一种鲜橙水果智能榨汁机的制作方法
1.本实用新型涉及鲜橙榨汁领域,尤其涉及一种鲜橙水果智能榨汁机。
背景技术:
2.榨汁机是一种可以将果蔬快速榨成果蔬汁的机器,小型可家用。它早在1930年由诺蔓
·
沃克博士(dr.norman walker)发明。在此基础上,后来由设计师们改进出不同款式及不同原理的榨汁机。
3.现有的榨汁机不具有削皮功能,需要人工将削好皮的橙子放进榨汁腔内部,通过搅拌叶进行榨汁,然而随着生活水平的提高,人们的生活节奏日益加快,使得人们在家里面想喝鲜榨的橙汁但又不想自己削皮相互矛盾中。
4.因此,有必要提供一种鲜橙水果智能榨汁机解决上述技术问题。
技术实现要素:
5.本实用新型提供一种鲜橙水果智能榨汁机,解决了不具有削皮功能的问题。
6.为解决上述技术问题,本实用新型提供的鲜橙水果智能榨汁机,包括:箱体,所述箱体内壁的两侧之间通过隔板分隔为削皮腔和榨汁腔,所述箱体内壁的顶部固定连接有第一电动伸缩杆,所述第一电动伸缩杆的另一端设置有第一转动组件,所述第一转动组件的底部设置有固定块,所述固定块的一侧转动连接有导向板,所述导向板的另一侧固定连接有削皮刀片,所述固定块的一侧且位于导向板的背面固定连接有第一支撑板,所述第一支撑板与导向板之间设置有压缩弹簧,所述箱体内壁的顶部且位于第一电动伸缩杆的左侧固定连接有第一固定电机,所述第一固定电机输出轴的外表面通过固定组件固定连接有第二电动伸缩杆,所述第二电动伸缩杆的另一端固定连接有第一u形卡紧块,所述箱体内壁的顶部且位于第一固定电机的左侧固定连接有第三电动伸缩杆,所述第三电动伸缩杆的另一端固定连接有第二支撑板,所述第二支撑板的底部从左到右一侧固定连接有支撑杆和按压杆,所述支撑杆的底端设置有第二转动组件,所述第二转动组件的外表面固定连接有切割刀片。
7.优选的,所述箱体的一侧固定连接有伺服电机,所述伺服电机输出轴的外表面通过联轴器固定连接有螺纹杆,所述螺纹杆的另一端贯穿箱体并延伸至箱体的内部,所述螺纹杆的外表面且位于箱体的内部螺纹连接有移动块,所述移动块的顶部设置有第三转动组件,所述第三转动组件的顶部转动连接有锥形杆。
8.优选的,所述箱体的内部且靠近伺服电机的一侧固定连接有第三支撑板,所述第三支撑板的正面固定连接有第四电动伸缩杆,所述第四电动伸缩杆的另一端固定连接有支撑块,所述支撑块靠近锥形杆的一侧固定连接有第二u形卡紧块,所述支撑块的一侧与箱体的内壁滑动连接,通过支撑块的设置可以降低第四电动伸缩杆的受力,进而可以提高第四电动伸缩杆的稳定性,且可以提高第四电动伸缩杆的使用寿命。
9.优选的,所述隔板的底部固定连接有第二固定电机,所述第二固定电机输出轴的
外表面通过联轴器固定连接有搅拌叶。
10.优选的,所述隔板的顶部固定连接有滑轨,所述滑轨的内部滑动连接有滑块,所述滑块的顶部与移动块的底部固定连接,通过滑块的设置对移动块进行限位,避免在螺纹杆进行转动时带动移动块跟随转动,从而达不到移动块进行移动的效果,且可以提高移动块移动的便捷性。
11.优选的,所述隔板的顶部且位于削皮刀片的底部放置有残渣收集箱,所述隔板的顶部且位于第二u形卡紧块的底部开设有开口槽。
12.优选的,所述开口槽的内部设置有电磁阀。
13.与相关技术相比较,本实用新型提供的鲜橙水果智能榨汁机具有如下有益效果:
