洗碗机的装载系统和具有此系统的洗碗机的制作方法
1.本发明涉及一种传送式洗碗机和一种用于对传送式洗碗机进行装载的系统。
2.根据本发明的传送式洗碗机尤其为商用传送式洗碗机,并且可以被设计为长龙式洗碗机或支架传送式洗碗机。
背景技术:
3.传送式洗碗机用于商业领域中。与其中的待清洁的清洗器皿在清洁期间在清洗机中保持固定在适当位置的家用洗碗机相反,传送式洗碗机中的清洗器皿被传送穿过洗碗机的不同处理区。
4.在传送式洗碗机中,清洗器皿(例如,托盘、碗碟、锅、玻璃杯、刀叉和其他待清洁的器具)被传送穿过多个处理区,例如,预清洗区、主清洗区、后清洗或预漂洗区、最终漂洗区和干燥区。为了将清洗器皿在传送方向上传送穿过传送式洗碗机,使用了传送设备,该传送设备通常具有用于固持清洗器皿的隔室。在长龙式洗碗机中,隔室可以通过传送设备的传送带上的支撑指来形成。在支架传送式洗碗机中,碗碟支架充当传送设备,在碗碟支架中可以形成用于接纳待处理的清洗器皿的隔室。此处可以想到,通过传送装置将碗碟支架传送穿过支架传送式洗碗机。
5.待清洁的清洗器皿通常在放置到传送带上之前被预分类。例如,文献us 6,530,996 b2公开了一种支架传送式洗碗机,其中待处理的清洗器皿被预分类,并在碗碟支架中递送到相应处理区。
6.传送式洗碗机尤其被用于大型设施(比如,餐馆和食堂)中,以便尽可能经济地清洁大量的脏清洗器皿。通过目前已知的种类的传送式洗碗机,每小时可以清洁数百套成套碗碟。测试表明,平均来说,每套成套餐具通常由一个托盘、一个盘子、一或两个碗、一个饮用玻璃杯和一副刀叉组成。
7.在几乎所有大型厨房(例如,公司食堂或餐馆)中,已被用餐者使用过的清洗器皿(陶器、饮用玻璃杯、刀叉等)被放在托盘上回收。从回收站,成套餐具被输送到清洗厨房。成套餐具通常在对应进给传送带上传送。成套餐具在传送带上从回收站进给到清洗厨房,直接进给到传送式洗碗机的装载区域。
8.在传送式洗碗机的装载或入口区域中,清洗器皿类物品通常被操作人员手动拾取,并放到传送式洗碗机的传送带上。
9.关于托盘或托盘状制品,预分类通常使得陶器和刀叉类物品被操作人员从待清洁的托盘上手动拾取,并且托盘接着被放在传送设备之前的堆叠体上或传送式洗碗机的入口区域(脏侧)中。此托盘堆叠体中的托盘不时地以按类型分类的方式被放到传送式洗碗机的传送带上并被清洁。
10.这种按类型分类的过程具有以下优点:托盘不会在托盘之后堆叠的较小清洗器皿类物品上造就喷雾阴影。此外,此程序大大简化了堆叠和卸堆的工作序列,并且与将清洗器皿与待清洁的托盘混合相比,效率较高。
11.然而,当此托盘堆叠体中的托盘以按类型分类的方式放置到洗碗机的传送带上并被清洁时,无法清洁其他清洗器皿,例如,盘子、碗或其他陶器,这是因为待放置在传送带上的托盘通常必须相对于传送方向横向地放置在传送带上,并且因此占据了传送带的所有可用表面区域。因此,与其他类型的清洗器皿相比,清洁托盘必须花费相对大量的时间。
12.此外,传送式洗碗机的操作人员在机器入口处必须在其工作序列中包含每个托盘两次:第一次是将刀叉和陶器类物品从待清洁的托盘上移除,并且第二次是将托盘实际放置在传送式洗碗机的传送带上。
13.在所描述的操作过程中,所涉及的人工工作量特别大。每套成套餐具的每个清洗器皿类物品(陶器类物品)必须单个且手动地从托盘移除,并放置到洗碗机的传送带上。
14.此外,每套成套餐具的独立刀叉类物品必须手动从托盘移除,并同样进给到传送式洗碗机。
15.接着进行实际托盘的上述处理。
16.在每小时几千个盘子的机器容量下,工作必须特别快速且有效地进行,结果是操作人员的身体压力增大。
技术实现要素:
17.考虑到这个问题,本发明的目的是以一种方式为引言部分中所述的类型的传送式洗碗机指明一种解决方案,以使得这种解决方案使整个清洗和漂洗过程更有效,其结果特别是,洗碗人员的工作时间可以缩短,并且洗碗机的资源消耗可以减少。
18.根据本发明,此目的通过独立权利要求1的主题来实现,所述主题的有利发展在对应的从属权利要求中阐述。
19.因此,本发明具体涉及一种用于洗碗机的优选自动或至少部分自动的装载的系统,该洗碗机特别被设计为商用传送式洗碗机,其中该系统具有:进给传送带,该进给传送带用于将清洗器皿进给到该传送式洗碗机的装载区域;以及分类布置,该分类布置用于具体根据预定义的或可预定义的清洗器皿组对通过该进给传送带进给到该传送式洗碗机的装载区域的清洗器皿进行优选自动或至少部分自动的分类。
