一种清洁机器人的制作方法
本公开涉及自动化,尤其涉及一种清洁机器人。
背景技术:
1、随着科学技术的发展,越来越多的清洁机器人走进了人们的生活。例如:扫地机器人、拖地机器人等。这些清洁机器人给人们的生产和生活带来了极大的便利。
2、清洁机器人在进行工作之前,需要针对具体的工作环境,创建工作地图。相关技术中,清洁机器人在自动创建工作地图,以及利用创建好的工作地图进行工作的过程中,常使用激光雷达传感器扫描周围环境信息。激光组件安装于清洁机器人的顶部,安装座由电机通过皮带轮带动,露出清洁机器人的机壳,且需要为激光组件设置碰撞保护机构,造成清洁机器人高度较高,不利于进入低矮的空间,如床底、柜底等。相关技术中,出于成本的考虑,使用二维激光雷达传感器,分辨率不高,无法实现准确的定位。
3、因此,亟需一种定位准确度高、占用尺寸小的传感器组件供清洁机器人使用。
技术实现思路
1、为克服相关技术中存在的至少一个问题,本公开提供一种清洁机器人。
2、根据本公开实施例的第一方面,提供一种清洁机器人。包括:
3、壳体;
4、激光雷达传感器组件,设置于所述壳体的顶部所在平面以下的位置,用于获取清洁机器人周围环境的激光点云数据,所述激光雷达传感器组件包括激光雷达传感器;
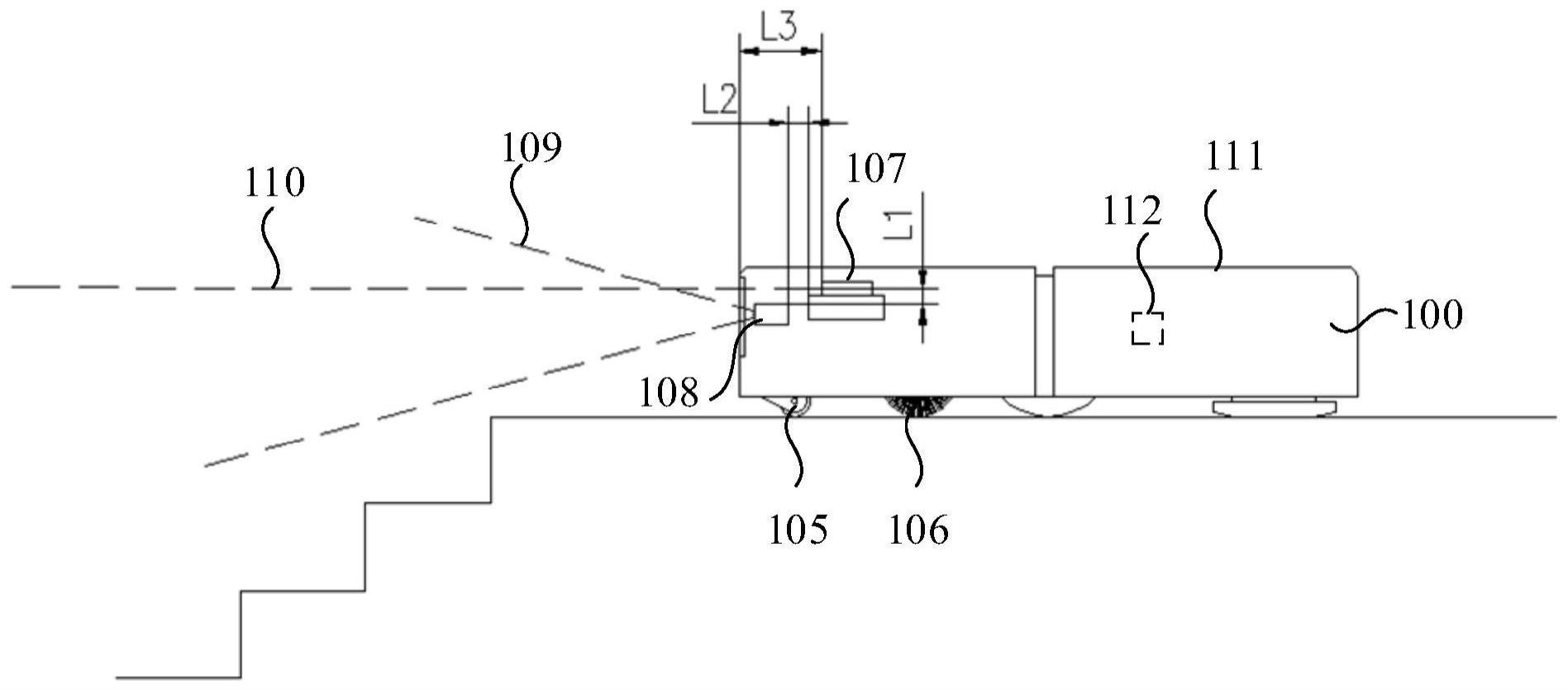
5、视觉传感器组件,包括视觉传感器,所述视觉传感器组件设置于所述壳体的顶部所在平面以下的位置,所述视觉传感器组件用于获取清洁机器人周围环境的图像数据;所述视觉传感器组件设于所述激光雷达传感器组件的扫描区域之外,所述激光雷达传感器组件设于所述视觉传感器组件的视野之外;
6、处理器,设置于所述壳体内部,所述处理器电性连接于所述激光雷达传感器组件和所述视觉传感器组件,用于对所述激光点云数据和所述图像数据进行处理。
7、在一种可能的实现方式中,所述视觉传感器组件的最高面低于所述激光雷达传感器扫描面;或,所述视觉传感器组件的最低面高于所述激光雷达传感器扫描面。
8、在一种可能的实现方式中,所述视觉传感器组件的最高面低于所述激光雷达传感器扫描面1-3mm;或,所述视觉传感器组件的最低面高于所述激光雷达传感器扫描面1-3mm。
9、在一种可能的实现方式中,所述视觉传感器组件与所述激光雷达传感器组件的水平距离大于零。
10、在一种可能的实现方式中,所述视觉传感器组件与所述激光雷达传感器组件的水平距离的范围是1-3mm。
11、在一种可能的实现方式中,所述视觉传感器组件与所述壳体前端的距离小于等于所述激光雷达传感器组件与所述前端壳体的距离。
12、在一种可能的实现方式中,所述激光雷达传感器组件还包括旋转激光座和电机,所述旋转激光座用于固定所述激光雷达传感器,所述电机直接驱动所述旋转激光座转动。
13、在一种可能的实现方式中,所述激光雷达传感器组件的高度小于等于40mm。