14.(1)、本实用新型提供一种鲜橙水果智能榨汁机,通过第二电动伸缩杆的启动,第二电动伸缩杆向下伸长带动第一u形卡紧块卡紧在待削皮橙子的顶部,启动第一电动伸缩杆,第一电动伸缩杆向下伸长带动削皮刀片向下移动,当移动至待削皮橙子的底部时,通过第一转动组件的启动带动削皮刀片转动,当削皮刀片与橙子的表面贴合时第一转动组件停止工作,同时启动第一固定电机和第一电动伸缩杆,第一固定电机输出轴的转动进而带动橙子进行转动,第一电动伸缩杆向上收缩带动削皮刀片向上移动,进而使得削皮刀片从橙子的底部向顶部进行削皮,在削皮的过程中通过压缩弹簧的设置可以对削皮刀片进行挤压,进而可以使得削皮刀片适应橙子的形状进行前后移动,使得削皮效果更好,能够对不同大小的橙子进行削皮,且代替了人工手动对橙子进行削皮,提高了削皮效率。
15.(2)、本实用新型提供一种鲜橙水果智能榨汁机,通过电磁阀的设置可以对开口槽进行控制开口与关闭,避免在榨汁时橙汁四处飞溅会从开口槽处飞溅至削皮腔的内部,从而提高了装置的实用性。
16.(3)、本实用新型提供一种鲜橙水果智能榨汁机,通过导向板的设置可以对削皮刀片削下来的皮进行导向,进而使得残渣掉落至残渣收集箱,避免残渣在削皮腔的内部杂乱掉落,从而提高了削皮腔内部的整洁度,降低了后期对削皮腔清理维护的工作量。
附图说明
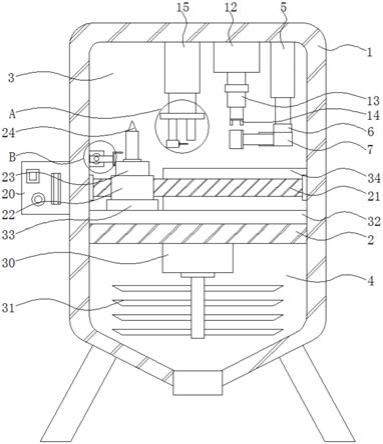
17.图1为本实用新型提供的鲜橙水果智能榨汁机的一种较佳实施例的结构示意图;
18.图2为图1所示的固定块的结构俯视图;
19.图3为图1所示的a处的局部放大图;
20.图4为图1所示的b处的局部放大图;
21.图5为图1所示的箱体的结构切面图;
22.图6为图1所示的箱体的结构立体图。
23.图中标号:1、箱体;2、隔板;3、削皮腔;4、榨汁腔;5、第一电动伸缩杆;6、第一转动组件;7、固定块;8、导向板;9、削皮刀片;10、第一支撑板;11、压缩弹簧;12、第一固定电机;13、第二电动伸缩杆;14、第一u形卡紧块;15、第三电动伸缩杆;16、第二支撑板;17、支撑杆;18、按压杆;19、切割刀片;20、伺服电机;21、螺纹杆;22、移动块;23、第三转动组件;24、锥形杆;25、第三支撑板;26、第四电动伸缩杆;27、支撑块;28、第二转动组件;29、第二u形卡紧块;30、第二固定电机;31、搅拌叶;32、滑轨;33、滑块;34、残渣收集箱;35、开口槽;36、电磁阀。
具体实施方式
24.下面结合附图和实施方式对本实用新型作进一步说明。
25.请结合参阅图1、图2、图3、图4、图5和图6,其中,图1为本实用新型提供的鲜橙水果智能榨汁机的一种较佳实施例的结构示意图;图2为图1所示的固定块的结构俯视图;图3为图1所示的a处的局部放大图;图4为图1所示的b处的局部放大图;图5为图1所示的箱体的结构切面图;图6为图1所示的箱体的结构立体图。