20.该分类布置可以被设计成例如根据至少以下清洗器皿组对通过该进给传送带进给的清洗器皿进行分类:
21.·
第一清洗器皿组,包括由金属、特别是不锈钢制成的刀叉和/或刀叉类物品;
22.·
第二清洗器皿组,包括由塑料材料制成的托盘和托盘状物体;以及
23.·
第三清洗器皿组,包括由瓷或仿瓷材料制成的陶器类物品,特别是盘子、杯子和/或碗。
24.除此之外,可选地可以想到,该分类布置被设计成还根据以下清洗器皿组中的至少一个对通过该进给传送带进给的清洗器皿进行分类:
25.·
第四清洗器皿组,包括由玻璃或玻璃状材料制成的饮用玻璃杯和/或碗;以及
26.·
第五清洗器皿组,包括由金属、特别是不锈钢制成的容器,特别是gn容器、锅和/或平底锅。
27.根据本发明,特别提出,至少一个装载布置与该装载系统的分类布置相关联,以用于向该传送式洗碗机自动装载这些预定义的或可预定义的清洗器皿组之一的清洗器皿,例
如根据该第一、第二或第三清洗器皿组的清洗器皿。
28.通过根据本发明的装载系统,该传送式洗碗机可以配置有不同的扩展水平,以用于手动装载和卸载工作步骤的自动化。第一扩展水平可能要求除了主传送带之外,该传送式洗碗机还具有托盘通道(托盘传送带),其中此托盘通道优选平行于主传送带而布置。
29.在这种扩展水平下,例如,已描述的成套餐具由用餐者或洗碗人员直接放置到该装载系统的进给传送带上。接着,进给传送带将这些成套餐具传送到传送式洗碗机的入口或装载区域。此处,将刀叉和陶器类物品从这些托盘手动移除。接着,将手动移除的陶器类物品根据类型手动放置到该传送式洗碗机的主传送带中。所移除的刀叉类物品可以收集在清洗篮中,并且随后在传送式洗碗机中清洗。
30.通过该第一扩展水平,这些托盘不再根据类型手动放到洗碗机中。它们由该进给传送带在该传送式洗碗机的机器入口的方向上平行向前传送,并在机器入口处被同步装置或设定装置自动引入到特殊的托盘传送带(托盘通道)中。此托盘通道优选平行于主传送带延伸。
31.根据第二扩展水平,除了前述托盘通道之外,还可以存在单独的刀叉通道。该刀叉通道优选地同样平行于托盘通道并直接邻近于托盘通道而延伸。
32.如上所述,这些成套餐具被该装载系统的进给传送带传送到传送式洗碗机的入口或装载区域。在此第二扩展水平中,现在只需从所递送的托盘上手动移除陶器类物品和玻璃杯,并将其根据类型放置在主传送带中。托盘和位于其上的刀叉保留在进给传送带上。刀叉被向前传送到刀叉的同步装置,例如,刀叉拾取磁体。此处,刀叉类物品可以从托盘上被自动移除,并被引入传送式洗碗机的刀叉通道中。接着,托盘被传送到该同步装置,在该同步装置处,它被自动装载到传送式洗碗机的托盘通道中。
33.除此之外,为了进一步减少对该传送式洗碗机进行装载所需的手动操纵步骤,根据本发明的装载系统使得盘子和碗也可以根据类型被自动引入到传送式洗碗机中,特别引入到传送式洗碗机的主传送带中。
34.以此方式,总体上可以因此减少人工工作步骤的数量,并因而有助于洗碗人员的工作,这是因为在理想情况下,洗碗人员不再需要对传送式洗碗机手动地进行装载。特别地,根据本发明的装载系统确保了传送式洗碗机的高度人机工程学且用户友好的操作,这是因为不再需要将清洗器皿类物品手动装载到传送式洗碗机中。
35.除此之外,洗碗机提供的清洁效果通过根据本发明的装载系统而得到改善,这是因为所定义的清洗器皿组的所有清洗器皿在传送式洗碗机的主传送带上均匀地定向。此外,卸载过程可以被简化,这是因为每个清洗器皿组可以在所定义的通道上被输送传穿过传送式洗碗机,并且因此当其到达传送式洗碗机的卸载区域时已被预分类。
36.为了确保由根据本发明的装载系统的进给传送带递送到传送式洗碗机的装载区域的清洗器皿可以根据预定义的或可预定义的清洗器皿组而分类,根据本发明的装载系统的实施例提出了,该分类布置被设计成对通过进给传送带进给的清洗器皿类物品取决于所述清洗器皿类物品的材料、大小和/或形状、根据预定义的或可预定义的清洗器皿组进行分类。
37.例如,可以想到,该分类布置被设计成使得待在传送式洗碗机中处理的清洗器皿被自动区分。出于此目的,该分类布置可以被分派有清洗器皿检测器装置,该清洗器皿检测
器装置用于检测由进给传送带递送的清洗器皿类物品的类型(盘子、杯子、碗、刀叉、托盘、饮用玻璃杯等),并且将每个检测到的清洗器皿类型分派给预定义的或可预定义的清洗器皿组。
