机器人的制作方法
本发明涉及智能设备,更具体地,涉及一种机器人。
背景技术:
1、随着人工智能(artificial intelligence,ai)产业的发展,越来越多的人形机器人出现在市场上,比如,轮式机器人和双足机器人。其中,双足机器人具有高灵活性,可以在复杂地形中行进,但无法实现在平坦或简单地形下高速移动;轮式机器人可以在平坦或简单地形下高速移动,但无法在有障碍或复杂地形下顺利行进。
2、目前,市面上的轮足机器人通常是在机器人的腿部关节处添加轮子,比如,在膝关节处添加一小轮,以使机器人可以跪姿行进,再比如,在踝关节底部附着一主动轮。然而,在关节处添加轮子将增加腿部的惯量,不利于双足运动或双轮运动的控制,且提高了轮式模态和足式模态变化的控制复杂度,导致轮式模态和足式模态变换过程的稳定性和可靠性较低。
技术实现思路
1、本申请提供了一种机器人,能够降低轮式模态和足式模态变化的控制复杂度,提高轮式模态和足式模态变换过程的稳定性和可靠性。
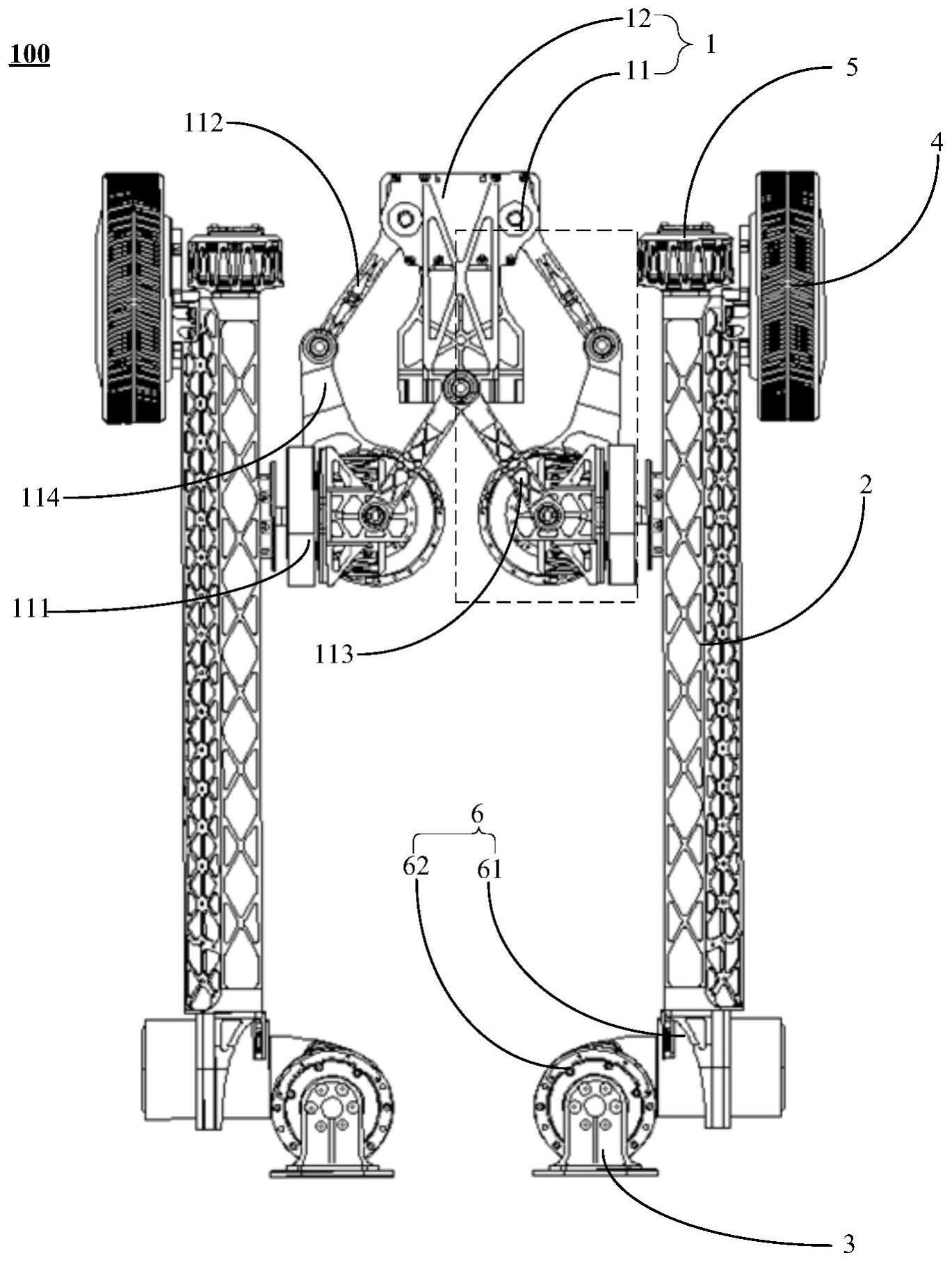
2、第一方面,提供了一种机器人,包括:
3、髋部,所述髋部包括沿所述髋部中轴线对称的两个第一旋转连接件;
4、腿部,设置有两个所述腿部,且分别与所述两个第一旋转连接件相连接;
5、足部,每个所述腿部的第一端与至少一个所述足部相连接;
6、轮部,每个所述腿部的第二端与至少一个所述轮部相连接;
7、其中,所述第一旋转连接件可带动所述髋部沿所述腿部上下运动,并且可带动所述腿部绕所述第一旋转连接件的轴线转动,以调整所述腿部的第一端或所述腿部的第二端中的任一端与地面接触的状态,以使所述机器人进行足式模态或轮式模态的切换。
8、在一些实现方式中,所述腿部包括直线传动件与运动执行件,所述运动执行件活动安装于所述直线传动件、且与所述第一旋转连接件连接,以带动所述髋部沿所述直线传动件上下运动,且所述第一旋转连接件的轴线方向与所述直线传动件互相垂直,以使第一旋转连接件带动所述腿部绕所述第一旋转连接件的轴线转动,以调整所述腿部的第一端或所述腿部的第二端中的任一端与地面接触的状态,以使所述机器人进行足式模态或轮式模态的切换。
9、在一些实现方式中,在所述第一旋转连接件带动所述腿部绕所述第一旋转连接件的轴线转动时,所述髋部沿所述直线传动件进行上下运动,以使所述机器人在进行动态变形时保持平衡。
10、在一些实现方式中,当所述机器人由轮式模态切换为足式模态时,在所述第一旋转连接件带动所述腿部绕所述第一旋转连接件的轴线转动下,所述轮部与地面保持接触,直至所述足部与地面接触时所述轮部离开地面,直至所述腿部与地面垂直时停止转动,以使所述机器人切换为足式模态。