14、在一种可能的实现方式中,所述视觉传感器组件还包括补光单元。
15、在一种可能的实现方式中,所述补光单元的工作频段与所述激光雷达传感器发射激光的频段不同。
16、在一种可能的实现方式中,,所述清洁机器人还包括滤光单元。
17、在一种可能的实现方式中,激光雷达一个周期内的扫描区域包括前向区域和后向区域,所述补光单元工作于激光雷达扫描所述后向区域的时间段内;其中,所述前向区域为所述清洁机器人前进方向上位于所述清洁机器人前方的区域,所述后向区域为所述清洁机器人前进方向上位于所述清洁机器人后方的区域。
18、在一种可能的实现方式中,所述清洁机器人还包括安装于所述壳体前侧的光学透明视窗,所述激光雷达传感器发射或接收的激光透过所述光学透明视窗,所述光学透明视窗呈弧形状,所述光学透明视窗的角度大于或等于所述激光雷达传感器预设的前向扫描的角度。
19、在一种可能的实现方式中,所述处理器对所述激光点云数据和所述图像数据进行处理时包括:
20、获取所述图像数据中的特征点云数据;
21、将所述激光点云数据与所述特征点云数据转换至同一坐标系中;
22、基于所述激光点云数据和所述特征点云数据,确定所述清洁机器人的工作地图和/或障碍物的位置。
23、在一种可能的实现方式中,所述处理器对所述激光点云数据和所述图像数据进行处理时包括:
24、基于所述图像数据确定障碍物位置;
25、基于所述激光点云数据所述清洁机器人的工作地图。
26、本公开的实施例提供的技术方案可以包括以下有益效果:本公开实施例,将激光雷达传感器组件设置于清洁机器人的壳体内部,降低了清洁机器人的尺寸高度,使得清洁机器人可以进入较为低矮的空间。通过设置所述视觉传感器组件设于所述激光雷达传感器组件的扫描区域之外,所述激光雷达传感器组件设于所述视觉传感器组件的视野之外,使得所述视觉传感器的扫描区域与所述激光雷达传感器的扫描区域互相不遮挡,在缩小两传感器所占空间的同时,视觉传感器可以为清洁机器人提供近处的环境信息,激光雷达传感器可以为清洁机器人提供远处的环境信息,两者相互融合,提高了清洁机器人检测的准确度。
27、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种清洁机器人,其特征在于,包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述视觉传感器组件的最高面低于所述激光雷达传感器扫描面;或,所述视觉传感器组件的最低面高于所述激光雷达传感器扫描面。
3.根据权利要求2所述的清洁机器人,其特征在于,所述视觉传感器组件的最高面低于所述激光雷达传感器扫描面1-3mm;或,所述视觉传感器组件的最低面高于所述激光雷达传感器扫描面1-3mm。
