清洁方法、装置、设备及可读存储介质与流程
本申请涉及人工智能,特别涉及一种清洁方法、装置、设备及可读存储介质。
背景技术:
1、随着科学技术的进步和社会发展,特别是受生活节奏的加快和工作压力增大的影响,人们希望从繁琐的家庭日常清洁事务中解脱出来。
2、拖地机器人作为新一代的智能家居设备,其在工作中能够边清扫边拖地,倍受用户的喜爱。清洁过程中,用户通过物理按键、语音等方式唤醒拖地机器人,拖地机器人行进过程中边清扫边拖地,极大程度上解放了用户的双手。
3、拖地机器人拖地后地面是湿润状态。此时,若有人不小心踩踏刚刚拖过的未干区域,则会留下印记,导致清洁不彻底。
技术实现思路
1、本申请实施例提供一种清洁方法、装置、设备及可读存储介质,通过对踩踏区域进行补拖,实现提高清洁质量的目的。
2、第一方面,本申请实施例提供一种清洁方法,包括:
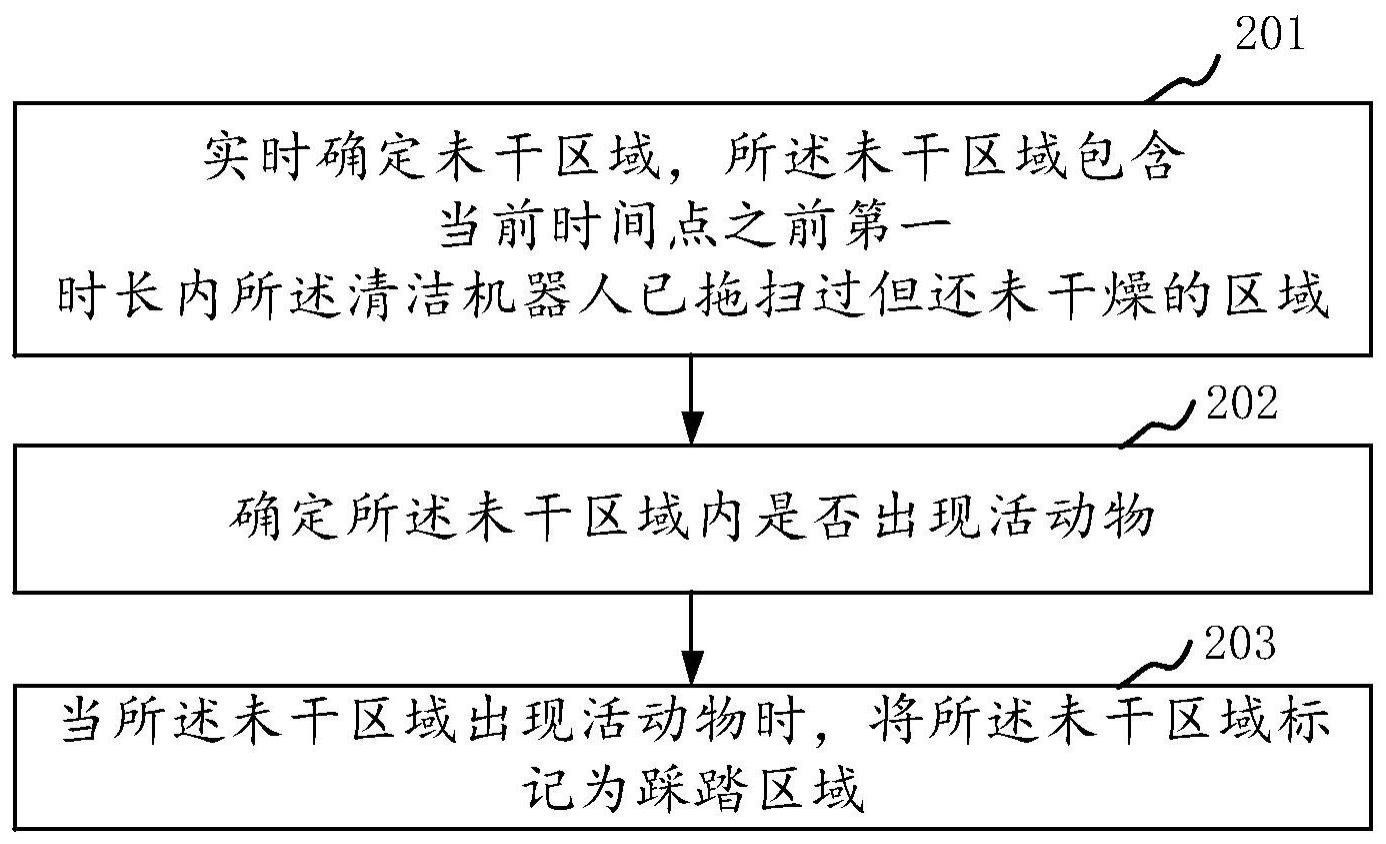
3、实时确定未干区域,所述未干区域包含当前时间点之前第一时长内所述清洁机器人已拖扫过但还未干燥的区域;
4、确定所述未干区域内是否出现活动物;
5、当所述未干区域出现活动物时,将所述未干区域标记为踩踏区域;
6、拖扫所述踩踏区域。
7、第二方面,本申请实施例提供一种清洁装置,包括:
8、第一确定模块,用于实时确定未干区域,所述未干区域是距离清洁机器人当前位置最近的一块已拖扫过但还未干燥的区域;
9、第二确定模块,用于确定所述未干区域内是否出现活动物;
10、标记模块,用于当所述第二确定模块确定出所述未干区域出现活动物时,将所述未干区域标记为踩踏区域;
11、处理模块,用于所述标记模块标记出的所述踩踏区域。
12、第三方面,本申请实施例提供一种电子设备,包括:处理器、存储器及存储在所述存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时使得所述电子设备实现如上第一方面或第一方面各种可能的实现方式所述的方法。
13、第四方面,本申请实施例提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机指令,所述计算机指令在被处理器执行时用于实现如上第一方面或第一方面各种可能的实现方式所述的方法。
14、第五方面,本申请实施例提供一种包含计算程序的计算机程序产品,所述计算机程序被处理器执行时实现如上第一方面或第一方面各种可能的实现方式所述的方法。