11、在一些实现方式中,当所述机器人由足式模态切换为轮式模态时,在所述第一旋转连接件带动所述腿部绕所述第一旋转连接件的轴线转动下,所述足部与所述地面保持接触,直至所述轮部与地面接触时所述足部离开地面,直至所述腿部与地面垂直时停止转动,以使所述机器人切换为轮式模态。
12、在一些实现方式中,所述髋部还包括支撑骨架和两个活动连接部,所述两个活动连接部分别安装于所述支撑骨架两侧,且沿所述支撑骨架的中轴线对称,所述第一旋转连接件包含于所述活动连接部。
13、在一些实现方式中,所述活动连接部还包括第一摆杆、第二摆杆和第二旋转连接件,其中,所述支撑骨架、所述第一摆杆、所述第二旋转连接件、所述第一旋转连接件所述第二摆杆首尾相连。
14、在一些实现方式中,所述第一旋转连接件与所述第二旋转连接件相连的第一连接位置和所述第一旋转连接件与所述第二摆杆相连的第二连接位置位于同一轴线。
15、在一些实现方式中,所述支撑骨架、所述第一摆杆、所述第二旋转连接件和所述第二摆杆形成平行四边形机构。
16、在一些实现方式中,所述平行四边形机构通过控制所述第一摆杆或所述第二摆杆的转动角度实现所述髋部的展开或折叠。
17、在一些实现方式中,所述转动角度为所述第一摆杆或所述第二摆杆相对于水平方向张开的夹角;
18、在所述机器人切换至足式模态或者轮式模态中的双轮模态时,所述平行四边形机构通过控制所述第一摆杆或所述第二摆杆的转动角度转变为平角来实现所述髋部的展开,以使得两个所述腿部之间距离变宽来保证所述机器人的通过性能;或者
19、所述平行四边形机构通过控制所述第一摆杆或所述第二摆杆的转动角度转变为锐角实现所述髋部的折叠,以使得两个所述腿部之间的距离变窄来保证所述机器人的紧凑性。
20、在一些实现方式中,所述腿部还包括支撑外壳,所述直线传动件安装于所述支撑外壳内。
21、在一些实现方式中,所述轮部包括轮部主体、第一驱动装置和轮部连接板,所述轮部主体绕设于所述第一驱动装置的外部,所述第一驱动装置用于驱动所述轮部主体转动,所述第一驱动装置通过所述轮部连接板与所述支撑外壳固定连接。
22、在一些实现方式中,所述机器人还包括第二驱动装置,所述第二驱动装置的输出端与所述直线传动件的第二端固定连接,所述第二驱动装置用于驱动所述运动执行件沿所述直线传动件的轴线方向做直线运动。
23、在一些实现方式中,所述机器人还包括踝部,所述足部通过所述踝部与所述腿部相连接。
24、在一些实现方式中,所述踝部包括第一转动部和第二转动部,所述第一转动部的第一端位与所述腿部的第一端固定连接,所述第一转动部的第二端位与所述第二转动部的第一端位相连接,所述第二转动部的第二端位与所述足部相连接。