38.出于此目的,该分类布置可以被分派有对应的清洗器皿检测器装置,该清洗器皿检测器装置用于检测由进给传送带递送的清洗器皿类物品的类型。
39.此处使用的术语“清洗器皿检测器装置”应理解为被设计成检测或确定由进给传送带递送的清洗器皿的类型的任何检测装置。在此处特别可以想到,该清洗器皿检测器装置具有至少一个检测器器件,通过该至少一个检测器器件,可以检测由进给传送带递送的清洗器皿类物品的大小、形状和/或材料。
40.根据可能的实施例,该清洗器皿检测器装置可以具有至少一个优选光学的、电感式的或电容式的检测器器件,以使得可以检测对应清洗器皿类物品的大小、形状和/或材料,以便识别清洗器皿的类型。然而,其他类型的检测器也可以用作检测器器件,例如,电感式接近度传感器、光扫描器、光幕、激光扫描器、3d激光器、相机、旋转编码器等。
41.该清洗器皿检测器装置优选布置在该分类布置的上游,并且特别在被分派给该分类布置的该至少一个装载布置的上游,以使得可以检测所递送的清洗器皿的类型,并且可以激活对应的装载布置。
42.根据实施例,根据本发明的装载系统的分类布置或分派给该分类布置的清洗器皿检测器装置被设计成自动检测至少以下清洗器皿:
43.·
由瓷或仿瓷材料制成的盘子;
44.·
由瓷或仿瓷材料、玻璃或玻璃状材料制成的杯子;
45.·
由瓷或仿瓷材料、玻璃或玻璃状材料制成的碗;
46.·
由塑料材料制成的托盘或托盘状制品;
47.·
由金属、特别是不锈钢制成的容器,特别是gn容器;
48.·
由金属、特别是不锈钢制成的锅;
49.·
由金属、特别是不锈钢制成的平底锅;
50.·
由金属、特别是不锈钢制成的刀叉和刀叉类物品;
51.·
由玻璃或玻璃状材料制成的饮用玻璃杯;以及
52.·
由塑料制成的饮杯。
53.根据本发明的装载系统的实施例,该分类布置不仅被设计成自动检测由进给传送带递送的清洗器皿类物品的类型,而且由于其附加功能,将每个检测到的清洗器皿类型分派给预定义的或可预定义的清洗器皿组。
54.例如,该分类布置被设计成根据至少以下清洗器皿组对通过该进给传送带进给的清洗器皿进行分类:
55.·
第一清洗器皿组,包括由金属、特别是不锈钢制成的刀叉和/或刀叉类物品;
56.·
第二清洗器皿组,包括由塑料材料制成的托盘和托盘状物体;以及
57.·
第三清洗器皿组,包括由瓷或仿瓷材料制成的陶器类物品,特别是盘子、杯子和/或碗。
58.这种分派考虑到了以下认识:可以在传送式洗碗机的进给或装载区域处、以按类型分类的方式引入到相同输送通道中的不同清洗器皿类型的清洗器皿被组合在一个清洗
器皿组中。
59.特别有利的是,该分类布置具有多个或大量的分类站,在这些分类站中,通过进给传送带进给的清洗器皿被相继分类到预定义的清洗器皿组中。如在进给传送带的传送方向上所见,这些分类站优选一个接一个地布置。
60.为了确保自动装载系统可以完全自动运行,可以对该分类布置或该分类布置的各个分类站中的每一个分派每个清洗器皿组至少一个装载布置。
61.在该分类布置被设计成根据所述三个清洗器皿组对由该进给传送带递送的清洗器皿进行分类的上述示例中,第一装载布置优选与该分类布置相关联,以用于向传送式洗碗机自动装载该第一清洗器皿组的清洗器皿,其中此外,第二装载布置优选与该分类布置相关联,以用于向传送式洗碗机自动装载该第二清洗器皿组的清洗器皿,并且其中此外,第三装载布置与该分类布置相关联,以用于向该传送式洗碗机自动装载该第三清洗器皿组的清洗器皿。
62.为了与用于手动装载和卸载步骤的自动化的上述两个扩展水平兼容,如在进给传送带的传送方向上所见,该第三装载布置优选布置在第一装载布置和第二装载布置的上游,其中该第一装载布置优选布置在该第二装载布置的上游。
63.根据本发明的装载系统的优选配置,被设计成向传送式洗碗机自动装载第三清洗器皿组的清洗器皿的第三装载布置具有至少一个操纵器,该至少一个操纵器被设计成抓取通过该进给传送带进给的第三清洗器皿组的清洗器皿类物品、将所述清洗器皿类物品从进给传送带移除、并将所述清洗器皿类物品摆放在预定义的或可预定义的专用位置处。
64.此预定义的或可预定义的专用位置是例如传送式洗碗机的传送带的区域、特别是主传送带的区域。然而,替代于此,还可以想到,该预定义的或可预定义的专用位置位于优选在传送式洗碗机之外的区域中,并且充当用于形成清洗器皿堆叠体、特别是陶器堆叠体的摆放区域。