15、本申请实施例提供的清洁方法、装置、设备及可读存储介质,清洁机器人拖扫过程中实时确定出未干区域并监控未干区域。当未干区域内出现活动物时,将未干区域标记为踩踏区域,并对踩踏区域重新进行拖扫。采用该种方案,如果活动物不小心踩踏进入刚刚拖过的未干区域,则清洁机器人能够标记出踩踏区域并对踩踏区域进行补拖,通过在拖地过程中对“清扫成果”进行监控和巩固,实现提高清洁质量的目的。
技术特征:
1.一种清洁方法,其特征在于,应用于清洁机器人,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述拖扫所述踩踏区域,包括:
3.根据权利要求2所述的方法,其特征在于,所述拖扫所述扩展区域,包括:
4.根据权利要求3所述的方法,其特征在于,还包括:
5.根据权利要求2所述的方法,其特征在于,所述拖扫所述扩展区域,包括:
6.根据权利要求1-5任一项所述的方法,其特征在于,所述实时确定未干区域,包括:
7.根据权利要求6所述的方法,其特征在于,所述从所述清洁机器人的行进路径上确定出当前位置和参考位置之前,还包括:
8.根据权利要求1-5任一项所述的方法,其特征在于,所述实时确定未干区域之前,还包括:
9.根据权利要求1-5任一项所述的方法,其特征在于,所述确定所述未干区域内是否出现活动物,包括:
10.根据权利要求1-5任一项所述的方法,其特征在于,所述拖扫所述踩踏区域之前,还包括:
11.根据权利要求1-5任一项所述的方法,其特征在于,所述当所述未干区域出现活动物时,将所述未干区域标记为踩踏区域之后,还包括:
12.一种清洁装置,其特征在于,包括:
13.一种电子设备,包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时使得所述电子设备实现如权利要求1至11任一所述的方法。
14.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至11任一所述的方法。
技术总结
本申请公开了一种清洁方法、装置、设备及可读存储介质,清洁设备拖扫过程中实时确定出未干区域并监控未干区域。当未干区域内出现活动物时,将未干区域标记为踩踏区域,并对踩踏区域重新进行拖扫。采用该种方案,如果活动物不小心踩踏进入刚刚拖过的未干区域,则清洁设备能够标记出踩踏区域并对踩踏区域进行补拖,通过在拖地过程中对“清扫成果”进行监控和巩固,实现提高清洁质量的目的。
技术研发人员:陈逸然,卢海伟,沈慧想,马蕾,鲍亮
受保护的技术使用者:氪见(南京)科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!