有超声波振子(高频振动器,其余同)73,向右边水槽注水7197b清洗碗具;或利用吸盘综合系统30上的超声振子清洗碗具。清洗模块70b见图6a、6b、6c中清洗模块71、72和73,旋臂式清洗模块71位于漏水筒717中心位置。为更好清洗碗具油污,水槽底部安装加热器718b和过滤板719b,水槽中的热水经过过滤板719b,然后通过管道
720、电磁阀7214、水泵7222以及返回管道7232,重新送入清洗模块70b或超声波喷头73c,电磁阀7215、7216提供管道的通断控制。清洗完毕,机械臂41将洗净碗移送到清洁碗放置处。
[0136]
加热器718a和过滤板719a同样也能够安装在左边水槽,过滤后的热水经过电磁阀7211、抽水泵7221,从输出管道7231重新从给清洗装置如超声波喷头73a和73b。
[0137]
为了解决电加热器718加热水时间较长问题,在洗碗机内增加预加热水罐7181,其冷水进水口7182,热水出水口7183,其内有加热器7184和温度感应器7185,电磁阀7186和7187负责进水与出水的通断。或者,为了解决高压气泵气量不足问题,在洗碗机内安装高压储气罐7181,其进气口7182,出气口7183,电磁阀7186(可以用单向阀)和7187负责进气与出气的通断。压力传感器7185测量储气罐内压力,当压力达到额定值,高压气泵(未画出)停止向储气罐7181供气;当压力低于某设定值,高压气泵启动,重新向储气罐7181供气,直到储气罐压力达到额定值。
[0138]
图10a还显示水槽洗碗机的操控按键831,手动阀门832能够操控机械臂41中的水槽出水管道的通断。
[0139]
图10b给出机械臂41示意图,由机械臂组成,底部模块411能够水平旋转运动(旋转轴线与水平面垂直),第二转轴412、第三转轴413、第四转轴414和第五转轴415能够俯仰转动(旋转轴线与水平面平行)。机械臂41承载吸盘综合系统30(附属清洗装置未画出,见图4)。机械臂由四段臂组成,分别是上立臂417、横向臂418、下垂臂419和摆动臂416。底部模块411能够带动整个机械臂水平旋转,第二转轴412能带动机械臂417俯仰面旋转。底部模块411和第二转轴412的位置次序能够互换。第三转轴能够带动横向机械臂418旋转,第四转轴带动下垂臂419旋转,第五转轴415使得摆动臂416旋转。当洗碗完成,底部模块411的旋转电机断电,使得机械臂41能够水平旋转,但第二转轴412和第三转轴413的旋转电机处于上电状态,第四转轴414和第五转轴415旋转电机断电,此时机械臂能够当做普通水龙头使用。
[0140]
考虑到水槽洗碗机无顶部遮挡,因此洗碗时防止溅水成为较大难题。还有一种可选的解决方案是将喷口安装在水槽的侧面,其喷射水流朝水平和/或下倾,机械臂是的碗具直立或略为向所述喷口倾斜,利用碗具旋转,将碗具清洗干净。
[0141]
图10a及图10b中,当碗具种类较多时,将左右两个水槽都作为待洗碗工区,清洗装置插放在两个水槽之中。碗具清洗干净之后,机械臂将碗具放在台面或厨柜中。
[0142]
显然,利用水槽洗碗机机械臂及机械臂前端的真空吸盘综合系统还可以清洗水槽。推而广之可以清洗本发明所有洗碗机内部,为叙述简洁起见,以清洗水槽这样一个具体的物体为例,而权利要求与清洗水槽相同。
[0143]
此外,利用机械臂及前端的的清洗工具,还能够清洗工作台面,例如利用喷嘴可以喷射水汽清洗工作台面,利用吸水装置及导管能够将清洗产生的污水抽吸排走。吸水口可以安装在真空吸盘综合系统中,优先考虑设置专用的吸水导管,或者特殊情况可选择与其它导管复用。
[0144]