4.根据权利要求2所述的清洁机器人,其特征在于,所述视觉传感器组件与所述激光雷达传感器组件的水平距离大于零。
5.根据权利要求4所述的清洁机器人,其特征在于,所述视觉传感器组件与所述激光雷达传感器组件的水平距离的范围是1-3mm。
6.根据权利要求2所述的清洁机器人,其特征在于,所述视觉传感器组件与所述壳体前端的距离小于等于所述激光雷达传感器组件与所述前端壳体的距离。
7.根据权利要求1所述的清洁机器人,其特征在于,所述激光雷达传感器组件还包括旋转激光座和电机,所述旋转激光座用于固定所述激光雷达传感器,所述电机直接驱动所述旋转激光座转动。
8.根据权利要求1所述的清洁机器人,其特征在于,所述激光雷达传感器组件的高度小于等于40mm。
9.根据权利要求1所述的清洁机器人,其特征在于,所述视觉传感器组件还包括补光单元。
10.根据权利要求9所述的清洁机器人,其特征在于,所述补光单元的工作频段与所述激光雷达传感器发射激光的频段不同。
11.根据权利要求1所述的清洁机器人,其特征在于,所述清洁机器人还包括滤光单元。
12.根据权利要求9所述的清洁机器人,其特征在于,激光雷达一个周期内的扫描区域包括前向区域和后向区域,所述补光单元工作于激光雷达扫描所述后向区域的时间段内;其中,所述前向区域为所述清洁机器人前进方向上位于所述清洁机器人前方的区域,所述后向区域为所述清洁机器人前进方向上位于所述清洁机器人后方的区域。
13.根据权利要求1所述的清洁机器人,其特征在于,所述清洁机器人还包括安装于所述壳体前侧的光学透明视窗,所述激光雷达传感器发射或接收的激光透过所述光学透明视窗,所述光学透明视窗呈弧形状,所述光学透明视窗的角度大于或等于所述激光雷达传感器预设的前向扫描的角度。
14.根据权利要求1所述的清洁机器人,其特征在于,所述处理器对所述激光点云数据和所述图像数据进行处理时包括:
15.根据权利要求1所述的清洁机器人,其特征在于,所述处理器对所述激光点云数据和所述图像数据进行处理时包括:
技术总结
本公开涉及一种清洁机器人。包括壳体;激光雷达传感器组件,设置于所述壳体的顶部所在平面以下的位置,用于获取清洁机器人周围环境的激光点云数据;视觉传感器组件,所述视觉传感器组件设置于所述壳体的顶部所在平面以下的位置,所述视觉传感器组件用于获取清洁机器人周围环境的图像数据;处理器,设置于所述壳体内部,所述处理器电性连接于所述激光雷达传感器组件和所述视觉传感器组件,用于对所述激光点云数据和所述图像数据进行处理。本公开实施例,将激光雷达传感器组件设置于清洁机器人的壳体内部,降低了清洁机器人的尺寸高度,使得清洁机器人可以进入较为低矮的空间。
技术研发人员:高振东,谭一云,钟红风,张士松
受保护的技术使用者:苏州乐图智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!