25、本申请实施例的机器人,包括:髋部、腿部、足部和轮部,其中,髋部包括沿髋部中轴线对称的两个第一旋转连接件,设置有两个腿部分别与两个第一旋转连接件相连接,每个腿部的第一端与至少一个足部相连接,每个腿部的第二端与至少一个轮部相连接,通过第一旋转连接件带动髋部沿腿部进行上下运动,并带动腿部绕第一旋转连接件的轴线方向转动,以调整腿部的第一端或腿部的第二端中的任一端与地面接触的状态,以使机器人进行足式模态或轮式模态的切换,从而在髋部的辅助作用下,实现快速进行轮式模态或足式模态切换,降低轮式模态和足式模态切换过程的控制复杂度,以提高轮式模态和足式模态切换过程的稳定性和可靠性。
技术特征:
1.一种机器人,其特征在于,包括:
2.根据权利要求1所述的机器人,其特征在于,所述腿部包括直线传动件与运动执行件,所述运动执行件活动安装于所述直线传动件、且与所述第一旋转连接件连接,以带动所述髋部沿所述直线传动件上下运动,且所述第一旋转连接件的轴线方向与所述直线传动件互相垂直,以使第一旋转连接件带动所述腿部绕所述第一旋转连接件的轴线转动,以调整所述腿部的第一端或所述腿部的第二端中的任一端与地面接触的状态,以使所述机器人进行足式模态或轮式模态的切换。
3.根据权利要求2所述的机器人,其特征在于,在所述第一旋转连接件带动所述腿部绕所述第一旋转连接件的轴线转动时,所述髋部沿所述直线传动件进行上下运动,以使所述机器人在进行动态变形时保持平衡。
4.根据权利要求3所述的机器人,其特征在于,当所述机器人由轮式模态切换为足式模态时,在所述第一旋转连接件带动所述腿部绕所述第一旋转连接件的轴线转动下,所述轮部与地面保持接触,直至所述足部与地面接触时所述轮部离开地面,直至所述腿部与地面垂直时停止转动,以使所述机器人切换为足式模态。
5.根据权利要求3所述的机器人,其特征在于,当所述机器人由足式模态切换为轮式模态时,在所述第一旋转连接件带动所述腿部绕所述第一旋转连接件的轴线转动下,所述足部与所述地面保持接触,直至所述轮部与地面接触时所述足部离开地面,直至所述腿部与地面垂直时停止转动,以使所述机器人切换为轮式模态。
6.根据权利要求2所述的机器人,其特征在于,所述髋部还包括支撑骨架和两个活动连接部,所述两个活动连接部分别安装于所述支撑骨架两侧,且沿所述支撑骨架的中轴线对称,所述第一旋转连接件包含于所述活动连接部。
7.根据权利要求6所述的机器人,其特征在于,所述活动连接部还包括第一摆杆、第二摆杆和第二旋转连接件,其中,所述支撑骨架、所述第一摆杆、所述第二旋转连接件、所述第一旋转连接件所述第二摆杆首尾相连。