将洗碗的方法用于清洗工作台面上的其它用具,例如清洗洗菜盆、洗菜篓和刀具等。以清洗刀具为例,同样在刀具上印制图形码(例如在刀具两面设置图形码,电子标签编码同样考虑,例如在刀把上,采用电子标签感应器)/坐标参考点标识/刀具参考方向,并将刀具的物理尺寸数据预先植入厨房用具数据库中。利用机械臂和真空吸盘综合系统上的相机(或感应器)对图形码/标识进行识别,然后利用机械臂前端的吸盘或机械手将刀具移到
水槽进行清洗,可以采用与洗碗相同的清洗方法和清洗装置,将刀具清洗干净。机械臂增加水平活动装置,使得机械臂活动范围扩大到整个工作台面。本发明提供了多种清洗方式,喷射清洗的包括:图3、图4中的附属清洗装置、吸盘综合模块,图6a、图6b及图6c中的旋转喷臂、储水槽、超声波喷头,图9a及图9b中的旋转喷头及分布式喷头,图10a及图10b水槽底部及侧面的超声波喷头。超声波清洗包括图3、图4的吸盘综合模块,图5a及图5b中工位综合系统的超声振子,图6a、图6b及图6c的储水箱及超声波喷头,图10a及图10b中水槽底部及侧面的超声波喷头。本发明实施例中创新清洗是吸盘综合模块中吸盘与超声波振子的结合,图3、图4、图6a、图6b、图6c和图10a及图10b中进行了说明,包括但不限于如下5种清洗方式:(1)吸盘拾取碗具,将碗具浸入水或水雾中,直接驱动碗具超声波振荡来清洗碗具;(1)吸盘拾取碗具,直接驱动碗具超声波振荡来干燥碗具;(3)吸盘拾取碗具,将碗具浸入水或水雾中,直接驱动碗具超声波振荡来清洗其它碗具;(4)堆叠碗具浸泡在水里,吸盘按压在堆叠碗具上,驱动堆叠碗具超声波振荡;(5)吸盘直接浸在水里,利用吸盘产生的超声波清洗碗具。传统的超声波清洗都是用超声波振子驱动水槽,水槽驱动水,水作用于碗具,因此效率相对较低,为达到较好的清洗效果需增加超声振子数量和单个超声振子的功率,造成能源浪费和恼人的啸叫噪声。同样,在洗碗机中采用高温加热来干燥碗具同样也比较困难,效率较低,而采用超声波直接驱动碗具振荡,将碗具上的水振动掉,这种方式效率较高。
[0145]
目前机器人研究日盛,但目前研究方向是模拟人工洗碗,也就是是采取机械手抓取碗具,然后倒清洗液进行清洗。这种方式目前仍具有很高难度。本发明通过将碗具倒扣在清洗工位上,预先清洗碗具背面,然后利用吸盘拾取碗具,将碗具移动到清洗模块处清洗,这种方式较好地解决了洗碗中的人工智能难题,形成了智能洗碗机雏形。
[0146]
即便是解决了上述人工智能难题,但是应用上述方法研制的洗碗机去清洗用户家中的碗具仍然是困难重重,甚至不可行。本发明提出智能洗碗机自带或指定碗具,将碗具标准化、模型化和预先数据化,解决了实际生活中大部分家庭的应用场景。结合纵横放置的洗碗机工位结构,以及并列型、立体型工区结构,使得商品化智能洗碗机成为可能。
[0147]
进一步,本发明将所述洗碗机做成开放结构,也就是利用家庭中厨房水槽来实现智能洗碗机,这样充分利用水槽已有的位置、空间、下水道台面和墙面,最大限度节约了厨房空间,最大限度地减少了安装难度。
[0148]
需要说明的是,本发明的说明书及其附图中给出了本发明的较佳的实施例,但是,本发明可以通过许多不同的形式来实现,并不限于本说明书所描述的实施例,这些实施例不作为对本发明内容的额外限制,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。并且,上述各技术特征继续相互组合,形成未在上面列举的各种实施例,均视为本发明说明书记载的范围;进一步地,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1