65.根据本发明的装载系统的优选配置,第三装载布置的该至少一个操纵器具有抓取器系统,该抓取器系统具有至少一组抓取钳和/或具有至少一个抽吸抓取器。此处,该第三装载布置的操纵器被设计成抓取由进给传送带递送的第三清洗器皿组的清洗器皿类物品、将所述清洗器皿类物品从该进给传送带移除、并将所述清洗器皿类物品摆放在所述预定义的或可预定义的专用位置处,其中这是传送式洗碗机的传送带的区域、特别是主传送带的区域、或者是在传送式洗碗机之外的摆放区域。可选地或附加于此,第三装载布置的该至少一个操纵器可以具有用于刀叉或刀叉类物品的可致动磁体,以便能够省去单独的刀叉拾取磁体。
66.在此方面,可以想到,第三装载布置的该至少一个操纵器具有起始位置,在该起始位置中,该操纵器的抓取器系统以一种方式布置在进给传送带上方,以使得第三清洗器皿组的清洗器皿类物品在被该进给传送带传送时,被传送到该至少一组抓取钳的抓取区域中和/或该至少一个抽吸抓取器的抓取区域中。第三装载布置的该至少一个操纵器的起始位置优选以一种方式来选择,以使得当被进给传送带传送时,只有第三清洗器皿组的清洗器皿类物品而不是该第一或第二清洗器皿组的清洗器皿类物品被传送到该至少一组抓取钳和/或该至少一个抽吸抓取器的抓取区域中。例如,如果该抓取器系统与进给传送带所处的平面适当地竖直间隔开,就可以实现这一点。
67.原则上有利的是,合适的传感器系统与第三装载布置的该至少一个操纵器的抓取器系统相关联,该传感器系统被设计成检测至少一个清洗器皿类物品、特别是该第三清洗器皿组的至少一个清洗器皿类物品何时位于该至少一组抓取钳的抓取区域中和/或该至少一个抽吸抓取器的抓取区域中。在此方面,还可以想到,设置合适的控制装置,该控制装置被设计成当与该抓取器系统相关联的传感器系统检测到至少一个清洗器皿类物品、特别是该第三清洗器皿组的至少一个清洗器皿类物品位于该至少一组抓取钳的抓取区域中和/或该至少一个抽吸抓取器的抓取区域中时,开始该至少一组抓取钳和/或该至少一个抽吸抓取器的抓取。
68.在此方面,有利的是,该控制装置还被设计成以一种方式致动第三装载布置的该至少一个操纵器,以使得所述操纵器将被该抓取器系统抓取的该至少一个清洗器皿类物品从进给传送带移除,并将所述清洗器皿类物品摆放在例如在该传送式洗碗机的主传送带上的预定义的或可预定义的专用位置处。
69.在最后提到的实施例的发展中,定位辅助装置与第三装载布置的该至少一个操纵器的抓取器系统相关联,该定位辅助装置具有至少一个引导元件,其中该至少一个引导元件被设计成优选仅将通过该进给传送带进给的第三清洗器皿组的清洗器皿在该至少一组抓取钳的抓取区域的方向和/或该至少一个抽吸抓取器的抓取区域的方向上引导。
70.替代或附加于此,优选光学操作的识别系统可以与该抓取器系统相关联,以用于自动识别通过进给传送带进给的清洗器皿、特别是该第三清洗器皿组的清洗器皿。在此实施例中,有利的是设置控制装置,该控制装置被设计成当该识别系统在通过该进给传送机进给的清洗器皿中识别出第三清洗器皿组的清洗器皿类物品时,将该第三装载布置的具有该抓取器系统的操纵器移动到该清洗器皿类物品。
71.本发明不仅涉及一种用于传送式洗碗机的优选全自动装载的装载系统,还涉及一种具有这种装载系统的对应的传送式洗碗机。
附图说明
72.下面参考附图更详细地描述根据本发明的解决方案的说明性实施例,在附图中:
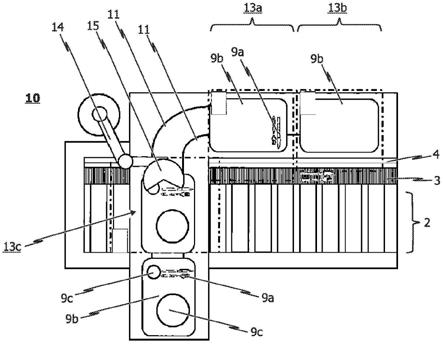
73.图1以平面图示意性地示出了传送式洗碗机的装载区域,该传送式洗碗机具有根据本发明的装载系统的说明性实施例;
74.图2a以侧视图示意性地示出了处于第一状态下的根据本发明的装载系统的说明性实施例,其中该装载系统的操纵器位于其起始位置或备用位置;
75.图2b以侧视图示意性地示出了处于第二状态下的根据图2a的装载系统,其中装载系统的操纵器位于其装载位置;
76.图3a以侧视图示意性地示出了处于第一状态下的根据本发明的装载系统的说明性实施例,其中该装载系统的操纵器位于其起始位置;
77.图3b以侧视图示意性地示出了处于第二状态下的根据图3a的装载系统,其中装载系统的操纵器处于其装载位置;
78.图4以等角视图示意性地示出了具有根据本发明的装载系统的说明性实施例的传送式洗碗机的装载区域,其中对应的装载布置用于平行于传送式洗碗机的主传送带延伸的托盘通道的自动装载;
79.图5a和图5b以平面图和横截面视图示意性地示出了根据图4的传送式洗碗机的主传送带和平行于主传送带延伸的托盘通道;