8.根据权利要求7所述的机器人,其特征在于,所述第一旋转连接件与所述第二旋转连接件相连的第一连接位置和所述第一旋转连接件与所述第二摆杆相连的第二连接位置位于同一轴线。
9.根据权利要求8所述的机器人,其特征在于,所述支撑骨架、所述第一摆杆、所述第二旋转连接件和所述第二摆杆形成平行四边形机构。
10.根据权利要求9所述的机器人,其特征在于,所述平行四边形机构通过控制所述第一摆杆或所述第二摆杆的转动角度实现所述髋部的展开或折叠。
11.根据权利要求10所述的机器人,其特征在于,所述转动角度为所述第一摆杆或所述第二摆杆相对于水平方向张开的夹角;
12.根据权利要求2所述的机器人,其特征在于,所述腿部还包括支撑外壳,所述直线传动件安装于所述支撑外壳内。
13.根据权利要求12所述的机器人,其特征在于,所述轮部包括轮部主体、第一驱动装置和轮部连接板,所述轮部主体绕设于所述第一驱动装置的外部,所述第一驱动装置用于驱动所述轮部主体转动,所述第一驱动装置通过所述轮部连接板与所述支撑外壳固定连接。
14.根据权利要求2所述的机器人,其特征在于,所述机器人还包括第二驱动装置,所述第二驱动装置的输出端与所述直线传动件的第二端固定连接,所述第二驱动装置用于驱动所述运动执行件沿所述直线传动件的轴线方向做直线运动。
15.根据权利要求1所述的机器人,其特征在于,所述机器人还包括踝部,所述足部通过所述踝部与所述腿部相连接。
16.根据权利要求15所述的机器人,其特征在于,所述踝部包括第一转动部和第二转动部,所述第一转动部的第一端位与所述腿部的第一端固定连接,所述第一转动部的第二端位与所述第二转动部的第一端位相连接,所述第二转动部的第二端位与所述足部相连接。
技术总结
本申请提供了一种机器人,可应用于人工智能、机器人应用、机电一体化等各种应用场景。该机器人包括:髋部、腿部、足部和轮部,其中,髋部包括沿髋部中轴线对称的两个第一旋转连接件,设置有两个腿部分别与两个第一旋转连接件相连接,每个腿部的第一端与至少一个足部相连接,每个腿部的第二端与至少一个轮部相连接,第一旋转连接件可带动髋部沿腿部上下运动,并且可带动腿部绕第一旋转连接件的轴线转动,以调整腿部的第一端或腿部的第二端中的任一端与地面接触的状态,以使机器人进行足式模态或轮式模态的切换,以降低轮式模态和足式模态切换过程的控制复杂度,并提高该过程的稳定性和可靠性。
技术研发人员:张东胜,钱泽宇,盛闽华,徐淇玮,黎雄,梁聪慧,张正友
受保护的技术使用者:腾讯科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!