鲜橙水果智能榨汁机包括:箱体1,所述箱体1内壁的两侧之间通过隔板2分隔为削皮腔3和榨汁腔4,所述箱体1内壁的顶部固定连接有第一电动伸缩杆5,所述第一电动伸缩杆5的另一端设置有第一转动组件6,所述第一转动组件6的底部设置有固定块7,所述固定块7的一侧转动连接有导向板8,所述导向板8的另一侧固定连接有削皮刀片9,所述固定块7的一侧且位于导向板8的背面固定连接有第一支撑板10,所述第一支撑板10与导向板8之间设置有压缩弹簧11,所述箱体1内壁的顶部且位于第一电动伸缩杆5的左侧固定连接有第一固定电机12,所述第一固定电机12输出轴的外表面通过固定组件固定连接有第二电动伸缩杆13,所述第二电动伸缩杆13的另一端固定连接有第一u形卡紧块14,所述箱体1内壁的顶部且位于第一固定电机12的左侧固定连接有第三电动伸缩杆15,所述第三电动伸缩杆15的另一端固定连接有第二支撑板16,所述第二支撑板16的底部从左到右一侧固定连接有支撑杆17和按压杆18,所述支撑杆17的底端设置有第二转动组件28,所述第二转动组件28的外表面固定连接有切割刀片19。
26.通过导向板8的设置可以对削皮刀片9削下来的皮进行导向,进而使得残渣掉落至残渣收集箱34,避免残渣在削皮腔3的内部杂乱掉落,从而提高了削皮腔3内部的整洁度,降低了后期对削皮腔3清理维护的工作量。
27.所述箱体1的背面通过铰链设置有柜门,柜门上设置有透明观察窗,通过柜门的设置便于将橙子扎在锥形杆24上,且便于对残渣收集箱34和削皮腔3的内部进行清理,通过观察窗的设置便于观察削皮腔3内部的工作情况进行观察。
28.所述第一转动组件6和第二转动组件28均为现有技术。
29.所述箱体1的一侧固定连接有伺服电机20,所述伺服电机20输出轴的外表面通过联轴器固定连接有螺纹杆21,所述螺纹杆21的另一端贯穿箱体1并延伸至箱体1的内部,所述螺纹杆21的外表面且位于箱体1的内部螺纹连接有移动块22,所述移动块22的顶部设置有第三转动组件23,所述第三转动组件23的顶部转动连接有锥形杆24。
30.所述第三转动组件23为现有技术。
31.所述箱体1的内部且靠近伺服电机20的一侧固定连接有第三支撑板25,所述第三支撑板25的正面固定连接有第四电动伸缩杆26,所述第四电动伸缩杆26的另一端固定连接有支撑块27,所述支撑块27靠近锥形杆24的一侧固定连接有第二u形卡紧块29。
32.所述第二u形卡紧块29与锥形杆24相适配。
33.所述隔板2的底部固定连接有第二固定电机30,所述第二固定电机30输出轴的外表面通过联轴器固定连接有搅拌叶31。
34.所述隔板2的顶部固定连接有滑轨32,所述滑轨32的内部滑动连接有滑块33。
35.所述隔板2的顶部且位于削皮刀片9的底部放置有残渣收集箱34,所述隔板2的顶部且位于第二u形卡紧块29的底部开设有开口槽35。
36.所述开口槽35的内部设置有电磁阀36。
37.通过电磁阀36的设置可以对开口槽35进行控制开口与关闭,避免在榨汁时橙汁四处飞溅会从开口槽35处飞溅至削皮腔3的内部,从而提高了装置的实用性。
38.本实用新型提供的鲜橙水果智能榨汁机的工作原理如下:
39.使用时,先打开柜门,将待削皮的橙子扎在锥形杆24的顶部,通过控制开关启动伺服电机20,伺服电机20输出轴逆时针转动带动螺纹杆21转动,进而带动待削皮的橙子向左侧移动,当待削皮的橙子移动至第一u形卡紧块14的底部时,伺服电机20停止工作,启动第二电动伸缩杆13,第二电动伸缩杆13向下伸长带动第一u形卡紧块14卡紧在待削皮橙子的顶部,启动第一电动伸缩杆5,第一电动伸缩杆5向下伸长带动削皮刀片9向下移动,当移动至待削皮橙子的底部时,通过第一转动组件6的启动带动削皮刀片9转动,当削皮刀片9与橙子的表面贴合时第一转动组件6停止工作,同时启动第一固定电机12和第一电动伸缩杆5,第一固定电机12输出轴的转动进而带动橙子进行转动,第一电动伸缩杆5向上收缩带动削皮刀片9向上移动,进而使得削皮刀片9从橙子的底部向顶部进行削皮,当削皮结束后,第一固定电机12和第一电动伸缩杆5停止工作,启动第二电动伸缩杆13,第二电动伸缩杆13进行收缩带动第一u形卡紧块14向上移动,进而使得第一u形卡紧块14退出橙汁的顶部;
40.启动伺服电机20,伺服电机20输出轴顺时针转动进而带动橙子向左侧移动,当橙子移动至按压杆18的底部时,伺服电机20停止工作,启动第三电动伸缩杆15,第三电动伸缩杆15向下伸长带动切割刀片19和按压杆18向下移动,当按压杆18与橙子的顶部贴合时,第三电动伸缩杆15停止工作,且启动第二转动组件28,第二转动组件37带动切割刀片19对橙子的顶部进行切皮,当切皮结束后,第三电动伸缩杆15启动,带动切割刀片19和按压杆18向上移动,紧接着启动伺服电机20,带动削好皮的橙子向左侧移动,移动的过程中启动第三转动组件23带动锥形杆24向背面转动九十度,当锥形杆24移动至与第二u形卡紧块29贴合时,伺服电机20停止工作,启动第四电动伸缩杆26,使得第四电动伸缩杆26进行收缩,进而带动第二u形卡紧块29向背面移动,从而实现了将橙子从锥形杆24向脱离下来,进而使得橙子从开口槽35掉落至榨汁腔4的内部,随后关闭电磁阀36,启动第二固定电机30,通过第二固定电机30输出轴的转动带动搅拌叶31转动,从而实现对橙子进行榨汁。
41.与相关技术相比较,本实用新型提供的鲜橙水果智能榨汁机具有如下有益效果:
42.通过第二电动伸缩杆13的启动,第二电动伸缩杆13向下伸长带动第一u形卡紧块14卡紧在待削皮橙子的顶部,启动第一电动伸缩杆5,第一电动伸缩杆5向下伸长带动削皮刀片9向下移动,当移动至待削皮橙子的底部时,通过第一转动组件6的启动带动削皮刀片9转动,当削皮刀片9与橙子的表面贴合时第一转动组件6停止工作,同时启动第一固定电机12和第一电动伸缩杆5,第一固定电机12输出轴的转动进而带动橙子进行转动,第一电动伸缩杆5向上收缩带动削皮刀片9向上移动,进而使得削皮刀片9从橙子的底部向顶部进行削皮,在削皮的过程中通过压缩弹簧11的设置可以对削皮刀片9进行挤压,进而可以使得削皮刀片9适应橙子的形状进行前后移动,使得削皮效果更好,能够对不同大小的橙子进行削皮,且代替了人工手动对橙子进行削皮,提高了削皮效率;
43.通过电磁阀36的设置可以对开口槽35进行控制开口与关闭,避免在榨汁时橙汁四处飞溅会从开口槽35处飞溅至削皮腔3的内部,从而提高了装置的实用性;
44.通过导向板8的设置可以对削皮刀片9削下来的皮进行导向,进而使得残渣掉落至残渣收集箱34,避免残渣在削皮腔3的内部杂乱掉落,从而提高了削皮腔3内部的整洁度,降
低了后期对削皮腔3清理维护的工作量。
45.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1