80.图6以等角视图示意性地示出了具有根据本发明的装载系统的说明性实施例的传送式洗碗机的装载区域,其中对应的装载布置用于平行于传送式洗碗机的主传送带延伸的托盘通道的自动装载,并且还用于平行于主传送带延伸的刀叉通道的自动装载;以及
81.图7a和图7b以平面图和横截面视图示意性地示出了根据图6的传送式洗碗机的主传送带以及平行于主传送带延伸的托盘和刀叉通道。
具体实施方式
82.图1以平面图示意性地示出了传送式洗碗机1的装载区域,仅示出了其中的一些部分。传送式洗碗机1具有用于将清洗器皿9a、9b、9c在传送方向上输送穿过传送式洗碗机1的传送设备(主传送带2、刀叉传送带3、托盘传送带4)。该传送设备特别被配置成允许在传送式洗碗机1的处理区域中同时处理彼此相邻布置的若干类型的清洗器皿,以便由此使整个清洗和漂洗过程更有效,其结果尤其为,可以减少洗碗人员的工作时间和洗碗机1的资源消耗。
83.此处讨论的传送式洗碗机1具有至少一个清洗区,例如,预清洗区和主清洗区,在清洗器皿9a、9b、9c的传送方向上所见,主清洗区布置在预清洗区的下游。在传送方向上所见,后清洗区优选布置在该至少一个清洗区的下游,并且至少一个最终漂洗区布置在后清洗区的下游,例如,淡水最终漂洗区和/或泵最终漂洗区。在清洗器皿9a、9b、9c的传送方向上所见,该至少一个最终漂洗区之后是干燥区。
84.传送式洗碗机1的相应区可以经由分离帘彼此分离。也可以想到,如在传送方向上所见被设置在传送式洗碗机1的装载区域之后的传送式洗碗机1流入隧道经由分离帘与传送式洗碗机1的入口分离。由于设置了分离帘,可以防止清洗液体和最终漂洗液体过度喷射以及蒸气从传送式洗碗机1逸出。
85.对传送式洗碗机1的处理区分派了喷射喷嘴。这些喷射喷嘴用于当待处理的清洗器皿9a、9b、9c由传送设备传送穿过相应处理区时,将液体喷射到这些清洗器皿上。处理区的各个喷射系统确保待处理的清洗器皿9a、9b、9c从顶侧和底侧被喷射清洗。
86.在图1示意性地示出的实施例中,用于对传送式洗碗机1进行装载的系统10设置在传送式洗碗机1的装载区域处。装载系统10具有相关联的进给传送带11,清洗器皿9a、9b、9c可以经由该进给传送带被进给到传送式洗碗机1的装载区域。
87.此外,装载系统10具有分类布置,通过该分类布置,由进给传送带11递送到传送式洗碗机1的装载区域的清洗器皿9a、9b、9c根据预定义的或可预定义的清洗器皿组被分类。
88.在图1所示的说明性实施例中,分类布置被具体设计成根据以下清洗器皿组对进给传送带11所进给的清洗器皿9a、9b、9c进行分类:
89.·
第一清洗器皿组,包括由金属、特别是不锈钢制成的刀叉和/或刀叉类物品9a;
90.·
第二清洗器皿组,包括由塑料材料制成的托盘和托盘状物体9b;以及
91.·
第三清洗器皿组,包括由瓷或仿瓷材料制成的陶器类物品9c,特别是盘子、杯子和/或碗。
92.原则上可以想到,此外,该分类布置被设计成另外根据以下清洗器皿组中的至少
一个对进给传送带11所进给的清洗器皿9a、9b、9c进行分类:
93.·
第四清洗器皿组,包括由玻璃或玻璃状材料制成的饮用玻璃杯和/或碗;以及
94.·
第五清洗器皿组,包括由金属、特别是不锈钢制成的容器,特别是gn容器、锅和/或平底锅。
95.此外,根据本发明的装载系统10(其说明性实施例以平面图在图1中示意性地示出)具有至少一个装载布置13a、13b、13c,该至少一个装载布置被分派给该分类布置,以便向传送式洗碗机1、具体是传送式洗碗机1的传送带(例如,主传送带2、刀叉传送带3、托盘传送带4)的适当通道或区域自动装载预定义的或可预定义的清洗器皿组之一的清洗器皿9a、9b、9c。
96.例如,在图1示意性示出的解决方案中,设置了第一装载布置13a,该第一装载布置被设计成向传送式洗碗机1、具体是平行于传送式洗碗机1的主传送带2延伸的刀叉通道3自动装载第一清洗器皿组的清洗器皿9a(即,由金属、特别是不锈钢制成的刀叉和/或刀叉类物品)。
97.此外,使用第二装载布置13b,该第二装载布置被设计成向传送式洗碗机1、具体是平行于传送式洗碗机1的主传送带2延伸的托盘通道4自动装载第二清洗器皿组的清洗器皿9b(即,由塑料材料制成的托盘和托盘状物体)。
98.此外,在图1所示的说明性实施例中,使用第三装载布置13c,该第三装载布置被设计成向传送式洗碗机1、具体是传送式洗碗机1的主传送带2自动装载第三清洗器皿组的清洗器皿9c(即,由瓷或仿瓷材料制成的陶器类物品)。
99.例如,此处提出,第三装载布置13c布置在第一装载布置13a和第二装载布置13b的上游,如在进给传送带的传送方向上所见。此外,在图1所示的实施例中,提出将第一装载布置13a布置在第二装载布置13b的上游。
100.在图1所示的说明性实施例中,第三装载布置13c具有操纵器14,该操纵器被特别设计成抓取第三清洗器皿组的清洗器皿类物品9c、将它们从进给传送带11移除、并将它们摆放在预定义的或可预定义的专用位置处。
101.此预定义的或可预定义的专用位置是传送式洗碗机1的传送带的区域中的、特别是传送式洗碗机1的主传送带2的区域中的位置。
102.然而,替代于此,原则上还可以想到,该预定义的或可预定义的专用位置位于优选在传送式洗碗机1之外的区域中,并且充当用于形成陶器堆叠体的摆放区域。
103.如从图1的平面图可见,提出了在根据本发明的装载系统10的说明性实施例中,第三装载布置13c的该至少一个操纵器14具有抓取器系统15,该抓取器系统具有至少一组抓取钳。
104.然而,替代于或附加于一组抓取钳,还可以想到,第三装载布置13c的抓取器系统15具有至少一个抽吸抓取器。
105.原则上有利的是,第三装载布置13c的操纵器14被设计成通过抓取器系统15特别抓取第三清洗器皿组的清洗器皿9c、将所述清洗器皿从进给传送带11上移除,并将所述清洗器皿摆放在预定义的或可预定义的专用位置处。
106.在此方面,可以想到,第三装载布置13c的该至少一个操纵器14具有起始位置或备用位置,在该起始位置或备用位置中,操纵器14的抓取器系统15以一种方式布置在进给传
送带11上方,以使得第三清洗器皿组的清洗器皿类物品9c在被进给传送带11传送时被传送到该至少一组抓取钳的抓取区域中。
107.在此方面,参考图2a中的示意图。具体来说,图2a以侧视图示意性地示出了处于第一状态下的根据本发明的装载系统10的说明性实施例,其中装载系统10的操纵器14处于其起始位置或备用位置。
108.第三装载布置13c的该至少一个操纵器14的起始位置或备用位置特别以一种方式来选择,以使得当被进给传送带11传送时,只有第三清洗器皿组的清洗器皿类物品9c而不是第一或第二清洗器皿组的清洗器皿类物品9a、9b被传送到该至少一组抓取钳的抓取区域中。
109.有利的是,传感器系统与第三装载布置13c的该至少一个操纵器14的抓取器系统15相关联,该传感器系统被设计成检测至少一个清洗器皿类物品9a、9b、9c、特别是第三清洗器皿组的至少一个清洗器皿类物品9c何时位于该至少一组抓取钳的抓取区域中。
110.装载系统10优选被分派有控制装置,该控制装置被设计成当分派给抓取器系统15的传感器系统检测到至少一个清洗器皿类物品9a、9b、9c、特别是第三清洗器皿组的至少一个清洗器皿类物品9c位于该至少一组抓取钳的抓取区域中时,开始该至少一组抓取钳的抓取。
111.根据有利实施例,该控制装置还优选地被设计成以一种方式致动第三装载布置13c的该至少一个操纵器14,以使得所述操纵器将被抓取器系统15抓取的该至少一个清洗器皿类物品从进给传送带11移除,并将所述清洗器皿类物品摆放在预定义的或可预定义的专用位置处。
112.例如,图2b以侧视图示意性地示出了处于第二状态下的根据图2a的装载系统10,其中装载系统10的操纵器14处于其装载位置。
113.原则上有利的是,定位辅助装置特别地与第三装载布置13c的该至少一个操纵器14的抓取器系统15相关联,该定位辅助装置具有至少一个引导元件,其中该至少一个引导元件被设计成优选仅将通过进给传送带11进给的该第三清洗器皿组的清洗器皿9c在抓取器系统15的该至少一组抓取钳的抓取区域的方向上引导。
114.根据发展,提出了优选光学操作的识别系统16与抓取器系统15相关联,以用于自动识别通过进给传送带11进给的清洗器皿9a、9b、9c、特别是第三清洗器皿组的清洗器皿9c。在此方面,参考图3a和图3b中的图示。
115.具体来说,图3a以侧视图示意性地示出了处于第一状态下的根据本发明的装载系统10的说明性实施例,其中装载系统10的操纵器14处于其起始位置或识别位置。相比之下,图3b以侧视图示意性地示出了处于第二状态下的根据图3a的装载系统10,其中装载系统10的操纵器14处于其装载位置。
116.在此实施例中,与装载系统10相关联的控制装置应被设计成当识别系统16在通过进给传送带11进给的清洗器皿9a、9c、9c中特别识别出第三清洗器皿组的清洗器皿类物品9c时,将第三装载布置13c的具有抓取器系统15的操纵器14移动到清洗器皿类物品9。
117.在图2a和图3a示意性地示出的解决方案中,操纵器14的起始位置在每种情况下布置在进给传送带11上方。操纵器14配备有抓取器系统15。
118.在图2a所示的解决方案中,抓取器系统15本身配备有传感器,该传感器检测在抓
取器系统15的该至少一个抓取器的抓取区域中清洗器皿9a、9b、9c、特别是第三清洗器皿组的清洗器皿9c的存在。
119.清洗器皿9a、9b、9c一旦被进给传送带11传送到抓取器系统15的该至少一个抓取器的抓取区域中,就被该传感器检测到,并且抓取器自动闭合。以这种方式,使清洗器皿9a、9b、9c停止在抓取器系统15中。
120.在下一步骤中,操纵器14将清洗器皿类物品9c从托盘9b移除。清洗器皿类物品9c接着在理想情况下被分类到传送式洗碗机1的主传送带2中。出于此目的,操纵器14例如执行枢转移动,并且将清洗器皿类物品9c平行于输送隔室而放置,这些输送隔室是主传送带2被划分而成的。当有输送隔室位于清洗器皿类物品9c下方时,抓取器系统15的抓取器打开,并且因此将清洗器皿类物品9c装载到主传送带2中(参见图2b)。
121.如前所述,操纵器14可以替代性地将清洗器皿类物品9c摆放在专用摆放区域中并因此形成陶器堆叠体。接着,这可以由操作人员分类到主传送带2中。
122.取决于所使用的操纵器14以及抓取器系统15,可以集成附加的定位辅助装置,该定位辅助装置将清洗器皿9c在托盘上对齐。以此方式,操纵器14可以更有效地抓取清洗器皿9c并将其从托盘9b移除。
123.与图2a和图2b示意性地示出的第一解决方案一样,图3a和图3b示出的第二解决方案中的操纵器14的起始位置在进给传送带11上方。然而,与根据图2a的抓取器系统15相反,根据图3a的抓取器系统15被分派有优选光学操作的识别系统16,该识别系统用于自动识别由进给传送带11递送的清洗器皿9a、9b、9c、特别是第三清洗器皿组的清洗器皿9c。
124.例如,光学操作的识别系统16可以被配置为相机系统,操纵器14的抓取器系统15配备有该相机系统。借助于此光学操作的识别系统16或相机系统,能够识别清洗器皿类物品9c及其在托盘9b上的位置,这些托盘被进给传送带11连续传送到传送式洗碗机1的入口区域。
125.此外,设置了控制装置,该控制装置被设计成当识别系统16在通过进给传送带11进给的清洗器皿9a、9c、9c中识别出第三清洗器皿组的清洗器皿类物品9c时,将第三装载布置13c的具有抓取器系统15的操纵器14移动到清洗器皿类物品9c。
126.出于此目的,操纵器臂位于其在进给传送带11上方的备用或识别位置中(参见图3a)。当成套餐具借助于进给传送带11被输送经过光学操作的识别系统16时,各个陶器类物品9c的位置首先被识别。接着,操纵器14将自身自动定位在对应的陶器类物品9c处。借助于光学操作的识别系统16,确保陶器类物品9c被抓取器系统15正确接纳并停止。
127.在下一步骤中,操纵器14将清洗器皿类物品9c从托盘9b移除。清洗器皿类物品9c接着在理想情况下被分类到传送式洗碗机1的主传送带2中。出于此目的,操纵器14执行枢转移动,并且将清洗器皿类物品9c平行于输送隔室而放置,这些输送隔室是主传送带2被划分而成的。当有输送隔室位于陶器类物品下方时,抓取器系统15打开,并且因此将陶器类物品9c装载到主传送带中(参见图3b)。
128.同样在此解决方案中,替代方案是借助于操纵器14将清洗器皿类物品9c放置到专用摆放区域上,以便因此形成陶器堆叠体。接着,陶器堆叠体可以由操作人员分类到主传送带中。
129.取决于所使用的操纵器14以及抓取器系统15,此处还可以集成附加的定位辅助装
置,该定位辅助装置将清洗器皿9c在托盘9b上对齐。以此方式,操纵器14可以更有效地抓取清洗器皿9c并将其从托盘9b移除。
130.抓取器系统15与光学操作的识别系统16/相机系统的组合提供了以下优点:在被抓取之前,清洗器皿9c在每种情况下都被光学操作的识别系统16/相机系统识别。
131.以此方式,操作人员可以执行附加的工作步骤,例如,将剩菜从成套餐具中移除,将玻璃杯从托盘移除,将附加的清洗器皿(例如,第四或第五清洗器皿组的清洗器皿)从托盘直接装载到传送式洗碗机1中,以及从其他清洗器皿中挑选出刀叉类物品9a。
132.如果在手动工作步骤期间,清洗器皿类物品9c在托盘9b上移位,这不会对操纵器14的功能产生影响,因为光学操作的识别系统16在清洗器皿类物品9c即将从托盘9b移除之前检测到这些清洗器皿类物品。
133.相比之下,在光学操作的识别系统16被布置在上游的情况下,在识别系统16与操纵器14之间不允许手动工作步骤。在这种情况下,识别系统16检测在进给传送带11上传送到传送式洗碗机1的成套餐具的清洗器皿类物品9c。
134.在下一步骤中,陶器类物品9c从操纵器14移除。识别系统16与操纵器14之间的手动工作步骤可能导致清洗器皿类物品9c移位,这具有的影响是操纵器14无法将清洗器皿类物品从托盘9b移除。
135.图4以等角视图示意性地示出了具有根据本发明的装载系统10的说明性实施例的传送式洗碗机1的装载区域,其中对应的装载布置13b(第二装载布置)用于对平行于传送式洗碗机1的主传送带延伸的托盘通道4自动地进行装载。
136.图5a和图5b以平面图(图5a)和横截面视图(图5b)示意性地示出了根据图4的传送式洗碗机1的主传送带2以及平行于主传送带延伸的托盘通道4。
137.图6以等角视图示意性地示出了传送式洗碗机1的装载区域、具体是与第一装载布置13a和第二装载布置13b一起,这些装载布置被分派给根据本发明的装载系统10的分类布置。此处,第一装载布置13a用于向传送式洗碗机1自动装载第一清洗器皿组的清洗器皿9a,即,由金属、特别是不锈钢制成的刀叉和/或刀叉类物品。
138.图7a和图7b以平面图(图7a)和横截面视图(图7b)示意性地示出了根据图6的传送式洗碗机1的主传送带2以及平行于主传送带延伸的托盘通道4和刀叉通道3。
139.在进给传送带11的传送方向上所见,第一装载布置13a布置在第二装载布置13b的上游。第二装载布置13b用于将第二清洗器皿组的清洗器皿9b自动装载到传送式洗碗机1中。
140.如从图7a和图7b中的图示可见,此实施例中的传送式洗碗机1的传送设备具有用于托盘或托盘状清洗器皿9b的第一传送带4(=托盘通道)以及平行于第一传送带4延伸的、用于刀叉或刀叉状物品的第二传送带3(=刀叉通道)还以及平行于第二传送带延伸的、用于第三清洗器皿组的清洗器皿9c的第三传送带2(=主传送带)。
141.与第三传送带2相比,第一传送带4相对窄,以使得托盘或托盘状清洗器皿9b仅在被竖着放置并且平行于传送方向定向的状态下才可以从第一传送带4移除。将从第一传送带4移除的清洗器皿9b的取向平行于第一传送带4运行的方向,这使得对总传送带表面区域的表面积的利用最小。
142.换句话说,第一传送带4具有的宽度以一种方式减小,以使得总传送带表面区域的
仅极小表面积被第一传送带4占据,这特别允许托盘或托盘状清洗器皿9b在该清洗器皿9b处于其被竖着放置并且平行于传送方向定向的状态下被放置在适当位置。
143.被设计为刀叉传送带的第二传送带3与第三传送带2相比同样具有减小的宽度。
144.这意味着第三传送带2可以如前所述具有足够的宽度,以便继续能够几乎不受限制地用于将第三清洗器皿组的清洗器皿9c、特别是盘子、碗和/或玻璃杯传送穿过传送式洗碗机的独立处理区。因此,例如如前所述,玻璃杯或gn容器的支架也可以靠近被接纳在第一传送带上的托盘或托盘状清洗器皿9b而放置在第三传送带2上。
145.图4和图6各自仅示出了分类布置的一部分,具体是分类布置的、在进给传送机的传送方向上所见被布置在第三装载布置13a、13b、13c之后的那个区域。
146.从此处,已借助于第三装载布置13c(图4和图6中未示出)被自动移除了第三清洗器皿组的清洗器皿9c的成套餐具经由进给传送带13被递送到根据图4和图6的第一装载布置13a。在第一装载布置13a中,刀叉9a借助于可致动磁体17形式的刀叉拾取磁体从托盘9b移除,并且接着,刀叉类物品9a被自动引入到传送式洗碗机1的刀叉通道3中。
147.接着,托盘9b被进给到第二装载布置13b的同步装置,此处,托盘被自动放置到传送式洗碗机1的对应托盘通道4中(参见图6)。
148.图6示出了第二装载布置13b的同步装置的实施例。简而言之,同步装置具有对应引导件18,托盘9b经由该引导件自动从其水平状态转移到其竖立状态,并且接着,它们被引入到传送式洗碗机1的对应托盘通道4中。
149.本发明并不限于附图所示出的实施例,并且实际上是对本文公开的所有特征的综合考虑的结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1